基于无人机巡检图像的绝缘子串自动定位研究
2022-01-21谢学平
杨 龙,谢学平,宁 骁,汪 林,徐 盛,吴 琼,朱 晗
(1.国网湖北孝感供电公司,湖北 孝感432000;2.三峡大学电气与新能源学院,湖北 宜昌443000)
0 引言
绝缘子串作为架空输电线路中一种重要部件,对于电力系统的安全运行起着重要的作用[1-4]。然而,架空线路中的绝缘子串由于长期暴露在野外,绝缘子串易受到环境污染,造成损坏,影响线路的安全运行[5-6]。因此,需要对绝缘子串进行定期检查与清洗[7-8]。传统的检查方法主要是人工巡检,通过无人机拍摄架空线路中的绝缘子串部件,再由人工通过巡检图像进行绝缘子串查找和识别,该方法效率低下,且在复杂环境下易发生漏检情况。为了杜绝这种漏检情况,保证线路的安全运行,将机器视觉技术引入到无人机巡检图像的绝缘子串定位之中。其中,便涉及到图像定位算法,利用计算机对无人机采集到的架空输电线路图像进行处理、分析和定位,该方法具有准确、快速的特点,可以有效替代人工查找的方式。
目前,用于无人机巡检图像的绝缘子串定位算法主要分为两类。第一类是基于传统数字图像处理的定位算法,文献[9]利用频率调谐方法计算出图像中绝缘子串的显著性信息,再通过Otsu算法和开运算得到分割出的绝缘子串。文献[10]对红外图像进行拉普拉斯边缘提取,获取图像的纹理特征,通过角度内和角度间进行特征聚类,识别红外影像中绝缘子串的中心线,得到位置信息。文献[11]通过中值滤波和Hough变换提出改进的CV模型实现绝缘子串的精确定位。第二类则是基于深度学习[12-15]算法,文献[16]将二值化赋范梯度分类器和卷积神经网络相结合实现绝缘子串的自动定位。文献[17]在散射变换原理和卷积神经网络的基础上,将低通滤波器和Gram矩阵法结合起来降低绝缘子串背景信息干扰,处理后的图像利用SSD(Single Shot Multiox Detector)网络的定位结果比仅仅使用SSD处理原图像具有更高的精度。
为了实现架空线路中绝缘子串的自动定位,本文提出了一种新的定位方法。首先,将巡检图像从RGB颜色空间转换到HSV颜色空间[18],分别在H、S、V 3个颜色空间分量进行阈值分割并进行二值化操作,得到绝缘子串的初步位置信息。为了能够区分同一巡检图像中的不同绝缘子串,以得到的绝缘子串点位信息为圆心,构建点位信息的影响范围,本文将相连通的圆所包含区域为绝缘子串位置。但由于杆塔和绝缘子串存在相似性,无法做到有效分割,导致部分区域存在误定位。为了剔除这些误定位区域,本文对所有区域内的信息量进行分析,剔除无效定位。
1 绝缘子串定位
1.1 阈值分割
RGB是图像处理中最基本、最常用的颜色空间。然而,RGB图像易受到光照的影响,并不适合用于阈值分割任务中。而HSV颜色空间由色调、饱和度和明度组成,相比较于RGB颜色空间中颜色由三原色共同组合而成,HSV颜色空间可以更好地反映颜色变换,更加适合用于阈值分割[19-20]。
本文将巡检图像的RGB图像转换为HSV图像,基于HSV颜色空间对巡检图像进行阈值分割,其参数范围设置如表1。

表1 HSV各分量范围设置Table 1 HSV component range setting
其中,以H分量为例,Hmin和Hmax分别表示H分量的最小值和最大值。
通过表1中各分量设置的范围,将图1中的绝缘子串信息提取出来,得到绝缘子串上部分区域的分割结果,分割结果如图2所示。

图1 无人机巡检图像Fig.1 UAV inspection image

图2 绝缘子串部分区域分割结果图Fig.2 Partial area segmentation result of insulator string
本文通过阈值分割提取到绝缘子串上的部分区域,然而,这些离散区域无法完整有效描述整个绝缘子串的位置信息。并且,这些离散区域没有进行分类来表示不同绝缘子串所处的位置。
1.2 连通区域获取
为了让这些绝缘子串上的离散区域连通在一起,构成一个完整的封闭轮廓,来精确定位对应区域的绝缘子串位置,本文以离散区域的中心点为圆心,构造离散区域的影响范围,将所有离散区域的影响范围所构成的连通区域认定为绝缘子串所在位置。具体步骤为:
如图3所示,假设A、B、C为同一绝缘子串上的3个离散区域,以A、B、C 3个离散区域的中心为圆心分别构建各自的影响范围,其中r为影响半径。从图3中可以看到,离散区域所构成的影响范围形成了一个连通区域,本文将连通区域外轮廓所包含的区域认为是绝缘子串所在位置,所包含的区域如图4所示。

图3 离散区域影响范围示意图Fig.3 Schematic diagram of the influence range of the discrete are
图4 影响范围包含区域示意图Fig.4 Schematic diagram of the influence range including the area
基于上述的方法对阈值分割的离散区域进行处理,得到所有可能存在绝缘子串的区域,结果如图6所示。

图6 分割结果影响区域图Fig.6 The image of the affected area of the segmentation result
1.3 有效区域提取
然而,由于阈值分割的不准确,一些非绝缘子串上的离散区域也被分割出来,导致图8中存在大量不含绝缘子串的误定位区域。为了剔除这些误定位区域,本文首先用矩形对定位区域的外边缘进行拟合,其拟合的方式如图5所示。

图5 矩形拟合区域外边缘Fig.5 The outer edge of the rectangular fitting area
然后统计拟合矩形区域内所包含的离散区域数量,判断条件如公式(1)所示:

式(1)中,f为标志位,1表示正确定位区域,0表示误定位区域,δ表示该区域类离散区域的数量,本文将区域中离散区域数量大于10的区域认定为正确定位区域,剔除误定位区域后的结果如图7所示。

图7 剔除误定位区域后的结果图Fig.7 The result after removing the mis-located area
2 实例分析
实验使用的计算机处理器为AMD Ryzen 5 2600X,内存为16 GB,基于Python3和Opencv函数库实现。
2.1 实验一
本文提出的方法可以对架空线路中各种背景下的绝缘子串做出精准定位,图8展示了10组绝缘子串在多种场景下定位结果,如表2所示,定位场景包括近景、遮挡、背景复杂、远景、小目标、中景和目标不全。针对这些场景下本文方法均可做到精准定位,表明了本文所提方法具有较强的泛化和抗干扰能力。
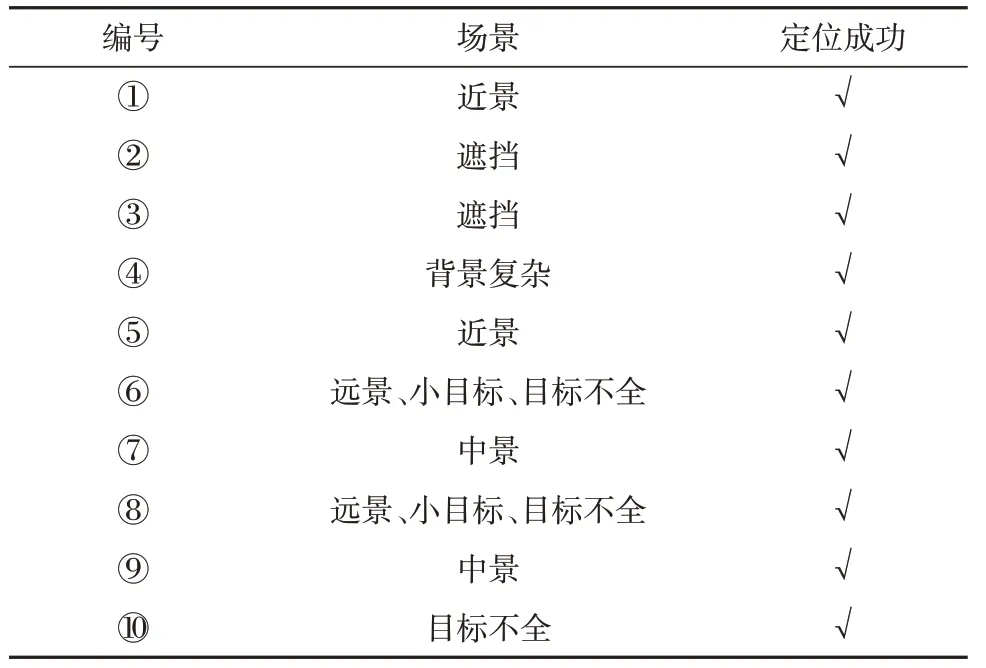
表2 不同场景下绝缘子串定位结果Table 2 Location results of insulator strings in different scenarios

图8 巡检图像绝缘子串定位结果图Fig.8 Inspection image insulator string positioning result map
2.2 实验二
如图9所示,展示了不同影响半径r下绝缘子串定位结果。

图9 巡检图像不同影响半径r下绝缘子串定位结果图Fig.9 Insulator string positioning result diagram under different influence radius r of inspection image
当影响半径r为10、20时,绝缘子串出现大量漏定位和未完全定位,离散区域的影响范围无法构成连通区域。当影响半径r为30、40、50、60、70时,绝缘子串无漏定位,但受到遮挡的绝缘子串②⑤未完全定位,当r≥80时,绝缘子串无漏定位也无完全定位。最终实验结果如表3所示。
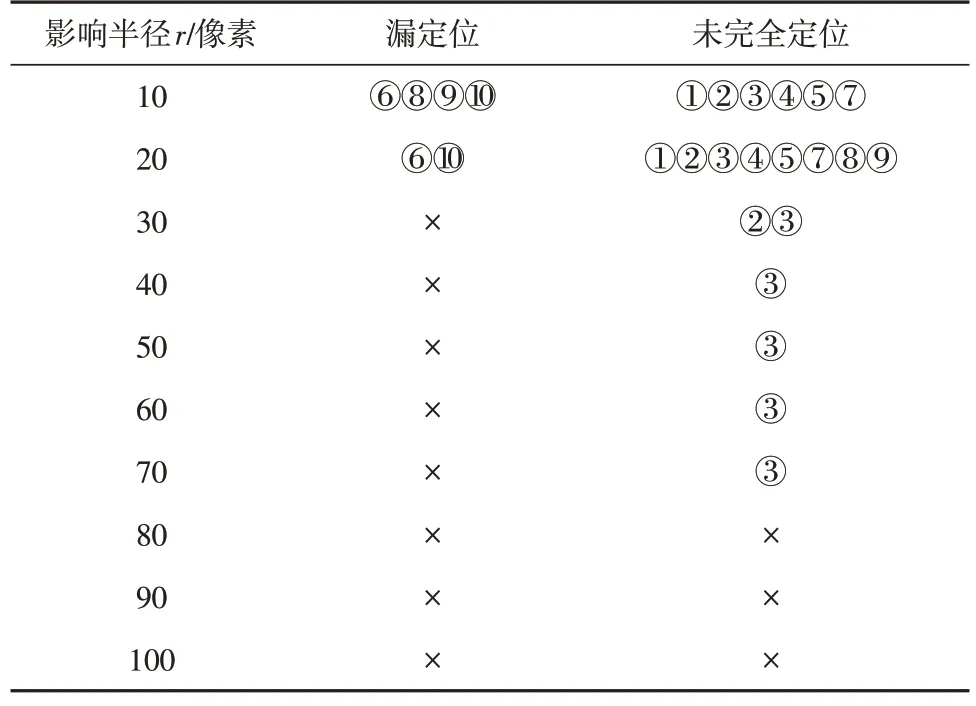
表3 不同影响半径r下绝缘子串定位结果Table 3 Insulator string positioning results under different influence radius r
2.2 实验三
为了能够自动确定绝缘子串定位时影响半径r的最优值,本文对高空架空线路中绝缘子串的非目标不全定位区域进行椭圆拟合,并利用拟合椭圆长轴与短轴之比进行判断定位是否准确完整,判断条件如式(2)所示。

式(2)中,AxisL、AxisS分为拟合椭圆的长轴和短轴,长轴与短轴之比大于2.5的为正确定位,若所有定位区域拟合椭圆长短轴之比均大于2.5,则表示该影响半径r可以实现对架空线路中绝缘子串的精确定位。为了得到影响半径r的最优值,假定影响半径r=10为初始影响半径,以10像素为步长对影响半径进行逐步递增,则所有拟合椭圆满足公式(2)的最小影响半径r为影响半径的最优值。
如图10所示,展示了影响半径r=70和r=80时的绝缘子串定位区域的椭圆拟合图,可以看到,图中完整绝缘子串拟合椭圆的长轴和短轴之比都已经注明。就③号绝缘子串而言,当影响半径r=70时长短轴之比为1.5,影响半径r=80时长短轴之比为2.9,所以影响半径r=80时相比于r=70时具有更好的定位效果,且r=80为满足要求的最小影响半径,因此r=80为最优值。
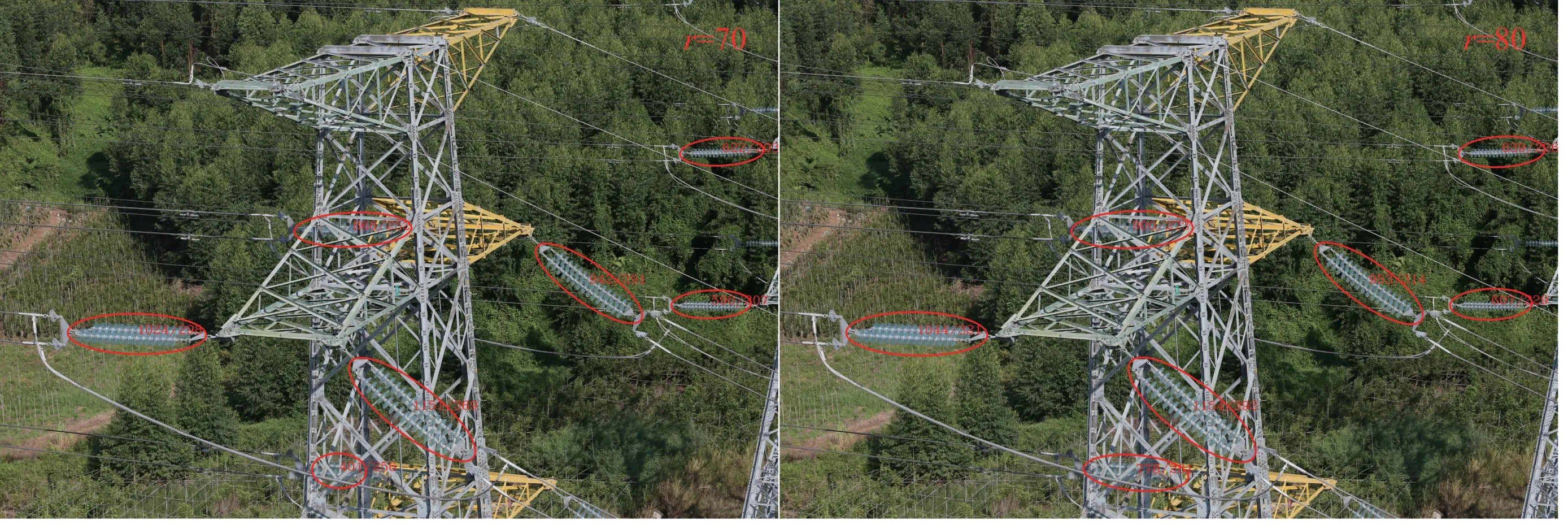
图10 影响半径r=70、r=80下非目标不全定位区域的椭圆拟合结果Fig.10 The ellipse fitting result of the non-target incomplete positioning area under the influence radius r=70 and r=80
3 结语
本文基于传统的图像处理技术,提出了一种输电线路在复杂环境下玻璃绝缘子串自动定位方法。首先,采取HSV和阈值分割相结合的方法提取绝缘子串上的离散特征。然后,以离散特征中心点为中心构建离散特征的影响范围,将影响范围所构成的连通区域认定为绝缘子串所在位置。最后,为了剔除误定位区域,统计连通区域内离散特征的数量,提高自动定位精度。
实验结果表明,本文所提方法对于复杂背景、遮挡、小目标、目标不全等情况下的玻璃绝缘子串均能实现精准定位,可代替人工对无人机巡检图像的玻璃绝缘子串查找。未来的目标是将自动定位算法与互联网技术相结合,构建检测中心,实现线上检测。
