基于物联网的多功能智能种养装置的设计与开发
2022-01-20孙昌权卢颖涛
孙昌权,卢颖涛
(江苏农林职业技术学院,江苏 句容 212400)
0 引言
随着城市化建设进程的加快,城市化建设用地与绿化用地之间的矛盾日益突出,如何在现代化城市中利用有限的土地资源营造绿色生态的环境,成为发展绿色都市亟需解决的问题。
针对现状,许多研究学者和相关企业单位设计和开发了符合市场需求的产品[1-6]。陈泽华、刘雨青等人[7]开发的多功能家用种植池,利用LabVIEW 作为上位机,可对种植池内的温度、湿度、pH 值等环境参数进行远程实时采集和调节。蒲凤林等人[8]利用鱼菜共生原理设计了一种家庭景观式的鱼菜共生系统,很好地将鱼粪及食物残渣作为蔬菜肥料使用。
笔者结合参考文献和用户实际需求,设计和开发了一种适用于家庭的智能种养装置。该装置由水产养殖系统、种植系统与智能化控制系统三部分组成,实现种植与水产养殖一体化。结合自动控制、单片机控制等技术,使得装置更加智能化,方便用户使用。
1 系统总体方案设计
1.1 装置结构设计
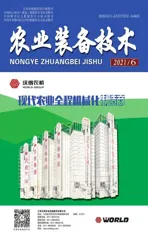
本装置设计了垂直立体式种养结构,其装置结构框架与实物如图1 所示,其主要包括水过滤回收池、组合式立体植物栽培槽、嵌入式玻璃鱼缸、可伸缩式植物补光灯与顶部的智能控制区域。装置正反面各设计了7 层组合式植物栽培槽,顶层与第二层植物栽培槽上方,安装有滴灌头,通过水泵将过滤后的水输送到管道中。在装置的中间安装一体式传感器,可以采集环境中的温度、湿度、光照强度与CO2浓度数据。鱼缸内安装有水泵、鱼缸灯与鱼粪收集器,其中鱼粪收集器利用压差原理,将水中的粪便通过鱼缸进水产生的压差让粪便随水吸入收集器中,进入到底部的过滤水箱进行沉淀、分解,最终形成肥料为植物提供养分。水过滤回收池内有两个水泵、杀菌灯和EC 传感器,其中水泵用于鱼缸水循环和植物供水,杀菌灯用于水质杀菌消毒,EC 传感器则检测水质情况。
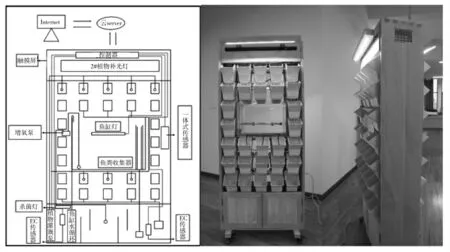
图1 装置结构框架与实物
1.2 控制方案设计
控制系统由环境监测模块、继电器控制模块、远程模块与触摸屏四部分组成,系统总体控制方案如图2 所示。环境监测模块由传感器、RS485/232 收发器、单片机芯片等硬件电路组成,其中单片机芯片为STM32F103ZET6,与传感器通过485 接口以ModBus协议进行数据交互。继电器控制模块用于驱动控制执行机构动作,操作人员可以通过装置侧面的触摸屏对执行机构进行实时操控,也可通过远程手机小程序与计算机WEB 操控。远程控制模块由有人物联的4G 模块(WH-G405tf)组成,该模块支持MQTT、Socket 等多种通信与云服务进行通信。
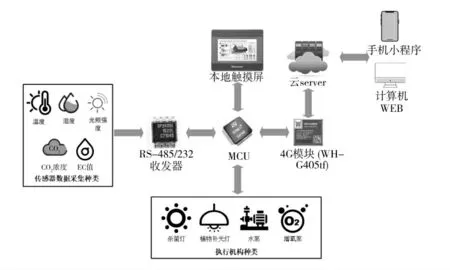
图2 系统总体控制方案
2 系统硬件设计
2.1 硬件系统整体设计
系统硬件PCB 电路设计如图3 所示。所使用的硬件电路为自主研发产品,该硬件电路将采集、控制与远程等模块集成在一块电路板上,极大地提高了产品的整体性与美观性。该硬件系统由2 路RS485采集、2 路模拟量采集、14 路继电器输出和8 路开关量输入组成,能够满足本文开发的智能种养系统使用。
图3 PCB 电路设计
2.2 环境采集模块设计
本系统选用的传感器为建大仁科四合一集成传感器(RS-GZCO2WS-N01-2),该传感器采用485 通信,标准ModBus-RTU 通信协议,通信地址、波特率等参数可使用上位机软件进行设置。使用时只需给传感器提供10~30 VDC 电源,并将传感器两根485通信线接到控制器的A1 与B1 即可。控制器RS485控制电路设计如图4 所示,其中SP3485EN 为+3.3 V低功耗半双工收发器,当单片机要发送数据时,控制485_1 为高电平,数据通过TX1 发送;当单片机要接收数据时,控制485_1 为低电平,数据通过TX1接收。系统可通过本地触摸屏设置数据上报周期,当不进行数据收发时,可让传感器与控制器处于休眠状态,以降低功耗。
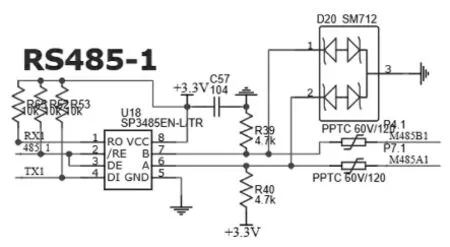
图4 RS484 电路设计
2.3 远程控制模块设计
远程控制模块由有人物联的4G 模块(WH-G405tf)、物联网卡与其他辅助电路组成,远程控制模块电路设计如图5 所示。4G 模块的功能是通过4G 无线与云服务器建立远程通信,单片机将需要上传的数据按照Socket 通信协议的方式通过4G模块转发至云服务器,接收、解析并执行来自服务器的控制指令。
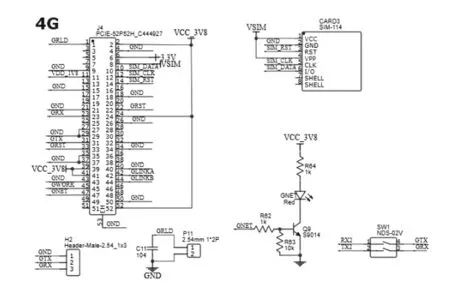
图5 远程控制模块电路设计
3 系统上位机软件设计
系统共有2 个上位机,其中本地上位机为电容式触摸屏,安装在装置的侧面,用于监测环境参数与对装置的控制。本地上位机界面如图6 所示,可实现手自动切换控制,默认为手动控制。当打开自动模式后,可在参数设置内对温度、湿度和光照强度设置上下限值,系统即按设置值与传感器采集的数据进行比对,从而实现自动控制。
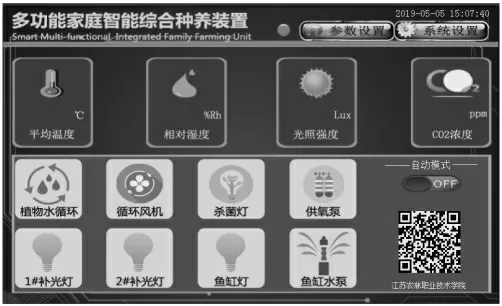
图6 本地上位机界面
为解决用户长时间不在家,导致植物与鱼类无人看管而死亡的问题,系统加入了远程管控功能。计算机WEB 端的远程管控界面如图7 所示,手机小程序远程管控界面如图8 所示。当用户不在家时,可以通过手机和计算机登录系统,远程对植物与鱼类进行水循环、灌溉、补光等操作。

图7 计算机WEB 端远程管控界面

图8 手机小程序远程管控界面
4 系统试验
为检测种养装置内的环境参数传感器数据采集的准确性和执行控制的稳定性,特对其在各种环境下进行稳定性测试。随机选取24 h 内传感器采集的数据历史曲线图,如图9 所示,对比当天通过手持式高精度测量仪测量数据,发现数据误差为0.1%左右,在设计范围内。通过远程和本地对装置机构控制的反应时间进行测试,结果表明,装置控制响应时间在0.2 s 左右,符合设计要求。
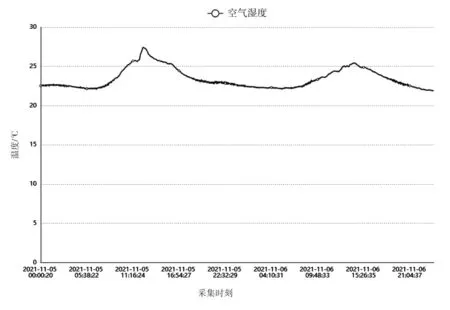
图9 24 h 四合一传感器采集历史曲线