农机自动驾驶路径规划技术的发展研究
2022-01-20高文杰颜廷昊奚小波张瑞宏
卜 钒,高文杰,颜廷昊,奚小波,张瑞宏
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引 言
近年来,我国大部分地区的农业生产仍是通过传统经验来实现田间作业,因此容易出现重播、漏播的状况,常导致作业效果差且无法及时完成计划作业任务,延误农时且后期田间管理也存在许多问题[1]。为改变这种现状,升级采用农机自动驾驶路径规划技术进行田间作业刻不容缓。采用农机自动驾驶路径规划技术预先规划设计出作业参考路径,可以大幅改善农田作业质量。与其他领域最短路径设计不同[2],农机路径规划是农田大块全覆盖区域路径规划与最适地转弯路径规划算法的研究。因此要依赖农田的各种地理信息与具体农作物种植要求,合理规划设计路径。本文结合相关研究资料,阐述国内外农机自动驾驶路径规划技术的研究现状,分析路径规划技术的发展特点,对相关问题提出发展对策,以期为农机自动驾驶路径规划技术及配套装置的研究和推广提供参考。
1 国内外研究现状
1.1 国外研究现状
对于农机路径规划的研究,国外起步较早,主要以行驶路径规划研究和作业全覆盖路径规划研究为主。Deng 等[3]提出了一种多障碍物路径规划与优化的方法,根据起点和目标点确定基础障碍物及其轮廓点集,利用多目标算法进行距离和路线平滑度规划设计。Saravanakumar 等[4]提出基于快速探索随机树算法的采样无人机避碰路径规划算法,简化节点连接策略和利用可行集进行避碰,可以在较短的时间内发展一条路径,引导车辆绕过障碍物避免碰撞。Nascimento 等[5]提出基于概率泡沫的路径规划算法,通过利用广度搜索的方式,使覆盖带有气泡的自由配置空间来执行路径规划。Mohd 等[6]提出利用灰狼优化算法和人工势场方法的混合概念对移动机器人进行实时路径规划,首先定义了焦点区域,该区域可以显示所有可能的机器人运动的无障碍位置,然后通过灰狼算法计算最小化区域内产生的位置和人工势场值来搜索最短路径。Rakita 等[7]提出了一种基于采样的路径规划方法,通过最小化碰撞检查样本,启发式算法可以优先搜索更有前途的区域,并从局部极小区域中剔除样本,引导搜索并远离观察到的碰撞物。
1.2 国内研究现状
国内对于农机路径规划的研究起步较晚,但近几年发展较快。由于北斗导航的快速发展,各个领域对于路径规划也有了新的探索。化祖旭等[8]提出了基于三次贝塞尔曲线的汽车避障路径规划,将避障路径划分为由两段三次贝塞尔曲线构成的避撞路径与变道路径,并建立了安全距离模型完成路径规划。张珂等[9]提出了基于改进人工势场法的路径规划方法,通过行驶速度的可变边界斥力势场, 在保证车辆安全的前提下调节障碍物斥力势场大小,完成改进传统人工势场的路径规划。刘智飞等[10]提出了基于开阔视野蚁群的路径规划算法,通过建立栅格环境模型,将路径信息转化为可以识别的0-1 矩阵模型;通过改进开阔视野蚁群算法,改进视野范围和栅格模型适应性,减小路径规划长度并提高路径规划效率。张景尧等[11]提出了一种基于粒子群的局部路径规划算法,目的是解决农机田间路径偏移问题。当农机路径偏移时,及时导入一组新的跟踪点信息,以新的跟踪点和原路径点的欧氏距离重新评价粒子群, 使农机逐渐恢复初始路径。游达章等[12]提出了改进的灰狼优化算法对路径的规划,通过建立二维空间模型将原算法中的线性收敛因子转为非线性, 并将粒子群算法与灰狼优化算法相结合进行路径规划,协同量子化优化可以解决局部最优和搜索路径消耗大的问题。
2 主要技术分析
农田作业时长、作业成本、作业难度系数是衡量作业路径优化程度的主要指标,如何缩短作业时长、减小作业成本、降低作业难度系数是农机作业路径优化的主要研究内容[13]。目前,一般田间作业路径规划主要是将作业区域划分为直线和转弯区域进行规划。以下分别对常用的行驶路径规划方法和全覆盖路径规划方法进行简单介绍。
2.1 行驶路径的规划方法
田间作业直线行驶路径如图1 所示。在路径规划方案中,虽然直线路径的作业时间较久,但转弯路径的规划难度和重要性都大于直线路径。一般田间作业直线路径可划分为平行等距直线簇, 作业信息参数可分为作业方向、路径的起止端点和相邻路径线的距离[14]。
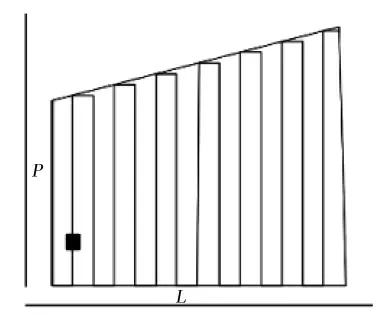
图1 田间作业直线行驶路径
直线路径规划就是在作业起始位置之后,按照一定幅宽在作业区域中生成平行等距线段。直线路径可在农田坐标系中生成,相关直线的斜率、线段端点位置和路径的距离等信息也可在坐标系显现。
农机路径规划时需要确定作业方向:通常导航会识别并标识农田边界,依据农田边界排水沟与地头的相对关系运算作业方向数据;导航也会根据识别农机坐标数据的改变,通过拟合起止作业路径的坐标数值来计算作业方向。
农机完成一段直线路径作业后,为避免往复倒车作业,需要转弯到下一直线作业区。转弯路径是调转方向的行驶轨迹曲线,是进入旁边直线路径必不可少的轨迹。不同路径规划算法得出的转弯路径行驶距离不同,所留下的轨迹区域也不同,因此需要适地确定转弯轨迹。常见的转弯方式有弓形、半圆形、梨形等[15],如图2 所示。其中,R 表示车辆转弯半径,P 表示两转弯路径之间相邻直线路径的距离。
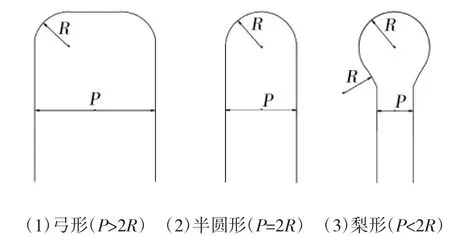
图2 常见的农机作业转弯方式
因农田作业面积是确定的,故农机转弯时所占用的区域越大,则直线作业区域面积相对越小。因此,使转弯区域面积最小化是不同转弯路径方法的优化目标之一,使转弯区域面积最小以扩大作业区域,提高直线路径作业率。
2.2 全覆盖路径规划方法
实现农机全区域自主作业需要多种技术的支持,其中全覆盖路径规划方法是实现农机自主作业的路径规划算法之一。全覆盖路径规划方法主要用于在给定区域或空间范围内获取一条遍历所有有效区域的最佳路线。
实施全覆盖路径规划,首先应获取田间作业位置、地块形状、田块尺寸、障碍物、作业要求等信息,然后根据实际播种或田间管理活动合理规划路线[16]。目前全覆盖路径规划有两种常用形式:一是分解单元法,将目标农田总区域分解为一个个小单元进行作业;二是栅格法,将目标农田总环境区域分解为一个个均匀的矩形网格,参考小网格信息对农机的工作路径和状态进行调整作业。
3 问题与对策
目前,我国农机自动驾驶路径规划技术的研究主要围绕以下方面开展,同时也需要解决与之相应的一些问题。
3.1 作业时效性
农作物播种时,需要抢农时;成熟后,需要尽快收割,因此具有很强的时效性。单农机作业时,降低单位面积作业时长可以提高作业效率;多农机协同作业时,总的作业时间将更少。作业时长主要受农田地头转弯时间影响,地头转弯时间越短,作业时长越短。目前我国对转弯路径规划技术的研究仍然不成熟,农机转弯费时费力。因此优化农机作业地头转弯路径,选择最优的转弯方式是今后的发展方向。
3.2 作业经济性
农机作业时,能源消耗也比较大,降低作业成本可以更好地提高产值,同时还能保护环境。因此在农田采用时间更短的转弯方式,不仅可以缩短作业时长,还能降低农机能源消耗。我国是能源消耗大国,优化农机作业路径规划方式,可以大幅降低能源成本,提高农田经济产出。
3.3 作业难度
目前,我国传统农机采用梨型作业方式,转弯弧度较大,不仅增加了转弯时间,而且增加了作业难度。优化路径规划,使农机作业时尽量避免难度较大、行程较长的转弯路径,可以降低作业难度,提高多农机协同作业时衔接的准确性。
3.4 作业指向性
目前我国传统农机作业一般为经验作业,在进行小面积农田作业时,作业效果尚可,但是在进行大规模农田作业时,作业指向性不明显。有指向性的田间作业可以为路径规划提供大方向,提高农机作业规划性,指导田间作业顺利进行。
3.5 智能化与精准化
目前我国农机自动驾驶仍存在许多问题,如定位不准确、直线与转弯路径导航衔接不齐、规划路径不是最优路径等。导航系统为农机提供农田、作业行等位置信息,但用智能化处理将数据转化为路径算法的水平有待提高。合理的路径规划可以为农机作业提供最优作业轨迹指导,提高农机作业的精准化、智能化水平。
4 结 语
农机自动驾驶作为自动驾驶的一部分,在农业领域应用广泛。自动驾驶的出现加快了现代农业的发展,路径规划这一传统数学问题也在自动驾驶中发挥了重要作用。路径规划技术由蚁群算法启发而来,因此,导航技术的发展在农机自动驾驶发展过程中必须得到解决与优化。全覆盖作业路径规划是智能农机路径规划发展的大方向。不同方法适用于不同农田状况,传统的以路径最短为目标进行的路径规划局限性较大,不能综合处理农田状况。因此,不断优化路径规划算法是智能农机的研究趋势,也是我国农业现代化发展必须解决的问题。