摇晃式沙果采摘机的设计**
2022-01-19李昀泽周泓昊管士睿王鑫鹏
李昀泽 ,周泓昊 ,管士睿 ,刘 鹏 ,王鑫鹏
(佳木斯大学机械工程学院,黑龙江 佳木斯 154007)
近年来,随着我国农业经济的快速发展,林果业在农业经济的占比越来越大,我国已成为世界上林果覆盖面积以及产量最大的国家,林果业成为许多地区的支柱产业[1]。沙果在中国已有8 000多年的栽种历史,有降低血压、保护肝脏、抗癌抑癌的功效[2]。沙果的采摘是目前亟需完善的重要环节,国内的沙果采摘主要是靠人工作业,采摘费用约占成本的30%~45%,且人工敲打采摘易损坏沙果[3-4]。因此,实现沙果的机械化采摘,在降低生产成本和成果破损率、提高农民的收入等方面均具有重要的意义。
1 整机结构与工作原理
摇晃式沙果采摘机如图1所示。该机的主要功能是利用机器手抓树干,以不同的频率晃动树干进行沙果的采集,再通过在分级装置上安装筛分震动马达和轴流风机实现沙果与果叶的分离以及沙果的分级处理。此外,还在收集箱中配置了RGB传感器。由于沙果成熟度的标识采用了RGB颜色特征表示,利用颜色值确定沙果成熟度的标准,从而将成熟度较高和较低的沙果区分出来,实现对沙果成熟度的识别。利用传动机构使发电机采用V带传动与曲柄连杆机构相连时,与曲柄连杆机构相接的曲柄滑块会左右移动,并且曲柄滑块上有两个可调整的连杆机构,能够按照树身的高低调整两板之间的距离,还有柔性橡胶垫保护树身,在可调节频率和强度的状况下并不会对果树生长产生什么影响。机械下部有限位轴用来稳定树身,当机械运转时,在机械爪下面的收集装置能够围住果树,而在摇动过程中沙果会滑落在采集设备里,从而便于采集。同时,机械机架上还预留了柴油引擎安装位置,便于在大规模栽培的情形下采用,该机器能够大幅减少劳动成本、提高生产效率以及保证沙果的新鲜度。
整机结构如图1所示。

图1 摇晃式沙果采摘分级一体化机器人三维结构图
2 关键部件设计
2.1 摇晃机械手
沙果树的震荡频率和振幅程度是影响采摘率的主要因素,因此,对振幅和频率的控制是关键,自动控制系统主要是根据沙果树的振幅调节马达转速。机器在工作时,机械爪抓紧沙果树主干上部,树干在进入集果板缝隙的过程中,集果板上的履带被动运动,将集果板的缝隙填满。随后,电机开启连带往复结构运动使得机械爪作摇晃运动,此时利用传感器测得树干的振幅程度,将实时参数进行对比匹配,利用反馈控制步进电机的转动,调节液压回路的流量,使沙果树振幅达到最佳。摇晃机械手三维图如图2所示。

图2 摇晃机械手
2.2 立体三级分级装置
如图3所示,立体三级分级装置总体外形为长方体,长度为600 mm,宽度为500 mm,高度为400 mm,其内部结构分为分级和收集两部分。在分级箱与输送管的连接位置,用分筛板形成分级装置。在分级箱内部设置斜坡和安装轴流风机,沙果从采摘器滚落到斜坡的同时实现沙果与果叶的分离,在由上至下的滚动过程中掉落至不同的孔径中,从而实现沙果的分级。同时,不同的缝隙之间采用隔板隔开,分级箱做成抽屉的形式,极大地节省了人力,提高了工作效率。

图3 立体三级分级装置
通过多次实验,发现在分级装置中的斜槽倾角为30°时,沙果从斜槽中能够顺利滑落到指定的箱子中,于是便将斜槽倾角设定为30°。然后对调查情况和沙果的实际规格进行分析,通过依次降低高度来设定适当的孔径,把沙果经过筛选的孔径分成40 mm以内、40 mm ~55 mm之间和55 mm以上三层,再通过分级法来设定适当的间距,实现了按照沙果尺寸的分级。
分级装置由筛分板和筛分震动马达组成,所述筛网孔径大小根据筛选需求选择,并且自上至下依次设置在筛分板上。所述筛分板的底部四角固定有弹簧,共有4个弹簧,均固定在机箱外壳和筛分板之间。筛分震动马达通过螺栓固定在筛分板的底部,并通过导线与电源开关连接。
3 理论设计计算
3.1 步进电机的微震动模拟算法理论
传统状况下,电动机的工作过程多是匀速运动,而步进电机则在速度受到频率控制的情况下运动。因此,必须在工作过程的启动与终止过程中,同时解决因启动频率过高而造成的失步问题和因终止时速度过快而造成的振动问题[5]。处理该问题的办法有许多,常见的一种解决模型有直线规则的匀加减速限制、阶梯规则的车速限制以及指数规则的车速限制[6-7]。
在微震动仿真平台的实际操作中,轴的直径是一定的,而在整个仿真流程中,根据图4给出的对S型曲线的计算,整个流程又可以分成加速阶段和下降阶段[8]。在满足所规定的最高车速时,如果轴长不满足上述条件,则需要根据具体要复现的高加速度场景来规划行走路线,并且按照在各种场合下加速度和速度差的大小,从而结合实际的轴长来测算相应的位置。按照测算出的轴长来选取各种抛物线型的S型曲线,设置出在减速至静止阶段时的移动距离。
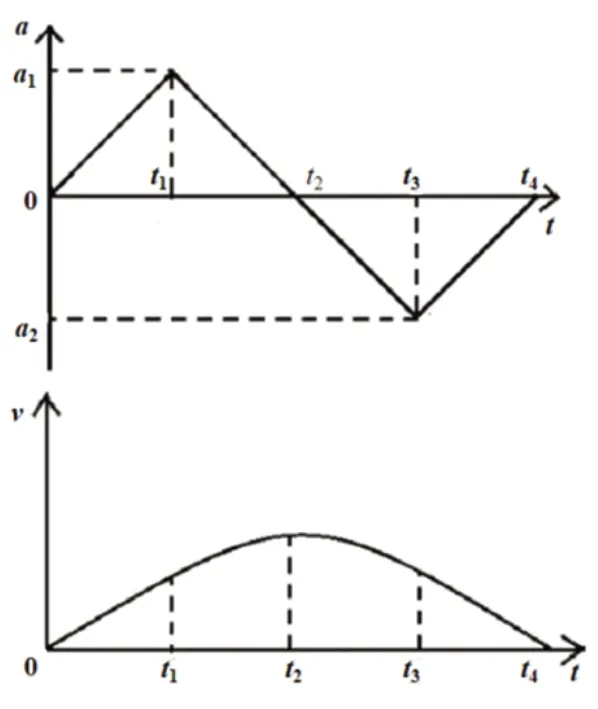
图4 S型曲线
以四段型曲线算法为例,在0~t1时段,设加速度曲线上,加速度的加速率即加速度曲线的斜率为Amax,则可得a(t)=Amax*t。对加速度函数加以计算,并代入速率曲线起始位置(0,v0),可得速率时刻函数表达式为v(t)=Amax*t2/2+v0,进而得出第一加速时段的定位为S(t)=Amax*t3/6+v0*t,那么0~t1时段内所形成的位置即为:

在t1到t2时间段,加速度函数设为a(t)=kt+b,代入坐标点(t1,Amax*t)、(2*t1,0),运算得到a(t)=Amax*t+2Amax*t1,经积分后得到的加速函数为:

进而求得位移函数为:

则时间段t1到t2之间的位移为:

时间0到t2之间的位移为:

3.2 系统构成与算法的实现
单轴的步进电机等待上位机下达命令给相应的控制器,并通过控制器对控制电动机进行一定的加减速动作[9-10]。控制器通过32位芯片的STM32和步进电机驱动器构成驱动层,并用作下位机来实现和上位机之间的命令通信。步进电机将一次微步的间距设为s,速度v则应该用在加速阶段的工作转速运算公式v(t)=Amax*t2/2+v0,其定时时间为:
将定时器周期T转换为微秒Tμs,则:
再将变量t转换为tμs=t/1 000 000,得:
此时分母最小为2v0,因此v0越小,其差值也越大。可以把分子分母数同时增加一百倍,从而减小误差,以提高定时器的计时准确度,否则会由于定时器计时周期变大,而造成步进电机加转速不持续,则没有了S型曲线和加减的含义。为了实现最高精确度,使用了时钟频率较高的STM32F103系列晶片,该晶片的高频能够做到72 MHz,而且定时器资源也相当充足。
4 结论
1)课题组设计了一款适合在丘陵山区将沙果进行采摘、收集、分级的摇晃式沙果采摘机。
2)通过理论设计和系统构成的算法计算,实现步进电机在工作时对加减速的控制,提高采摘机的工作稳定性。
3)分级装置中增加震动电机对分级箱产生上下摆动,实现快速分级,另外安装轴流风机,在收集过程中实现沙果与果叶的分离。
