一种自动铺轨式全方位支护掘进机的研发方案*
2022-01-19张君王超凡
张君,王超凡
(1.太原理工大学 机械与运载工程学院, 山西 太原 030024;2.太原理工大学 现代科技学院, 山西 太原 030024)
0 引言
在煤矿巷道掘进的工作过程中,减少施工人员的作业量、保证作业的质量要求、优化作业过程、缩减施工周期、提高巷道断面利用率,对煤矿企业高效发展具有决定性意义[1]。现阶段掘进机大部分为履带式行走,支护效率低,对于后期巷道内铺轨作业也无法同期完成,使得工作周期滞后,具有较大的不确定性。
现有掘进机大体可分为以下3种情况:
1) 采用悬臂式煤巷掘进机掘进,同时采用便携式单体锚杆钻机进行锚杆支护,这是目前各种煤巷高效掘进方式中使用数量最多的一种,主要用于煤巷顶板支撑强度较差,对空顶距要求严格,需要在掘进后立即进行及时支护的场合[2]。然而,上述方式采用单体锚杆钻机进行锚杆支护,因此,需要人工频繁移动操作锚杆机打单个锚杆孔及紧固锚杆,辅助时间长,占用人员多,工人劳动强度大,支护效率较低。
2) 采用连续采煤机掘进,同时采用车载多臂锚杆钻机进行锚杆支护,锚杆机和连续采煤机分别在两个工作面平行作业,当连续采煤机掘进一定距离后退出到下一条巷道作业,锚杆机立即进入刚开掘的巷道进行支护。
3) 采用进口掘锚一体化机组进行煤巷的掘进与支护,此方式虽可对掘进后的煤巷顶板进行及时支护,但受其结构的影响,其外形尺寸较大,造成工作环境的顶板和地板的承载力较大,同时掘进巷道断面较大,从而限制了该种机械的适用范围[3-4]。该设备价格昂贵,使用成本很高。
1 自动铺轨式全方位支护掘进机的研制
以上不足对企业的工作效率和经济效益有较为严重的影响,直接引起巷道内工作人员长时间较大强度作业时的健康问题。根据现阶段掘进机巷道作业的环境、利用现有条件以及掘进机自身的特点,提出了一种如图1所示的设计方案。

1-炮头;2-液压大臂2;3-液压大臂1;4-旋转台;5-截割臂1;6-铺轨部;7-皮带部;8-轨道;9-行走系统;10-主体部;11-截割臂2;12-铲板;13-推料叶片。图1 掘进机主要结构示意图
自动铺轨式全方位支护掘进机设计结构和思路为:炮头连接于液压大臂2;液压大臂2连接铰接于液压大臂1;液压大臂1连接铰接于旋转台;旋转台转动固定于截割臂2;截割臂2连接于截割臂1;截割臂1连接于车厢部;可实现截割臂2相对于截割臂1的水平伸缩以及截割臂1相对于车厢部的水平伸缩。皮带部和铺轨部连接于车厢部;车厢部固定于行走系统;推料叶片转动固定于铲板;铲板连接铰接于截割臂2。
详细的设计方案为铺轨部由滑轨连接于车厢部内部,其中车厢部前端处有一定距离无地面,便于由铺轨部内部的其中一支机械臂按照预先设计好的距离放置枕木,另一条机械臂则需要进行实时识别枕木与轨道的相对位置是否符合预设位置,并且由第二条机械臂对不符合预设目标的地方进行校正。
轨道输送系统由2条一字型滑轨构成,滑轨呈一定夹角固定于车厢部底部,滑轨前端端口距离宽度等于所铺轨道宽度,滑轨后端端口距离宽度大于所铺轨道宽度。工作时,因为轨道为工字型,可将轨道上端卡入滑轨内,滑轨内设置卡轮,可在不损害轨道质量的条件下,匀速将轨道由车厢部后端输送到车厢部前端的铺轨部下端。再由铺轨部相结合,完成铺轨动作。具体如图2所示。

(a)

(b)
掘进机行驶至工作面适当距离时,第一段截割臂开始向前延展,截割臂底部由液压支架起支撑作用,后第二段截割臂可继续向前延展,并且第二段截割臂底部由液压支架起支撑作用。第二段截割臂前端固定一对炮头、铲板。炮头由两组液压油缸相互配合连接于截割臂前端的支座顶部,连接方式为轴承组固定,可由电气设备控制,使炮头相对于支座做水平方向旋转。如图2所示仅为第二段截割臂向前延伸的示意图。
炮头在工作时,下端铲板可将巷道内部产生的石料等铲起,再由铲板顶端上可旋转的一对收料扇片将石料推至铲板顶端,每个扇片由4张扇叶构成,下端由传动杆推动齿轮使扇片旋转,达到将石料由地面推至接近皮带部处,所述皮带部固定于车厢部两侧,其特征为皮带部前端低于铲板顶部,且置于铲板下端。皮带部后端高于车厢部顶端,皮带部最大长度约等于两段截割臂完全向前延展的长度,可使不干扰前端挖掘工作的同时将多余石料送出。
同时支护工作也将进行,折叠在第二段截割臂内部支护系统将翻出与地面垂直,支护系统间隙配合连接于180°旋转系统上部,180°旋转系统上部两端轴承连接于180°旋转系统下部两端,工作时上下两部闭合状态为一个圆环,非工作状态为下圆环不动,上圆环向后翻转。由此180°旋转系统可直接带动支护系统水平旋转的支护系统180°,可以完成任意面,任意角度全方位支护。具体的支护系统如图3所示。
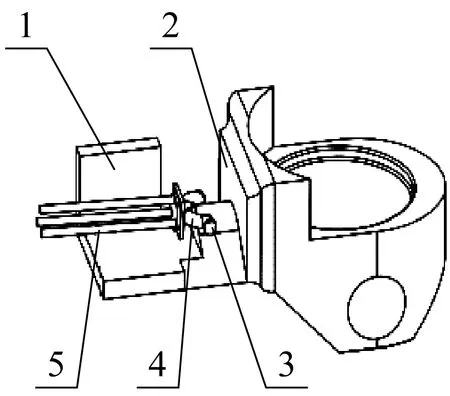
(a)
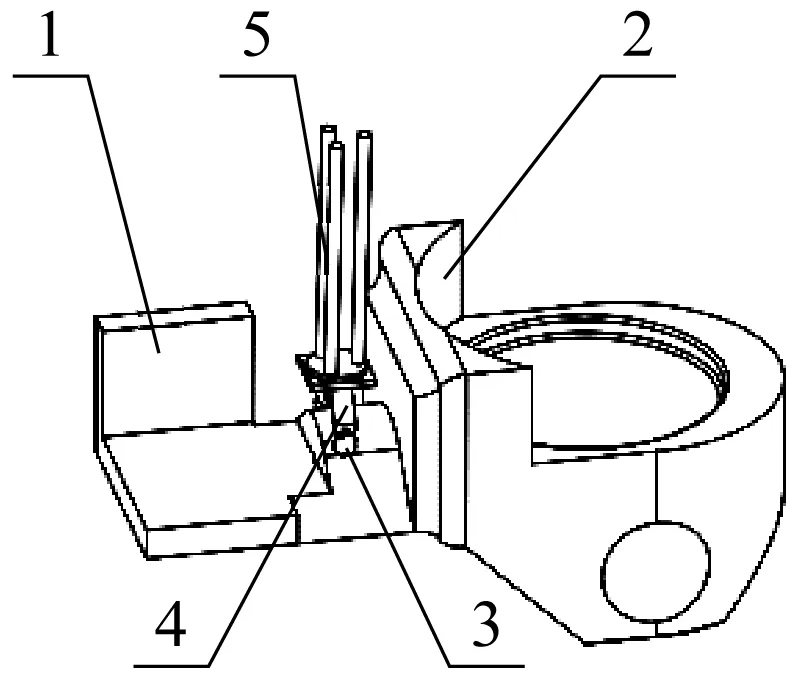
(b)
具体的支护部工作示意图如图4所示,若井下工作环境为拱顶时,支护系统由180°旋转系统上部翻转至工作需要角度,再由180°旋转系统带动支护系统,继续旋转微调至工作需要角度[10]。可将此时拱顶截面处的任意角度,任意位置的支护工作全部完成[11]。避免人工作业时因环境差,矿洞高度较高,工作人员借助其他辅助工具作业而导致的支护精度差、效率慢、质量低的情况。

图4 支护部工作示意图
2 自动铺轨式全方位支护掘进机预期效果
目前市面上采用的非自动铺轨式掘进机无法对巷道后期内铺轨工作起到帮助,并且履带式的行走方式前进缓慢,工作效率差。因不能及时对巷道进行支护作业,不能有效保障一线工作人员的安全,同时也加大了企业的风险,增加了企业的生产成本。
采用自动铺轨式全方位支护掘进机的预期效果分析:同时进行铺轨和挖掘,为后期巷道铺轨作业节约时间和成本;同时进行精准支护和挖掘,提高了施工要求质量,保障了施工人员安全;缩减企业施工成本和施工工期,减少施工人员和劳动强度。
3 结论
本文根据现有技术的掘进机不能对铺轨和支护一体化的施工办法,设计自动铺轨式全方位支护掘进机。所提出的设计方案有效解决了挖掘、支护、铺轨3种工序同时进行的问题,该掘进机能够保证在较低的使用成本的基础上,扩大掘进机的适用范围,在挖掘的同时进行多角度支护和铺设轨道,降低工作人员的劳动强度,提高工作效率[12]。
