手持三维激光扫描仪和移动背包扫描系统在房地一体测量中的应用*
2022-01-18代龙昌施志玲
余 龙,代龙昌,施志玲
(1.昆明市土地开发整理中心,云南 昆明 650228;2.云南省地矿测绘院,云南 昆明 650218)
0 引言
2019年中央一号文件明确提出:加快推进宅基地使用权确权登记颁证工作,力争2020年基本完成。自然资源部要求:2020年底前,完成全国农村地籍调查、农村宅基地和集体建设用地登记率达到80%以上。通过加快农村不动产确权登记,依据法规确保所有农民权益,从而为实现乡村振兴奠定稳固基础。
为此,本文以昆明市盘龙区双龙街道哈马者小组为试点,通过将手持三维激光扫描仪和数字背包扫描系统相结合进行试点测量,探究一个高效可行的农村房地一体不动产权籍调查和测绘方案。
1 两种扫描系统的主要优势
1.1 手持三维激光扫描仪主要优势
BLK2GO依靠点云SLAM算法和相机的视觉定位追踪来实现自身定位。BLK2GO集激光雷达、 SLAM、全景相机、IMU等先进技术于一体,仅以手持的方式就可以将周围环境扫描记录并通过三维点云及高清图像呈现出来。徕卡首次成功将激光SLAM与视觉SLAM融合,推出新型定位技术——GrandSLAM双重定位技术(由激光定位和视觉定位组成,将激光定位、视觉追踪、AI算法有机融合,从而实现高精度自主定位)。相比于传统的SLAM定位技术,GrandSLAM解决了手持移动扫描产品精度低的难题,极大地提高了定位的准确性,保证了数据的精度。GrandSLAM双重定位技术实现高精度自主定位,解决了仅仅依靠GPS才能准确定位区域的数据采集。
1.2 移动背包扫描系统主要优势
Pegasus Backpack是全新移动实景测量背包,配备5个相机和2个激光扫描仪,集成高精度GNSS、IMU惯导系统以及SLAM于一体,使用平板电脑控制系统,采用碳纤维材质和人体工学设计制作而成。
Pegasus Backpack集成了双激光扫描仪,每秒可获取60万点云数据,真实还原三维场景。全方位进行数据采集,所见即所得,扫描无死角;全景相机系统,相机系统拍摄素质高,配备光线传感器,保障图片成像质量。照片与点云实时联动,可在全景照片中直接进行特征物提取;GNSS+IMU惯性导航系统结合SLAM算法,可获取室外5 cm测量精度的数据成果。集成了SLAM定位技术,轻松应对室内和地下空间的数据采集;功能齐全的特征提取软件Mapfactory,支持ArcGIS和AutoCAD双平台,符合传统作业习惯,减少学习成本。具备杆状物半自动提取,生成点云断面图、正射影像,支持导入控制点纠正点云等功能,提供丰富的数据成果。
2 数据采集
在工作过程中,使用数字背包采集视野开阔地的三维点云数据,使用手持三维激光扫描仪采集狭窄区域及围墙内部的三维点云数据。
2.1 设备软件准备
外业采用手持三维激光扫描仪BLK2GO和移动背包扫描系统Pegasus Backpack进行数据采集;内业采用BLK Data Manager、Cyclone REGISTER 360、Pegasus Manager、Leica Infinity、Inertial Explorer 8.70等软件进行点云数据处理,采用EPS3D软件进行数字化制图。
2.2 测区划分
使用SLAM技术进行农村房地一体测量前需要进行测区划分,主要是对测区范围扫描路线进行提前规划,进行测区控制网合理布设,确保扫描路线闭合时间符合相关规定要求,确保点云数据成果精度。确保扫描路线规划前需考虑测区范围内所有需要采集的点云,保证所有测量区域采集的点云都是均匀分布的,同时减少重复路线,减少点云冗余,提高作业效率,防止点云厚度过大。根据前期经验,每个测站时间不能大于25 min,同时不应小于20 min。大于25 min容易出现点云精度超限,小于20 min综合效率较低,而在20~24 min之间的方案较优。
2.3 手持三维激光扫描仪数据采集
2.3.1 外业数据采集
1)外业数据采集流程。按照标准流程进行初始化,按照规划路线进行采集。从一个房间到另一个房间的采集,出门口之前和进门口之后需要停留10 s,保证采集数据全面。若有控制点区域,在经过控制点时要采集控制点。外业采集流程如图1所示。
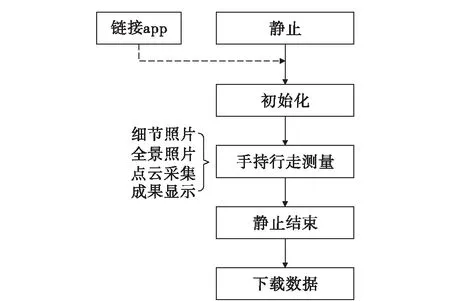
图1 外业数据采集流程Fig.1 Field data acquisition flow
2)项目初勘和规划。外业数据采集之前要对现场进行初勘,目的是规划整个行走路径,使得数据尽可能采集全面,清除行走道路上的障碍物。现场初勘和初步路径规划如图2所示。

图2 初勘和初步路径规划Fig.2 Preliminary survey and path planning
3)数据采集。采集行走路线规划完成之后,将BLK2GO放置到水平放置的台架上,设备初始化完成,并自动开始数据记录。沿规划路线持续行走采集数据,数据记录状态指示灯带一直为闪烁绿色,在数据采集状态下,快速按开机键一次,相机完成一次拍照。数据采集完成后关闭主机。在设备开机后,可通过BLK2GO Live app,连接主机Wifi,实时查看点云数据和照片数据。
2.3.2 内业数据处理
1)数据下载。Type_c线连接设备和电脑,使用BLK Data Manager软件和Re-Scan软件识别到设备后点击Connect,完成后选择扫描的工程文件,进行数据下载。
2)数据导入与浏览。打开Cyclone REGISTER 360软件,创建项目。在Cyclone REGISTER 360软件下找到下载的数据并添加到Cyclone REGISTER360左下栏,选择不勾选自动黑白标靶拼接等步骤,设置全景站点间距为6~10 m。数据导入包含了点云的创建、真彩色附着。数据导入完成后即为真彩色三维点云数据,在Cyclone REGISTER 360软件中可以进行站点模式、切片模式、测站模式3种方式浏览查看点云数据。测站某视图全景+点云图如图3所示。

图3 测站某视图全景和点云Fig.3 Panorama and point clouds of a view in a station
3)数据输出。按需求输出需要的点云格式,设置数据发布选项,选择自己想要输出的数据格式,点击发布即可。
2.4 移动背包扫描系统数据采集
2.4.1 外业采集
外业数据采集过程主要包括设备安装、设备初始化、设备参数设置和连续采集数据等过程。先将Pegasus Backpack放置在空旷场地,静态观测5 min,再动态初始化5 min,动态初始化包括直线加速、∞字绕行及静止状态,以校准IMU,按照前期规划号的路线尽量选择GNSS信号好的地方,尽量避开影响GNSS信号的遮挡物,在数据采集过程中遇到信号弱的区域,Pegasus Backpack使用SLAM算法辅助完成定位和定向。
2.4.2 内业数据处理
1)数据导出
将移动硬盘插入背包的USB接口,使用平板远程控制下载背包数据。GPSINS为原始轨迹文件夹,Scanfiles为原始扫描数据文件夹,WalkA为原始影像数据文件夹,Log为日志文件夹,Calibration为检校文件夹。
2)数据准备
在GPSINS文件夹下,新建master文件夹,存储基准站数据。注意:基站设置距离测区最远为20 km,为保证获得更好的精度建议设置在5 km内。
3)轨迹解算
使用Inertial Explorer 轨迹解算软件,选择File-Convert-Raw GNSS to GPB,选择GetFolder找到原始数据文件夹/GPSINS,执行Auto Add Recursively,其中Rinex为基站。然后点击Convert转换全部基站和背包的数据。导出合并后的轨迹数据,存储在与Master同级根目录下。点File-New Project-Empty Project,在相应的项目工程-GPSINS文件夹下创建项目,输入“项目名称”。基站数据添加后,需要设置的内容有精确的经纬度和椭球高,检查基站天线的类型和仪器高,其中Measured height为垂高,Applied height为最终使用的计算到相位中心的真实天线高度,选择Measured heigh量到天线底部或相位中心。项目建立完成后,确定基站数据的时间是否包含了背包采集的时间。
打开软件选择Process-Process TC(Tightly coupled),TC设置的General选项卡下只设置Elevation mask为10deg。若基站支持很多卫星,将Enable QZSS和Enable Galileo关掉,设置完整个TC,点击Process进行轨迹的解算,点击Plot Results,在选项卡ALL下进行分析计算。在GNSS固定的前提下,轨迹前后解算的分离结果不会出现非常大的数值如超过1 m,有个别凸起异常值属于正常,一般最大数据控制在0.15到0.2为正常;轨迹解算完成会自动在GPSINS文件夹下生成轨迹解算结果XXX.cts文件,用于点云解算。
4)建立坐标系
在进行点云和影像处理前,需建立WGS-84到工程坐标系的投影坐标系。使用七参数进行坐标转换,已知测区内的4对点,即WGS-84经纬度椭球高与本地平面坐标,则可通过计算七参数方式进行定义坐标系统。七参数法至少需要4对点,且点的分布要覆盖整个测区,两套三维坐标为WGS-84坐标和本地坐标,控制点要求为高精度点,不能是RTK点。然后将WGS-84坐标点号,经纬度和高的列信息对应导入点坐标,使用同样方法导入地方坐标。设置好后进行点的匹配,在 system A 中选择下拉框的项目名称,则会自动匹配到导入的平面坐标的点信息;然后在左右两个选项框内选中对应的点,点击箭头对同名点进行匹配,显示出残差值。然后回到 Coordinate system manager 界面,找到该坐标系统,点击右侧边栏的 export to global,将该坐标系统复制到整个 infinity 的数据库里,这样即可被 Pegasus Manager 所访问。
5)AutoP 软件自动挂机处理点云和照片
导入点云文件,设置 Min intensity为相应的数值,正常采集数值设置为 5~8,当采集的任务的环境比较潮湿和有大面积水时设置为 2,有大雾或者早晨的采集环境时设置为3 或 4。
SLAM解算,设置Basic SLAM,勾选Height Constraint。先解算完 BasicSLAM后再解算AdvanceSLAM,处理完成后,在GPSINS中生成 BasicSLAM 和 AdvancedSLAM两条轨迹文件。
挂机生成三维点云数据,在解算完 SLAM 后就可以进行一键挂机全部的操作,并先对一些参数进行设置。导入轨迹数据的参数设置,选中 Import trajectory data,点击 parameters进行设置,此处轨迹的选择直接点击Basic或Advance。
设置完所有的参数后,点击Process,在弹出的界面中,选择在infinity 中已建好的目标坐标系,点击 OK,程序运行,完成点云数据处理。
局部点云如图4所示。

图4 局部点云Fig.4 Local point clouds
3 点云数据融合关键技术分析
点云数据融合是将手持三维激光扫描仪BLK2GO和移动背包扫描系统Pegasus Backpack扫描的点云数据经过点云剔除、噪声点去除、三维模型表面修复后,统一为Cyclone REGISTER 360软件能打开的las格式,以移动背包扫描系统的点云数据为基准成果数据,将手持三维激光扫描仪点云数据根据同名点粗略融合。使用方法为统一坐标系法与改进ICP算法融合多点云,统一坐标系法解决数据相距较远的问题,对多点云数据进行粗略融合。
点云数据融合建模步骤如下:
1)使用统一坐标系法进行“点云+点云”的粗略融合。
2)使用改进ICP算法进行“点云+点云”的精细融合。
3)对融合完成的三维模型进行表面修复。
4 结束语
随着三维激光扫描技术的发展及推广,其被广泛应用于不同的领域。随着手持式激光扫描系统的集成化和小型化,越来越多的人感受到它的高效方便。手持三维激光扫描技术与移动背包扫描系统可以生成3D立体点云数据,将房地一体目标物各个部位和结构完整呈现,并能通过专业软件直接在点云数据上进行绘图生产。这种测量技术手段大大缩短了外业作业时间,提高了工作效率,数据成果精度完全能够满足规范要求,数据成果也更加立体准确,为更快完成农村房地一体测量、不动产三维数据管理、实景三维的建设提供了一种行之有效的技术思路和解决方案。