风力发电机组偏航系统控制算法仿真设计
2022-01-18彭定杰兰杰林淑
彭定杰兰杰林淑
(1.东方电气新能科技(成都)有限公司,四川 成都,610036;2.东方电气风电股份有限公司,四川 德阳,618000)
0 引言
风能作为一种储量丰富、清洁可再生能源,受到了世界各国的高度重视[1]。风作为自然界的产物,具有随机性,风向不断变化。为提高风能利用,偏航控制系统成为水平轴风力发电机组控制系统的重要组成部分。对于目前主流的MW级上风向风力发电机组,为了提高风能利用率,都配备了主动偏航控制系统,由位于下风向的风向标获取风向信息,输入偏航控制系统,控制风轮对风,提高风能利用率。
大部分商业化的风力发电机组偏航控制系统较为简单,主要采用偏航误差角度θ和延时阈值T进行控制,当风向误差角度θ大于阈值θt且持续时间T超过Td后,启动偏航对风,但是由于风向变化的随机性,和不同风速下的风向统计分布特性不完全相同,因此,简单的偏航控制算法并不能有效对风。
为了提高对风效率,偏航控制算法近年来受到了广泛关注,文献[2]提出了一种不需要风向传感器的爬山控制算法(Hill Climbing Control-HCC),该算法是一种局部优化方案,通过不断比较相邻点功率偏差来决定下一步的偏航动作,但是风向极端变化时,很难通过局部的搜索来实现正确的偏航。文献[3]结合了爬山法和风向标提出了VANE-HILL CLIMBING(V-HC)算法,该算法认为当风向偏差大于15°时[4],采用传统偏航控制方案,当风向偏差小于15°时,采用爬山算法来精确对风,但是由于实际的风况是随机变化,因此测量的功率也会随机变化,使得爬山算法可能控制偏航机构频繁动作,增加了偏向系统的磨损。文献[5]提出了在爬山法进行精确对风的过程中,对风向采用卡尔曼滤波器,预测风向,在提高系统对风精度的情况下降低偏航系统的频繁动作。此外,为了有效控制偏航系统,还有模糊控制[6]和鲁棒控制[7]等。
但是文献[2~4]需要同时测量风速来计算当前的最大可利用功率,而风速的测量也会受到风轮旋转尾流的影响,因此采用爬山法类似的方法并不能排除尾流对偏航控制的影响。另外文献[2~5]均未考虑实际商业风力发电机组的偏航控制系统并不是一个动态系统,实际风力发电机组偏航执行器只存在3种动作:静止、顺时针偏航5和逆时针偏航,且在顺时针和逆时针偏航过程中均以固定速率进行偏航。因此文献[5]的卡尔曼滤波调整动态阻尼并不能应用于固定速率的偏航系统。
本文以FD93H机组模型为例,在对传统风向标偏航控制算法功率损失分析进行深入分析的基础上,从控制系统的角度出发,抽象出偏航系统的模型,结合风力发电机组偏航系统自身特性,设计了变增益的PI控制器,分析了系统的稳定性、稳态性能,验证了所设计控制器的正确性,通过对比所设计的偏航算法可以有效增加系统的输出功率。
1 功率损失分析
以FD93H机组模型为例,机组参数见表1。

表1 FD93H机组参数
IEC标准A类湍流定义的一年一遇极端风向变化(EDC1)见式(1)。

假设:风速不变,仅风向发生变化;风向服从正态分布;风功率与风向服从cos2θ关系,即P=Pmax×cos2θ;正常运行时风向99%位于[-θeN,+θeN];计算不同风速下的EDC1,并按照上述假设拟合出相应的方差值,见表2。

表2 不同风速下EDC1计算结果
得到的正态概率分布如图1所示。

图1 不同风速下风向正态概率密度
采用蒙特卡罗方法进行大量数值模拟,在风速不变时,计算其理论平均功率值,通过计算结果可知,当N>100 000时,能够保证小数点后2位数值精度。

当正态分布的均值υ取不同值时,可得到不同的结果,见表3。

表3 平均风速v分别为3 m/s、5 m/s、10 m/s时的风向偏差对应功率损失
大于10 m/s风速以后,风机到达额定功率,功率不存在损失,载荷有影响。从表3可得出:
(1)在风速不变、平均偏航误差为0°的情况下,也不能达到100%的风能吸收率,总会由于风向随机变化而导致风能吸收率降低,风速越低,风向变化范围越大,功率损失越多,见表4。

表4 随机风向变化造成功率损失
(2)当平均偏航误差变大时,风能吸收率会进一步降低,当风速不同时,降低1%和3%的风向偏差各不相同,见表5。

表5 风向偏差造成功率损失
理想情况下,风机能够及时偏航,实现实时对风,这样即能达到100%风能吸收,但实际机舱和风轮的巨大惯性使其不可能实现,造成了功率损失,且频繁偏航动作,对偏航机械系统磨损严重,反而降低了风机的使用寿命,得不偿失。因此有必要设计好的偏航控制算法来提高对风效率,增加功率输出。
2 偏航系统模型
偏航系统又可称为对风装置,通常由偏航驱动装置、偏航制动器、偏航传动装置、风速风向计、偏航轴承、偏航计数器、电缆保护装置等重要部分组成。其中依靠风力通过相应机构完成机组对风的动作成为被动偏航,而主动偏航则是通过图2所示的模型框图来动作,偏航系统一般由控制器、执行器、功率放大器等部分组成。

图2 偏航系统模型框图
合并图2中的2个综合点,得到图3所示等效偏航系统模型框图。

图3 偏航系统等效模型框图
偏航控制系统的工作原理:由风向标传感器采集风向变化数据,然后传递到偏航控制器中,首先进行数据处理,然后以处理后的数据作为参考标准做出判断,给出是否偏航以及偏航方向的指令,最终达到机舱正对风目的,可用图4的系统特性来表示。

图4 偏航执行器特性曲线
结合图3和图4,并对偏航执行器输出偏航速率进行积分就得到机舱角度,如图5所示。

图5 偏航系统抽象模型框图
设计的变增益PI偏航控制如图6所示。
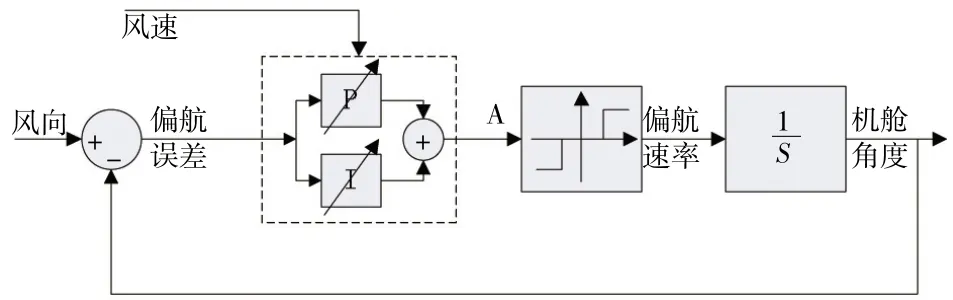
图6 变增益PI偏航控制器框图
图6虚线框内就是本文所涉及的偏航控制器,变增益PI控制器的参数受风速影响。
3 系统稳定性分析
假设初始时机舱角度和风向相同,即认为初始时刻风向和机舱角度均为0°,在t0风速不变,风向产生一个阶跃变化θ×u(t-t0),其中u(t)为单位阶跃函数,如图7所示。

图7 风向阶跃输入
由图4偏航执行器特性可知,只有当PI控制器输出大于一定阈值才能启动偏航对风,因此在偏航未启动前,可以认为图6中A点断开,机舱角度不发生变换,则控制器的输入为

式中:ye表示偏航误差;θ表示阶跃幅值;Kp,Ki分别表示PI控制器比例和积分增益系数;t0表示阶跃输入产生时刻。
求出式(4)的时域表达式为

由式(5)可知,因积分项的存在,因此无论多小的阶跃输入值,均可以达到偏航执行器动作的阈值。当PI控制器输出在t1时刻到达偏航执行器的动作阈值后,偏航执行器以固定速率R进行偏航动作,在偏航动作期间,也可认为图6中A点断开,但此时控制器的输入变为

式中:t1表示偏航执行器开始动作时刻;R表示偏航执行器速率。
求出式(5)的时域表达式为

比较式(5)和式(7)可知,由于偏航执行器动作,使得偏航误差ye(t)逐渐减小最终趋于偏航执行器停止的阈值范围内,然后又重复式(4~7)的过程,直至最终偏航误差趋于零,因此整个控制系统是稳定的,且其稳态误差为零。
4 仿真分析
通过matlab/simulink仿真分析验证了上述分析过程。
从图8可以看出,风向5°阶跃时,由于偏航误差值较小,需要通过一段时间积分才能达到偏航执行器启动阈值;当风向10°阶跃时,偏航误差值较大,立即启动了偏航执行,验证了所设计控制系统的稳定性。

图8 风向5°、10°阶跃响应
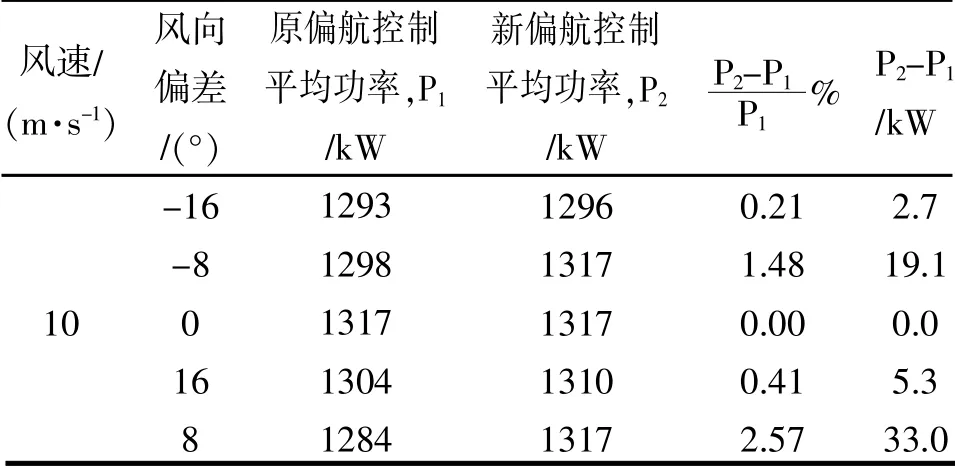
同时通过Bladed软件进行仿真计算,按照IEC61400-1-2005标准S类安全等级设计载荷工况,得出功率对比,见表6。

表6 功率对比
续表6
可知,当低于额定风速时,风向偏差较大时,新偏航控制算法能够有效提高对风效率,从而提升发电量。
5 结论
本文以FD93H机组模型为例,在对传统风向标偏航控制算法功率损失分析进行深入分析的基础上,从控制系统的角度出发,抽象出偏航系统的模型,结合风力发电机组偏航系统自身特性,设计了变增益的PI控制器,分析了系统的稳定性、稳态性能,验证了所设计控制器的正确性,通过仿真对比所设计的偏航算法可以有效增加系统的输出功率。
