基于GE·WDR 技术的水面垃圾清理装置设计
2022-01-18张皓东王玉勤倪小强韩志博张恒
张皓东 王玉勤* 倪小强 韩志博 张恒
(巢湖学院机械工程学院,安徽 巢湖 238000)
由于居民环保意识的缺乏,乱扔垃圾的现象普遍存在,很多垃圾直接或者间接的进入江、河、湖、海,造成严重的水污染环境[1]。传统的水面垃圾清理主要是依靠人力方式打捞,打捞效率较低,且存在一定的安全隐患[2-4]。目前较为流行且不需要人工干预的国外“自吸式水上垃圾桶”自动清扫系统,其工作原理是利用水基于表面张力的潮汐力原理,在河面形成涡旋系统,将漂浮在河面上的塑料瓶、树叶等垃圾收集到桶内。但该水体清洁系统没有驱动装置,设备需放置在固定水域,移动性能差,特别是在恶劣条件下,无法对集中区域的垃圾进行有效收集,工作效率低,能量消耗大。针对上述问题,基于GE·WDR(地面设备·无线数传电台,Ground Equipment·Wireless Digital Radio)技术,设计了一种水面垃圾清理装置,该装置实现了人船分离的打捞模式,可以自动捕捉水面信息,合理规划路径,及时打捞水面垃圾。该产品适用于城市内河、旅游景区内河、江河湖泊等水域的垃圾清理,具有一定的市场应用前景。
1 GE·WDR 水面垃圾清理装置结构设计
GE·WDR 水面垃圾清理装置由减阴升降装置、垃圾收集装置、遥控行进装置等组成,是一款智能化水面垃圾处理装置,其整体结构示意图如图1 所示。该装置集成了图像传输自动导航系统和水面垃圾监测系统,通过无线摄像及传输,操作人员可以观察到水面垃圾,实现远程操控船体驶向垃圾水域并自动清理垃圾,并实时传输回水面垃圾的污染及打捞情况。在使用过程中,利用丝杠带动收集装置上移减少水阴,电机驱动螺旋桨行至目标水域。当船体到达工作区域,再次通过丝杠带动收集装置下移,使传送带最低端潜入水面,通过收拢装置将垃圾聚拢至船体前方,并通过传送带运输垃圾落入收集箱内。在垃圾收集装置和驱动装置的联合运行下,保证装置及时、高效的开展水面垃圾收集工作。
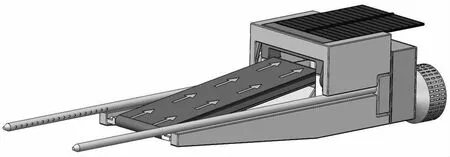
图1 GE·WDR 水面垃圾清理装置整体示意图
2 主要部件设计
2.1 减阴升降装置设计
为减少水面的阴力,降低对能量的消耗,设计一种可控的升降装置。该装置由底座、滚珠丝杠、减速机、支撑架和储物箱等组成,具体如图2 所示。为提高丝杠装置的稳定性,在其底部加宽了桩体与机器底座的接触面积。丝杆升降机由蜗轮减速机和丝杆组成,利用蜗杆带动蜗轮实现减速。蜗轮中间攻有内螺纹,升降丝杆和内螺纹啮合传动。丝杆升降机的升降速度等于蜗杆输入转速除以蜗轮蜗杆的减速比再乘以升降丝杆的螺距。为提高升降装置的使用寿命和稳定性,滚珠丝杆升降机采用润滑脂润滑。
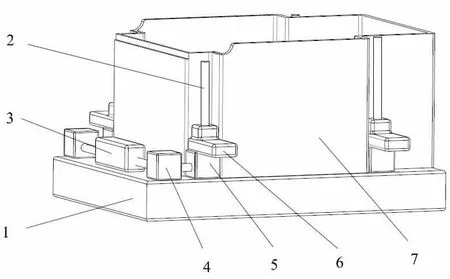
图2 减阴升降装置示意图
2.2 垃圾收集装置设计
垃圾收集装置由储存收集箱、喷气管、气泵、太阳能板、储能蓄电池、传送带、加热片、皮带、转轴、电动机和太阳能板支撑底座等组成。储存箱内部采用光滑斜面设计,便于收集垃圾。喷气管通过气泵对水面垃圾进行切割与聚集,利用传送带传将垃圾运送至收集箱内。传送带借助加热片、皮带和转轴等零件实现垃圾的运输和收集功能,其中皮带与转轴相结合,通过电机带动转轴运转,皮带带动传送带转动。传送带有一定的摩擦系数,防止皮带打滑。传送带间嵌入一定量的加热片,当垃圾经过传动带运输时,加热片对垃圾进行加热,防止垃圾与传输带粘粘的粘连性,以便垃圾快速落入储存箱中。
为积极响应国家“碳达峰、碳中和”的战略发展要求,在船体上设置一面可感光太阳能板,利用光伏发电功能配合感光头实现热能转化成电能,为设备提供干净能源,保证船体能够持续工作。
2.3 遥控驱动装置设计
驱动部分主要由螺旋桨[5]、圆筒形保护罩、电机等组成,如图3 所示。通过电机带动螺旋桨转动,驱动整个装置向前移动,提高了垃圾收集的速度和效率。螺旋桨安装在设备尾部,左右各一个。螺旋桨周围装有圆筒形保护罩,提高了设备运行的稳定性,减少了不必要的资源浪费。螺旋桨桨叶长度为120mm,螺旋桨总直径(D)为255mm,桨毂直径为150mm,叶数目(B)为5 条,实度(σ)系数为0.24,桨叶角(β)为10°,几何螺距(H)为62mm,实际螺距(Hg)为56mm。
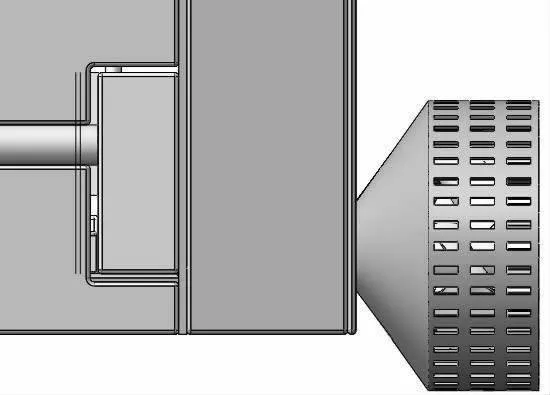
图3 驱动装置示意图
2.4 路径规划设计
GE·WDR 水面垃圾清理装置在工作时,通过无线传播摄像头、超声波传感器对目标水域进行扫描并采集相关水域信息。当设备接收到数据后,通过栅格法将目标水域分为多个矩形区域,计算出路径最优解,设备在矩形区域内进行S 型路径规划[6,7],其设计模型如图4 所示。当设备搜寻到拐角处,自动调整角度,沿着一定的弧度转弯运行,其弯道路径模型如图5 所示。同时在每个矩形区域设置有PIT(保养站,Pit Stop),及时清理收集装置中的垃圾,保证下次水域收集工作的顺利进行,装置在PIT内停留时间依照保养条例弹性变化。
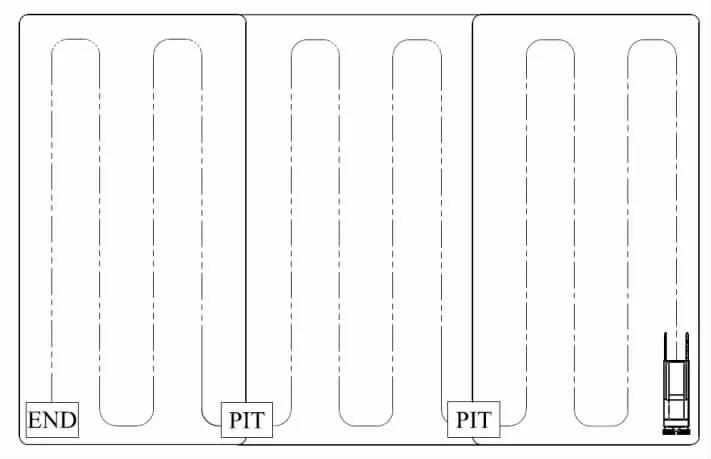
图4 装置路径规划设计模型
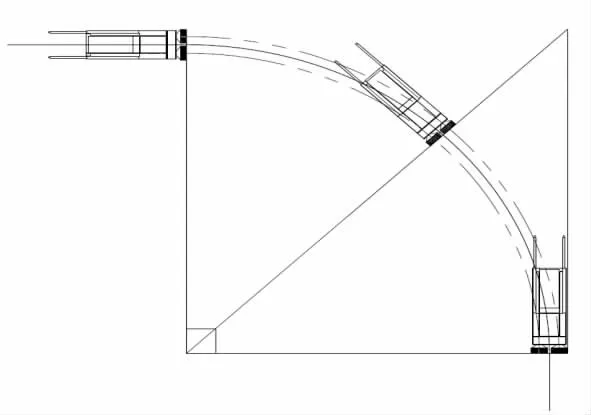
图5 装置模拟弯道路径模型
3 样机制作
根据上述设计方案,制作如图6 所示的样机。本装置要求通过气流切割水面垃圾并聚集至传送带前部,由传送装置完成垃圾收集。实物装置依靠六颗EPS 泡沫浮筒提供浮力,四根直径24mm 的TBI 滚珠丝杆与套筒参与减阴升降装置整体运动,采用双气泵管道结构聚集垃圾。垃圾传送装置选取额定功率65W 减速机,依靠半径300mm 正反浆提供推进动力,转速可达每分钟两千转。2 块额定功率200W 最大温度250℃硅橡胶加热片对称排列在传送跑板内部对水垃圾进行加热,减少水垃圾与传送带的粘连性。290°云台角+70°的视觉识别摄像头采集水面环境数据信息,10 块长200mm,宽50mm,12 伏65 安时光伏板辅助装置供能。装置于水接触部分采用双层2.4mm 厚度高分子防水卷材,在对装置框架的选材时着重于材料的抗压性。采用插接螺旋环接口式传送带传递垃圾,传送带材料优先选取抗腐蚀性pvc 花纹网带。经过硬件和软件两部分的调试,所设计的样机实现了水面垃圾收集的功能,达到预期的设计目标。
4 创新性
4.1 集中收集处理:为提高收集效率,设备安装有小型气泵,与设备前方聚集管配合,聚集管内测有若干个气孔,可以快速聚集两杆之间的垃圾,便于传送带快速收集。
4.2 环境适用性广泛:储存箱的四周安装有特殊设计的丝杠结构,通过它能够控制传送带的升降,保证装置适应各种不同的水域条件,实现对水面垃圾的高效分割收集。
4.3 续航性能优越:为使机器能够持续工作,本装置在储存箱的上面装有太阳能电池板,持续提供电能,保证设备持续运行。
4.4 维护的便捷性:本装置采用可拆卸的机械零件,便于设备的装配安装以及后续的维护与升级。
5 结论
GE·WDR 水面垃圾清理装置具备自动导航、视觉识别以及智能控制等功能。设备配备有遥控行进装置和减阴升降装置,可以自行规划路径,开展全天候、全方位、全覆盖式垃圾收集工作,减少了人工参与度,提高了设备自动化、智能化水平。所设计的垃圾清理装置拥有自主知识产权,具有工作效率高、稳定性强、维护便捷等特点,对生态环境的保护具有重要的促进作用。
