基于FPGA 的站台门集成控制器的设计
2022-01-18李杰崔健东
李杰 崔健东
(1、今创集团股份有限公司,江苏 常州 213000 2、中车长春轨道客车股份有限公司,吉林 长春 130000)
为保证有效地将候车乘客与轨道隔离,且能节约空调通风系统的电能消耗,需要将轨道交通站台门系统安装在地铁等城市轨道交通站台上。作为站台上的关键部件,站台门在车辆的运营过程中起着重要的作用,特别是站台门的控制系统,无论其外部的信号错误还是内部元器件失效,都可能对车辆的运营秩序产生重大影响。到站时,站台门如不能正常开闭,会对乘客的上下车产生影响。在车辆行驶期间,站台门更不能意外打开,否则将严重威胁乘客的人身安全。为此,站台门及其控制系统的设计研发已经成为轨道交通设计的重要内容[1-2]。
1 站台门集成控制器结构设计
为了尽可能压缩系统冗余,本文提出了一款站台门集成控制系统。系统将4 个单元的所有车门集成在一台控制器内完成。系统中,控制器检测所有车辆和控制系统信号,对所有车门进行控制,4 个单元门只有一台控制器,不再需要多个控制器之间的数据通信。系统大大简化了信号检测、数据通信和电机控制功能的实现,见图1。
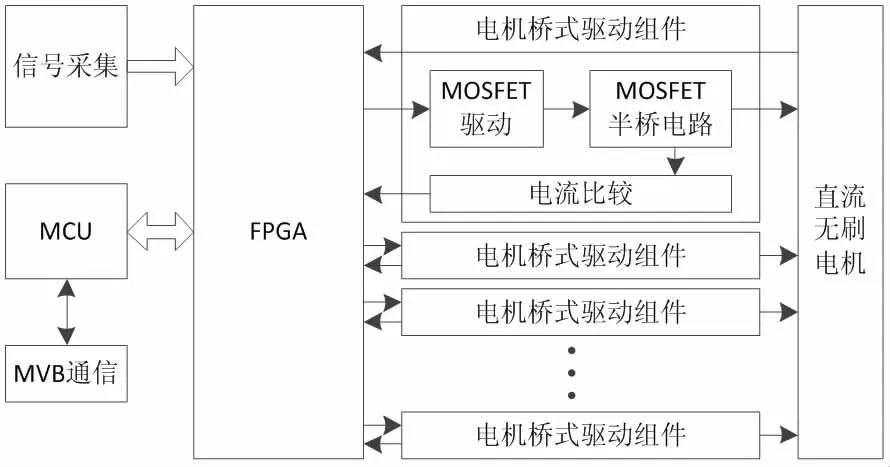
图1 门控器系统结构
单元门内所有需检测的信号和被控电机的数量较多,需要大量的硬件资源,这是系统设计中最主要的挑战。当前市场上的主流单片机无法提供如此规模的硬件资源,为此,本文中系统利用FPGA 实现信号采集和电机控制。
各控制板由微处理器、FPGA、若干直流无刷电机功率变换器、电机驱动开关阵列和电机驱动电压监测电路构成。其中微处理器响应主控机的控制信号和控制指令,根据站台门位置信息产生相应的电机正转、反转以及速度控制信号;系统核心门控制和冗余依靠可靠性较高的FPGA 实现。FPGA 响应开关门和速度控制信号,结合电机转子位置,根据直流无刷电机控制逻辑产生功率变换器各开关管的通断斩波控制信号;采用MOSFET 三相全桥结构构成功率变换器,利用自举式电机控制芯片驱动开关MOSFET。
FPGA 承担了门机构的各项控制任务,其内部利用VerilogHDL 实现所有工作模块,见图2。

图2 FPGA 内部软件结构
2 状态控制
FPGA 的输入信号包括:电机霍尔位置信号,电机过流信号以及各种本地、控制信号,根据这些信号的状态控制门机构的工作状态。由此,FPGA 内部实现了各个门机构的状态机,包括门锁闭、正在开门、正在关门、门全开以及关门障碍等状态,这些状态之间根据控制信号、本地信号、电机过流信号和门位置实现状态迁移,见图3。
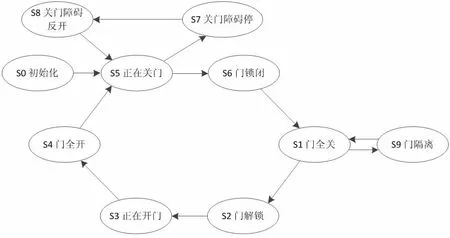
图3 系统状态机
对于这些开关信号,FPGA 保持较高的采样率,并进行适当的消抖处理以获得尽可能高的系统可靠性。消抖逻辑为对输入信号进行连续检测,当输入有效时对时钟计数,无效时计数器清0。当计数器计数值足够大,也就是连续有足够多的有效信号输入时判定输入信号有效。
各状态下,控制器控制电机、门锁执行相应动作。正在开门状态和关门障碍反开状态下电机正转,正在关门状态下电机反转,其它状态电机停转。门锁闭状态执行锁门动作,门解锁状态执行解锁动作,其它状态下则保持门锁状态不变。
3 电机的控制与驱动模块
电控站台门采用三相直流无刷电机实现门体的运动控制。电机需利用三相桥式电路进行驱动,同时利用霍尔传感器检测电机转子位置,反馈至控制器。当前我国地铁列车包括每节车厢3 对和4 对车门两类结构。本系统按照4 对车门进行设计,即控制器需要4 组桥式电机驱动电路,每组桥式电路包含3 路由两支MOSFET 及相应驱动器构成的桥臂电路。整体电路共需12路结构、功能基本一致且相对独立的桥臂电路。
图4 给出了一路独立桥臂电路,其中HIN、LIN 为桥臂上管、下管控制信号,经利用自举式电机控制芯片IRF2113 实现悬浮电平变换分别控制相应MOSFET。
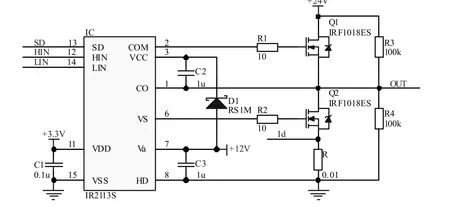
图4 电机桥式驱动电路
系统利用FPGA 建立相应的相位控制逻辑,根据三相位置信号、正反转和转速控制信号以及各桥臂过流监测信号的状态产生各开关控制信号。根据每个电机的120°霍尔传感器输出的三相位置信号可以得到相应的上、下开关管控制信号,其逻辑关系如表1 所示。
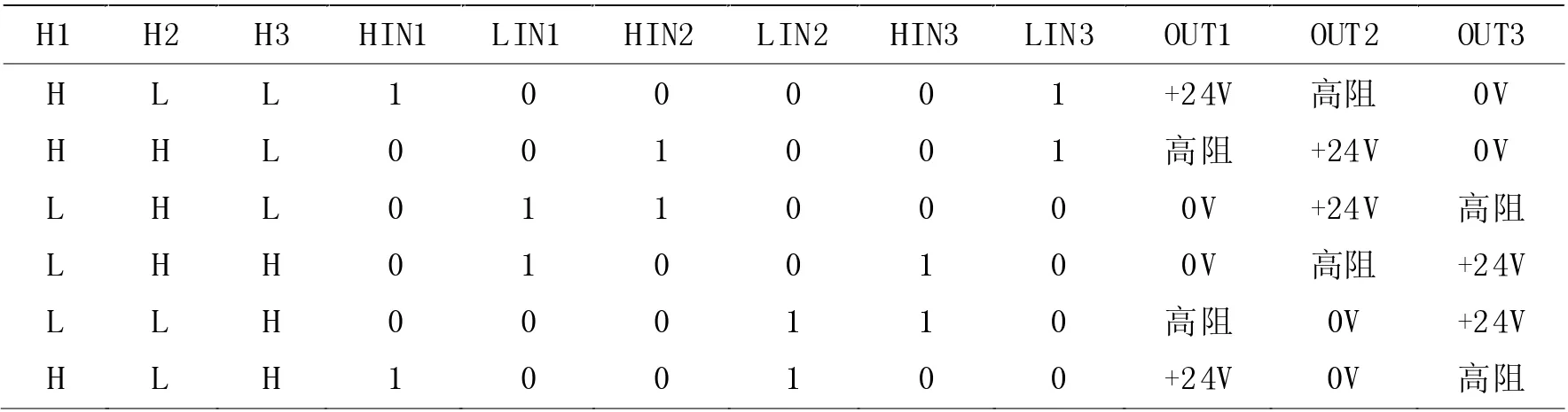
表1 电机相位控制逻辑
为保证IRF2113 自举电路的正常工作,上管导通期间须进行斩波控制,因此电机调速控制即采用PWM信号各上管进行斩波。在对上管进行斩波控制的同时,对下管进行互补斩波控制,以提高电路效率。
由此可得FPGA 的输出控制信号与霍尔信号、PWM信号之间的逻辑关系为:
HIN1 = H1 & (~H2) & qh;
LIN1 = ((~H1) & H2) | (H1 & (~H2) & ql);
HIN2 = H2 & (~H3) & qh;
LIN2 = ((~H2) & H3) | (H2 & (~H3) & ql);
HIN3 = H3 & (~H1) & qh;
LIN3 = ((~H3) & H1) | (H3 & (~H1) & ql);
进一步结合电机过流信号,当Io 信号为高时,控制逻辑即关闭PWM信号,所有桥臂的开关电路断开,电机停转。
4 门速度控制逻辑模块
控制器根据预设的速度曲线控制电机的旋转,速度跟踪控制采用利用FPGA 实现的PI 算法。FPGA 内部系统首先利用电机转子信号测算出门的运动速度,代入PI 控制器,根据实测速度与给定曲线之间的偏差计算出相应的PWM信号占空比。
FPGA 内部系统以三相位置信号为时钟闸门信号,利用定时器检测闸门开启时间,取其倒数得到门运动速度。系统在捕获三相位置信号的同时进行加减计数,获得门位置,并以此为依据查找速度曲线数据表得到给定速度。PI 控制器结构如图5所示[7]。
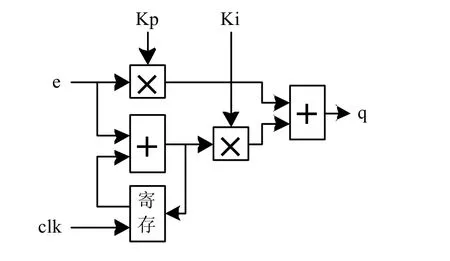
图5 PI 控制器模块
5 测试与试验
利用上面的设计,利用Xilinx 出品的xc3s500e 型FPGA 构造了集成门控器,并对设计尽心各类仿真实验。大时间尺度上霍尔位置信号与各输出控制信号之间的对应关系与设计一致。
针对门速度跟踪PI 控制器,同样针对上面的设计进行了相应的控制实验。
6 结论
本文给出了一种基于FPGA 的集成式站台门门控器设计方案,4 个单元只需配置一台门控器。控制器获取列车控制信号以及各车门位置、电流信号,利用FPGA 实现车门的各种控制逻辑与算法。对所设计控制器的仿真与实验表明了该方案的正确性,与传统分布式系统相比,集成控制器复杂度大幅降低,有利于降低成本,提高可靠性。
