一种基于光反射与透射及物联网技术的动态颜色监测系统*
2022-01-17王志新钟睿芸李月娥
王志新钟睿芸李月娥
(兰州大学信息科学与工程学院,甘肃 兰州 730000)
颜色的产生源于物体对光的选择性吸收,随着近代科学特别是色度学的发展,颜色成为一种可被客观定义的事物,而且广泛用于生物、化学、材料学的科学研究中[1-4]。在传统的如印染业、酿造业、污水处理业等涉及化学变化的行业,复杂的生产流程中需要对每个环节的颜色和其他生产元素进行实时监测和控制。但是目前国内大部分生产厂家还是依靠工程师和老技术工人们的经验来进行生产,很难将颜色的实时定量监测应用到生产过程中去[5]。近年来利用光电积分法(Photoelectric integration),分光光度法(spectrophotometry)原理所制造电子检测仪的出现为颜色检测的自动化,标准化,高效化提供了基础[6]。
相对于其他大型化智能设备的使用,目前存在的颜色检测设备还有待提高。第一,严格要求的外部条件。现在使用的识别方案是根据Swain和Ballard[7]提出的颜色直方图来表示和匹配图像。这项工作为颜色识别做出了重大贡献,然而当照明条件不相等时物体识别精度显著降低。第二,检测样品的色彩分布要求是线性均匀的。实验中通过大量样本建立起来的标准色与实际使用中的样本差距可能很大,实际数据库中可能根本没有这种颜色,这也直接导致基于此原理的仪器只能针对特定颜色色调的物品。华中科技大学胡雪婷等报道了基于图像识别的吸蓝量滴定终点自动判定新方法[8],武汉科技大学的研究团队提出了颜色检测和人机交互的高效破碎玻璃分选装置[9],通过图像处理达到颜色识别的目的需要,但建模要求较高且对RGB采集设备要求过高,不能大范围普及。
颜色检测技术在多领域不断发展,如Funt和Finlayson根据Land的理论对其方法进行了扩展,通过索引从邻近点计算的颜色比率来实现颜色检测[8,10-11]。辽宁技术大学团队研发的膨润土吸蓝量自动分析检测技术,在带有筛网和滤纸的超声波分散器中投放给定光从而检测绿色晕环[12]。中山大学谭洪舟团队和南京理工大学胡茂海团队用颜色传感器对滴定过程中的颜色进行检测[13-14],提供了根据滴定曲线自动判断滴定终点的实现方法。但在液体颜色检测方面,检测对象几何形状和表面材质等因素的影响依然存在,同时试图利用单一数字标尺描述颜色可能产生错误[15-16]。本文提出并实现了一种基于光反射与透射及物联网技术的动态颜色监测系统,提供了一种在实验室和工厂中智能化过程监测的新思路,有望实现工作效率与操作精度的提高,填补国内相关设备的空白。
1 颜色监测系统设计
RGB检测模块选用TCS230传感器[17],如图1所示。将RGB检测模块与光强检测模块合并成一个整体传感器,该传感器把可配置的硅光电二极管与电流频率转换器集成在一个单一的CMOS电路上,同时在单一芯片上集成了RGB三种滤光器,芯片集成了模数转换器(Analog-to-Digital Converter,ADC),最高采样频率500 KSPS,最高支持10通道的模拟信号采集,采用8引脚的SOIC表面贴装式封装。两个整体传感器对称放置,中间设置有遮光光路及放置待测物体的平台,可以实时监测待测物体的颜色,并转化为RGB值,同时检测待测物体的透光性及环境光强,满足光学检测的信号采集对于采样精度和采样频率的要求。RGB检测模块与光强检测模块理论相似,将透射或反射的光分别透过对应的光透镜,频率转换器根据透过透镜光颜色和光强的不同输出不同频率的方波,通过模数转换和归一化计算即可得到待测数值。

图1 TCS230传感器示意图
将传感器如图2排布,分为反射光检测传感器、透射光检测传感器和散射光检测传感器阵列三部分,由遮光材料构成遮光光路。将带有LED灯且发出入射光的传感器,称为反射光检测传感器;接收透射光的传感器称为透射光检测传感器;多个相同传感器组成阵列接收散射光,称为散射光检测传感器阵列。

图2 颜色检测硬件示意图
颜色检测硬件整体可以通过调节形状的方式以适应不同大小的物体监测,遮光光路由内部全反射的白色平滑、外部黑色磨砂的绝缘耐热硬纸板制成。内部全反射的白色平滑面用于折射入射光或反射光,尽量不引起光能量损失。外部黑色磨砂面用于隔绝外部杂光的影响。通过设置遮光光路,提高光学检测的准确性。放置待测物体的平台由导热耐腐蚀金属制成,遮光光路和放置待测物体的平台可以更换,以适应不同物体的监测。内部监控摄像头为全彩广角摄像头,带有红外夜视功能,与远程控制设备、本地客户端、服务器通讯连接,可以实现实时通信,通过直播或者录像方式可以在远程控制设备或触摸显示屏上实时观察待测物体的状态。
为适应不同的监测需求,系统设定了多种监测模式。
①待测物体若为不透明高反射系数物体,例如石膏、金属、大理石、木材等,透射光检测传感器获得的测量数据将远小于反射光检测传感器获得测量数据,则只读取反射光检测传感器获得的数据计算RGB值。在输出光强已知的情况下,可以通过两检测传感器的光强数据计算反射系数和折射率。
②待测物体若为透明且低反射系数物体,例如有色玻璃、结晶体、透明液体等,透射光检测传感器获得的测量数据将远大于反射光检测传感器获得测量数据,则可只读取透射光检测传感器获得的测量数据计算RGB值。在输出光强已知的情况下,吸收特定波长的光服从朗伯-比尔(Lambert-Beer)吸收定律来确定吸光物质的浓度及其厚度间的关系,即可通过两检测传感器的光强数据计算透射系数和折射率。
③待测物体反射系数与透射系数接近时,透射光检测传感器获得的测量数据和反射光检测传感器获得的测量数据将同时输入光学检测下位机进行计算,获得两侧RGB值并获得两侧光强值。
该颜色检测硬件与颜色检测下位机相连,通过UART转换为USB接口将所获得的数据上传至上位机处理器及服务器,配合散射光检测传感器阵列的数据,进一步在上位机处理器可推出色坐标、颜色饱和度、色温,物体透光性、折射率、反射率等,可以进行比对粗略预测物质种类。
为满足实际实验室和工厂的需要,本文设计的监测系统,其整体结构可参考监测控制系统整体结构(图3),整个系统由上位机处理器、光学检测下位机、环境监控下位机、控制专用下位机、远程控制设备、服务器、备用电源、本地控制系统及相关软件组成。

图3 基于光反射与透射及物联网技术的动态颜色监测控制系统整体结构
总体设计采用“服务器+单上位机+多下位机+双控制系统”模式,职责不同的下位机分别采集实时数据并进行放大、解调、滤波等简单处理分析计算,并同时发送给上位机处理器,上位机处理器采用多通道数据采集方式进行连接,使得系统可对多路信号进行高速采集,采集率可由远程控制设备或本地控制系统手动进行控制,支持高速SPI通信,可以加入更多的下位机以拓展系统功能。
为保证系统数据监测的实时性,上位机使用Linux操作系统,接收到的数据先通过TCP/IP协议将数据发送到服务器进行备份,然后进行条件判断和基本检测并转化为图表的操作,将变化点和疑似错误结果在该数据点进行标注,完成后再通过网络接口发送给服务器和控制系统。系统实际运行界面触摸屏如图4所示。

图4 系统实际运行界面触摸屏展示
另外,实时控制的本地控制系统通过UART转换为USB数据将提前设计好的阈值参数信息发送给上位机处理器,用户端可以依据监测结果灵活调整搭配生产线上的具体设备,同时可以进行远程控制,完成操作过程中的标注和筛选。触摸显示屏用于对整个系统的各项参数进行实时显示,还可以通过与扬声器的配合提醒疑似错误的结果或警告监测数据超出阈值。监测到的数据可以实时显示在触摸显示屏上,为方便用户使用,上位机还对范式的显示进行支持,可同步记录数据标签,方便数据的离线分析。
2 RGB值和光强识别流程
根据德国物理学家赫姆霍兹(Helinholtz)的三原色理论,各种颜色是由不同比例的三原色(红、绿、蓝)混合而成的。本文采用Arduino作为光学检测下位机,Arduino内部频率为16 MHz,选取8分频后的2 MHz作为时钟,对应周期为0.5μs。
RGB值及光强的识别流程如图5所示,在进行白平衡调整后,对TCS230传感器的输出脉冲依次进行计数,定时到时间基准结束,分别计算每个通道所用的时间。这些时间对应于实际测试时每种滤波器所采用的时间基准,在这段时间内所测得的脉冲数就是所对应的R、G和B的值。

图5 颜色检测与光强程序流程图
透射光检测传感器、反射光检测传感器、散射光检测传感器阵列同时运行该程序,经过时间校对和计算后,可得到RGB值、两侧光强、散射光情况,并可进一步计算常见光学参数指标,如色坐标、颜色饱和度、色温,物体透光性、折射率、反射率等,从而适应不同的监测需求。
在RGB模式下,某一色彩是由红、绿、蓝三原色组成,三原色会在0到255之间变化,各有256个值,可以组成16 777 216种颜色。我们没有必要这么精准地定义颜色,本文中以测得的R、G、B值为中心,设置一个距离中心值10的范围值,判断RGB值是否落在范围内,如果落在范围内,则说明颜色并没有发生变化。将获得的RGB值在以R、G、B为坐标轴的三维直角坐标系中取点,绘制的(R,G,B)空间即为RGB颜色空间图,如图6所示。

图6 RGB颜色空间图
假定测得的(R,G,B)为(110,110,110),若(R,G,B)在图7红色正方体内变化时,实际颜色基本没有变化,则判定其颜色没有变化。用这种方法来判断颜色变化,虽然准确度没有(R,G,B)一点对应一个颜色精准,但是考虑存在的脉冲计数误差,传感器引脚产生的方波可能不是非常准确的方波,在计数上会有1-3数值的偏差,给定一个范围可以降低颜色变化识别的错误率。否则,系统将频繁给出颜色变化的提示,而实际上颜色可能并没有发生变化。在具体的应用环境中,使用者也可以适当调整算法以适应具体精度要求。
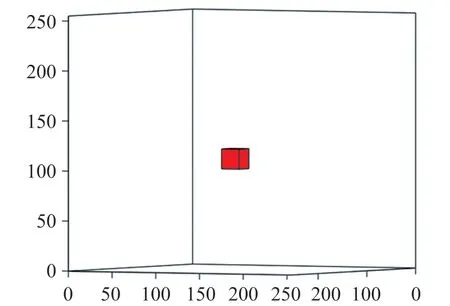
图7 阈值范围RGB颜色空间判别图
3 检测实验
系统的准确性测试通过一个专门的实验检测来说明,图8为颜色监测系统现场测试图。选择国际颜色标准比色卡,在其中任意选取部分样本,从中间沿着纸张缝隙任意分离,同时逆向在部分样本反面均匀随机粘贴多层白纸使其厚度不一。以上操作主要是用来模仿不同物体透光情况。使用适量酒精清洗表面杂质后,依次做好标记。
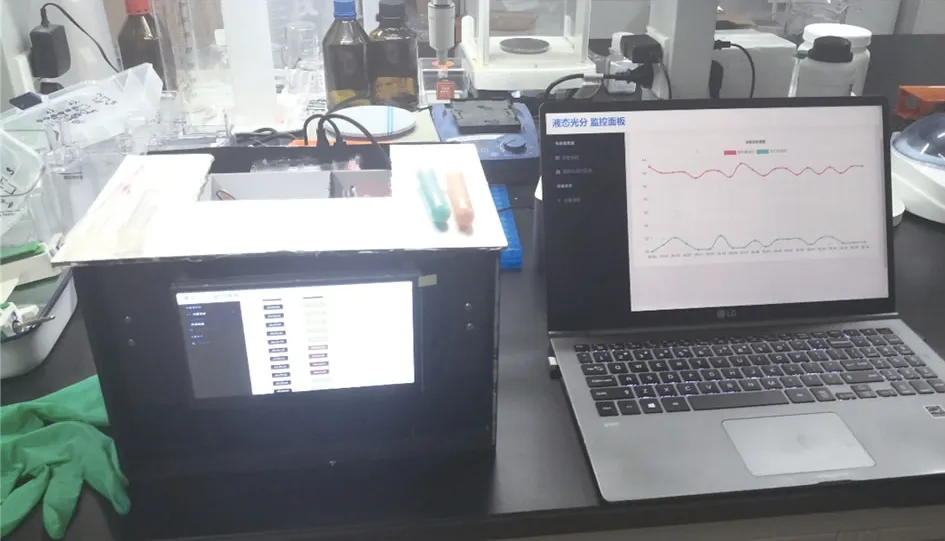
图8 颜色监测系统现场测试图
将处理过的标准比色卡放置在待测物体区,对颜色检测硬件部分进行密封遮光处理。每个样本重复“取出-放置-采样”的操作三次,取三次重复实验的数据均值。获得具体RGB数值如表1所示,其中R1、G1、B1为颜色标准比色卡上的数值,即待测样本的理论颜色的RGB数值。R2、G2、B2为本系统通过重复实验获得的样本实际检测值。

表1 系统测试实验RGB数据表
将数据绘制在以2为阈值半径的RGB颜色空间判别图内,如图9所示。在随机选取的12个样例中,只有1例在该阈值设定的情况下未能检测成功。

图9 RGB颜色空间判别图
为了能更好的反映系统性能,对RGB三个通道分别进行数据分析。因为颜色数值是定义量而不是真实的物理反馈,不能像测试物质含量等使用类似

这样的相对误差计算方法来确定。
例如理论颜色(2,0,0)与实际测得(1,0,0),理论颜色(255,255,255)与实际测得(254,255,255),这两组比对都是在R通道上的1数值变化。在单通道情况下使用该公式可得:误差=|((2-1))/2|为50%,误差=|((255-254))/255|,约为0.39%。
在定量变化下,计算得到的结果差距极大。而在三通道同时使用类似公式计算,所获得的数据远小于1%,不能将其作为系统的性能判断标准。因此,本文通过单通道检测再多通道计算的方式计算系统的误差情况。
因为RGB系统是对通道内的刺激值进行标点,标点范围为0~255,则在单一通道内,其误差计算可设定为:

从RGB颜色空间判别图以及表2可以看出,系统可以准确地对颜色RGB进行识别,尤其对R通道、B通道效果较好,系统平均误差在4%以下,该误差在实际使用过程中完全可以接受。标准色的实测值与标准值尤为接近,从而能够准确判断颜色变化。针对具体的应用场合要求,也可以编写简单的代码实现所需求的个性化功能,以检测实验和生产,测试系统完善且具有的实用效果。
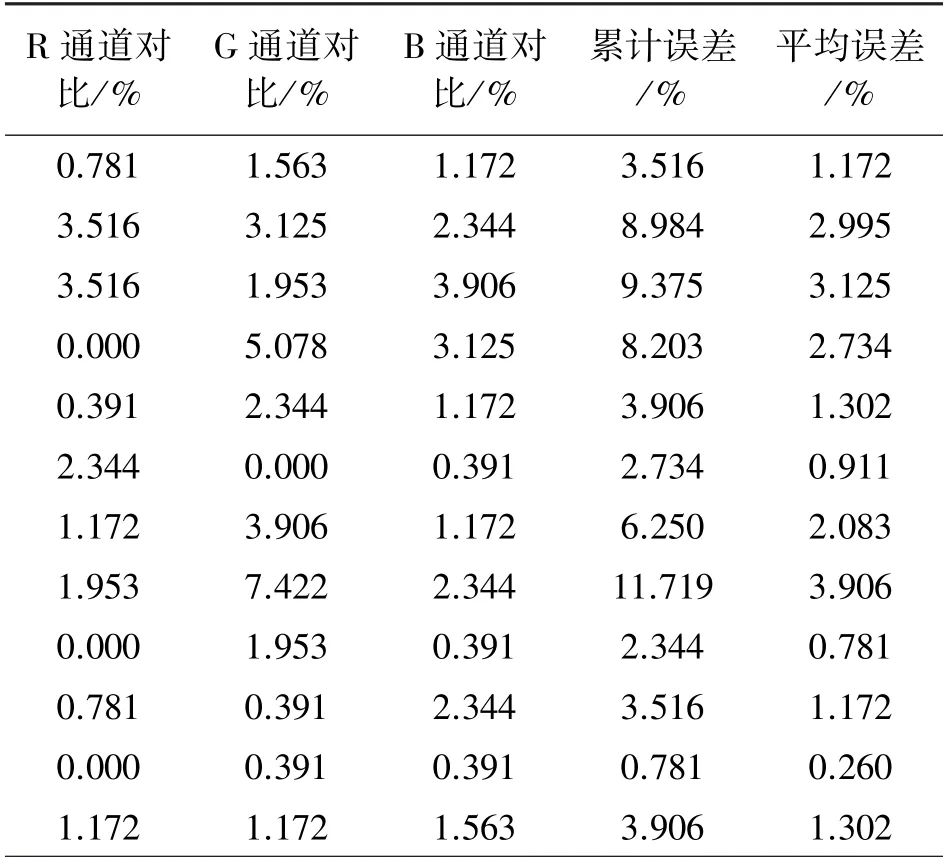
表2 系统误差对照表
4 结论
针对当前工业生产线及实验室在化学反应过程中对时间、过程、精度的控制需求,尤其是在化学反应变化中出现的颜色变化的监测与控制,设计了一种基于光反射与透射及物联网技术的动态颜色监测控制系统,由上位机处理器、光学检测下位机、环境监控下位机、控制专用下位机、远程控制设备、服务器、备用电源、本地控制系统及相关软件组成。以无线通信技术、传感器技术为基础,涉及物联网智能设备、光谱分析、颜色识别、化学反应监测领域,讨论了监测系统的总体设计方案、具体硬件及软件设计。系统中各辅助器件可用于智能化应用操作及延伸拓展开发,基本解决了操作员在检测过程,尤其是化学反应过程中因个人造成的误差问题。论文提供了一种在实验室和工厂中智能化操作的新思路,有望实现工作效率与操作精度的提高,给国内相关设备的研发提供思路。
