生物实验饲养箱监控系统设计
2022-01-17刘绍鑫肖茁张可靖张振彪钟茉
刘绍鑫,肖茁,张可靖,张振彪,钟茉
(湖南工业大学 电气与信息工程学院,湖南 株洲 412000)
0 引言
实验生物是研究生命科学不可或缺的材料,但饲养过程中存在一些潜在风险。其一,许多实验动物饲养在未达良好标准的场地,甚至在实验室中散养,伴随动物撕咬、抓伤等事故的发生;其二,许多师生不按照实验安全注意事项进行操作,没有防护措施,个人未灭菌直接进出实验室,极易导致人畜共患病和动物气溶胶的危害。
国内外研发饲养箱研究现状,国外的研究在智能化和自动化方面已经取得了很大的进展[1],而我国的生物实验饲养箱在技术上不够成熟,在一定程度上依赖于外国进口。目前我国尚无统一的实验动物笼器具标准,现有的实验动物饲养器材在实际应用中存在许多不足之处,能够帮助研究、检测实验动物的设备大多功能单一,且只能针对单一的动物。
由此设计一款集自动控制技术、智能检测技术、现代通讯技术、云平台技术于一体的生物实验饲养箱系统,本系统具有以下特点:
1、扩充产品的适用对象,能根据生物的不同生产环境进行调节从而能够饲养多种动物;
2、可通过云平台、手机等实施近远程相结合的实时监控、多种数据记录与操作;
3、在喂养、卫生环境、报警等方面拥有自动和手动模式;
4、降低了病菌传播感染风险。
1 系统总体设计
监控系统结构如图1所示,以一台工控机监控多台宠物饲养箱,工控机与下位机采用485总线通讯模式,通讯距离大于1000m。饲养箱包含温湿度控制模块、自动换气与空气消毒模块、自动投食模块、动物行为监控模块等部分,其中温湿度控制模块主要实现饲养箱恒温、恒湿控制;自动投食模块除具有投食、投水功能外,还包含实物与水定量控制;自动换气与空气消毒模块。
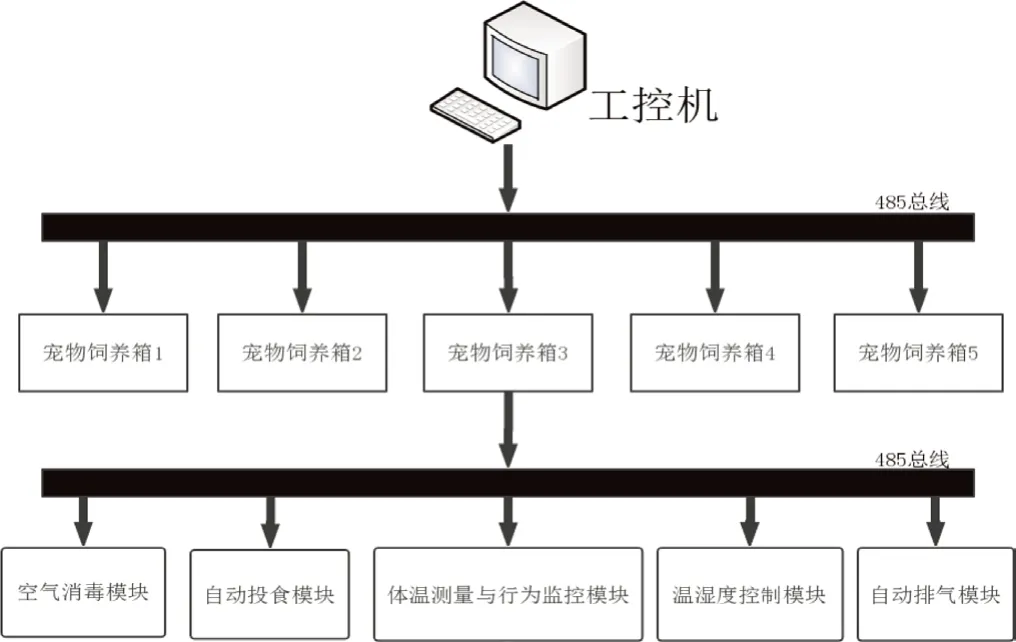
图1 监控系统结构图
主要实现饲养箱与实验室空气对流与杀毒;动物行为监控主要实现动物在实验条件下动物行为,包含饮食情况、运动情况等实验要求。
如图2所示是监控系统网络拓扑结构,工控机产生的数据通过以太网传输到云平台,再由云平台传输给手机客户端,同时,手机客户端也能利用云平台来控制工控机,从而控制宠物饲养箱的各个模块。
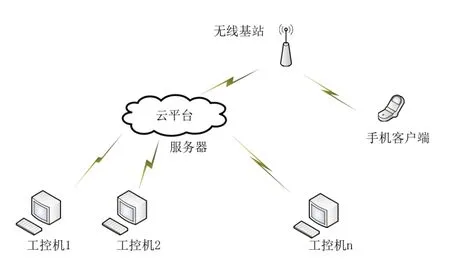
图2 监控系统网络拓扑结构图
2 系统功能模块设计
2.1 温湿度控制模块
采用DHT11传感器作为温湿度传感器,它能对数字进行精确采集以及对温湿度具有较好的传感技术,确保产品具有极高的可靠性与卓越的长期稳定性[2]。此传感器包括NTC温度传感和湿敏电阻元件,并且连接于单个的STM32单片机,它不仅响应较快,而且具有很强的抗干扰能力,性价比也极高。其精度湿度为±单片机相,温度±温度,量程湿度 20%~90%RH,温度 0~50度[3]。传感器内部在检测信号的处理过程中要调用在OTP内存中以程序的形式储存的校准系数。为了使系统的集成变得简捷,采用单线制串口。超小的体积、极低的功耗,信号传输距离可达20米以上,使其成为各类应用甚至最为苛刻的应用场合的最佳选则[4],电路如图3所示。
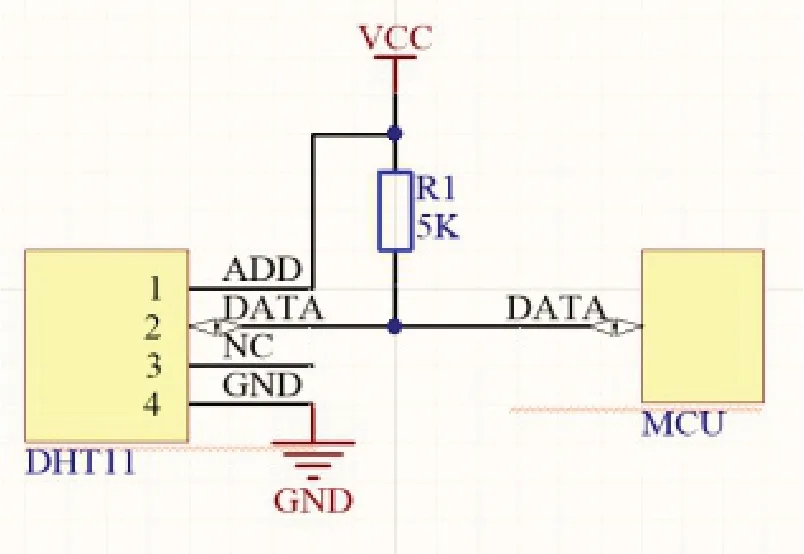
图3 DHT11数字温湿度传感器与单片机的连接电路
在高温条件下,将PTC陶瓷发s热组件与波纹铝条胶粘组成温度加热装置。该类型PTC加热器有热阻小、换热效率高的优点,是一种自动恒温、省电的电加热器[5]。具有升温迅速、使用寿命长、工作电压范围广(12V~380V),设计方便等特点,最主要是PTC安全性能好,发热时不发红、无明火,可以避免起火。
加湿装置采用继电器来控制加加湿器的运行,选用的是JQC-3FF-S-Z电磁继电器,该继电器工作电流65mA,吸合电压为5伏,触发电压0-3.5V,触发电流2mA。由铁芯、簧片、线圈和衔铁组成如图4所示。
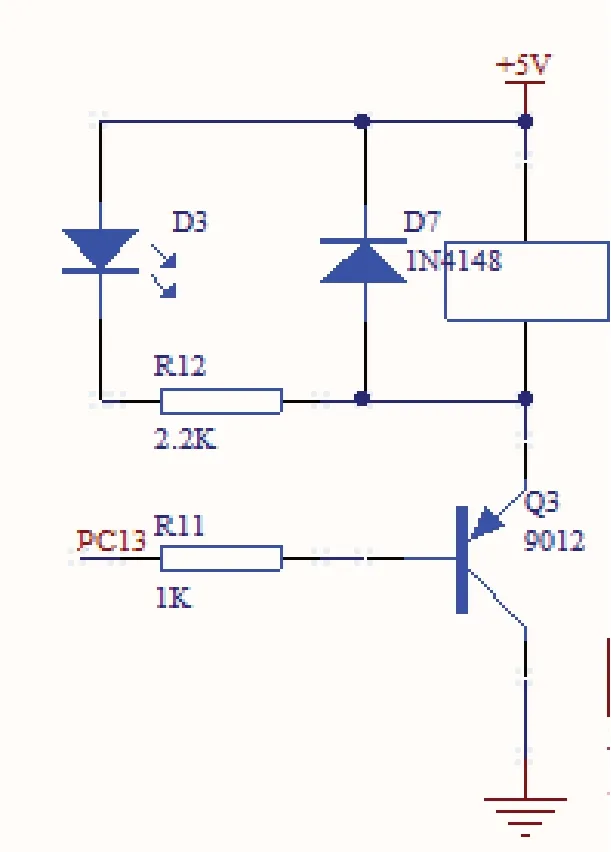
图4 继电器控制电路
首先,由用户通过触摸屏设置相应饲养箱内部的温度及湿度,再由温湿度传感器采集数据传递到STM32单片机进行处理,对不在设定的范围之内的饲养箱的温湿度进行调节,如当温度过低时,通过单片机控制接通温度加热装置的电源,从而使温度达到要求;当湿度未在要求范围内时,由单片机控制加湿器使湿度达到要求。
2.2 自动排换气模块
MG811二氧化碳传感器对CO2具有良好的灵敏度和选择性[6-7],二氧化碳低湿度和温度依赖长期稳定性和再现性的特点。
为了方便使用,换气扇设置了两种工作状态:手动和自动。通过STM32生成双路PWM波经过电机驱动电路来分别控制排气通道的换气扇和进气通道的换气扇;为了避免误操作导致换气扇在高速运行时突然停止,产生大电流将电路烧坏,通过改变STM32生成的脉冲宽度调制的波形的占空比来使排气扇的转速达到理想转速。
由于L298N电机驱动电路有:可实现电机正反转及调速。启动性能好,启动转矩大。工作电压可达到36V,工作电流最大值为4A,可同时驱动两台直流电机,采用L298N驱动电路作为换气扇电机的驱动电路,电路如图5所示。
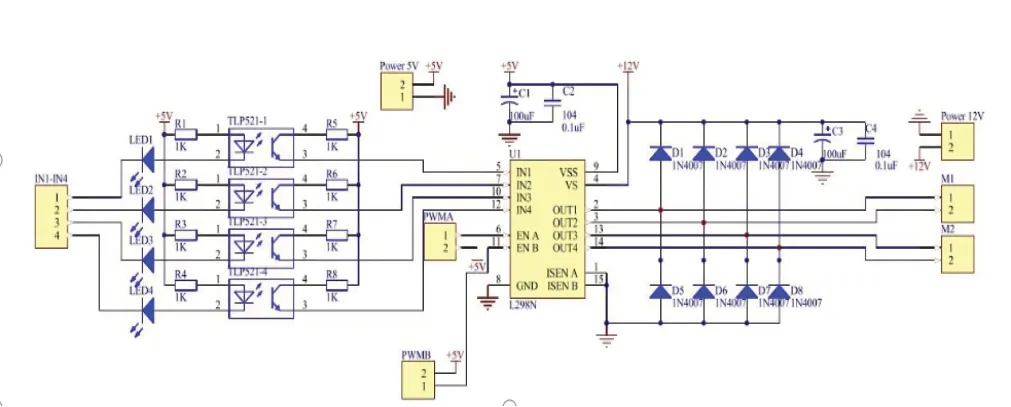
图5 L298N电机驱动电路
由于手动和自动两种工作模式方式都是控制相同的对象,为减少电路不必要的回路,将手动模式以及自动模式采用同一个控制信号,通过按键SW1来将二氧化碳传感器所产生的信号断开或连接来控制手动与自动模式的切换,按键SW1按一下就切换一次操作模式。当模块工作在手动操作模式时,通过按下按键SW2使换气扇工作在排气状态、通过按下按键SW3使换气扇工作在进气状态、通过按下按键SW4使换气扇停止工作。当模块工作在自动操作模式时,利用二氧化碳传感器检测生物实验宠物箱内部的二氧化碳浓度,二氧化碳传感器将采集的信息经过A/D转换传递给STM32单片机,单片机通过对比用户设置的二氧化碳浓度的范围,进行判断换气扇是否工作并产生对应的信号,从而,实现换气扇的运行。同时在排放气的通道各加一个空气过滤器,用来防止实验宠物箱里面的有毒的细菌通过换气这个过程,进入到箱外,从而,避免实验室研究人员感染细菌,也避免了实验人员进实验室时意外携带的细菌、病毒等通过换气通道进入试验箱内,干扰实验的结果。如图6所示是自动换气扇模块工作流程图。
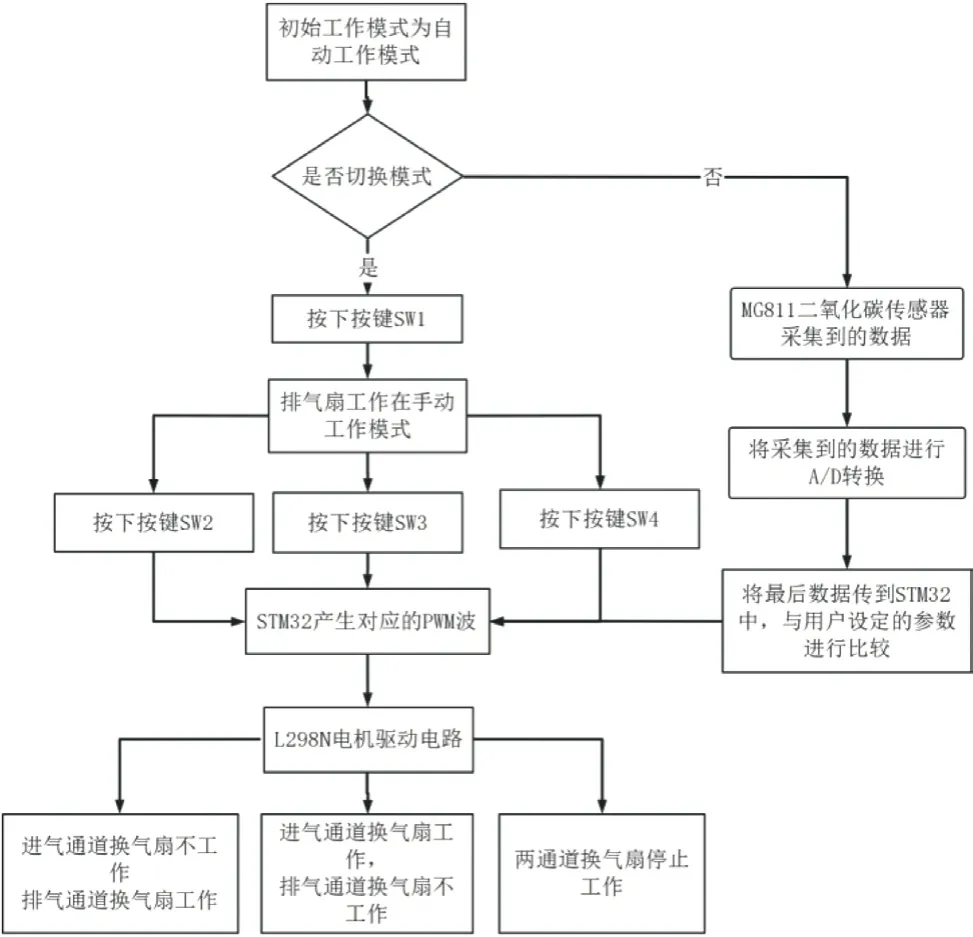
图6 自动换气扇模块工作流程图
2.3 空气消毒模块
该模块采用K24次氯酸消毒液进行空气消毒,K24次氯酸消毒液有效除菌原理与人体白血球的抗抑菌原理相同,仅对细菌和病毒等产生强氧化作用,对人和动物无伤害,相比酒精类消毒产品的挥发性和易燃易爆性,次氯酸消毒液在较大范围内使用时更加安全,也可以防止宠物呼吸时吸入挥发至空气中的酒精而导致身体受损。
其次,空气消毒模块也采用STM32产生PWM经过L298N电机驱动电路,控制舵机的动作来使喷雾器工作,利用STM32来进行定时设定用户设置的消毒周期,每当达到一个消毒周期,STM32就控制装有K24次氯酸消毒液的喷雾器运行10ms来进行消毒,喷雾器运行的时间可根据测试时的实际的使用情况进行修改,以达到对整个饲养箱消毒的目的。
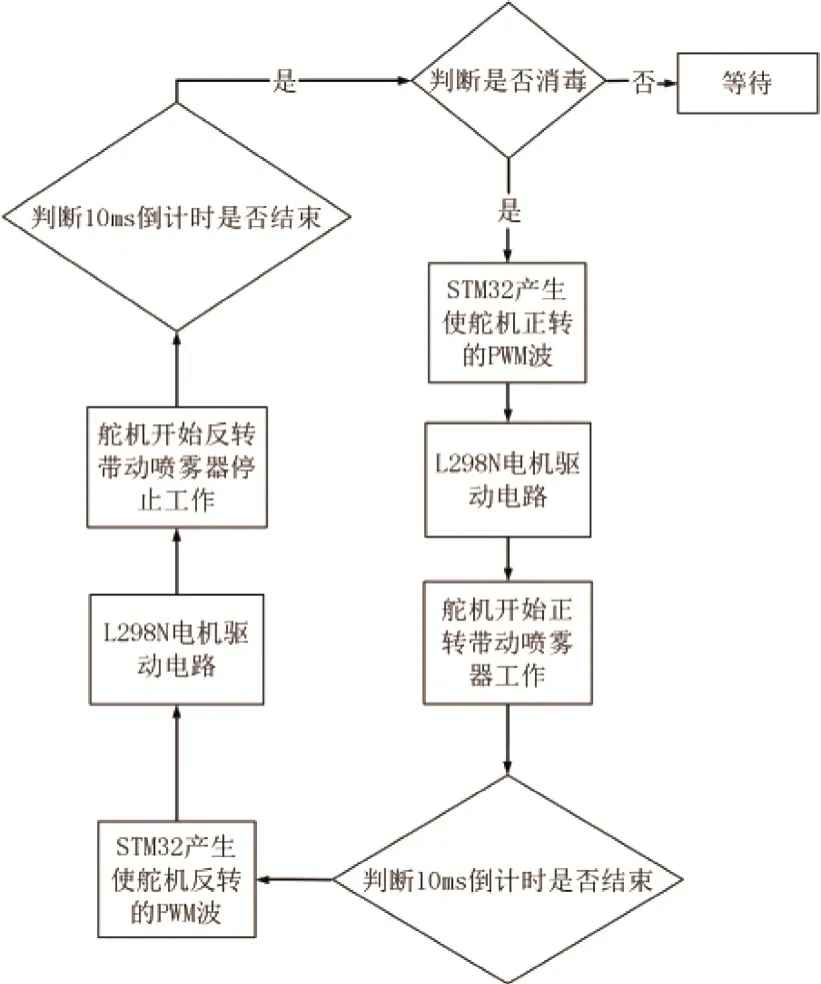
图7 空气消毒模块工作流程图
为了避免消毒液用完而没有及时补充事情的发生,在喷雾器下方加一个压力传感器,当喷雾器给压力传感器低于一定值时,将由STM32通过WIFI传到云平台上,最后通过云平台向工作人员的手机发出及时补充消毒液的信息。
WIFI模块采用ESP8266模块, 其具有一个完整的内含TCP/IP 协议栈的WIFI网络解决方案,它能够独立运行,也可以作为从机搭载于其他主机MCU运行。ESP8266模块使用AT 指令对设备进行快速配置,根据实际使用需要可以将模块配置成ST模式[7]。
2.4 自动投食模块
主要有3种喂水喂食方式:第一种是Rtc时钟定时,当到达显示屏设定的时间时,饲养箱自动开启水泵或喂食舵机;第二种是LCD手动控制,通过LCD显示屏的控制界面来手动开启水泵或喂食舵机;第三种是手机终端控制,手机登录App远程开启水泵或喂食舵机[8]。
称重装置采用HX711压力传感器,它集成了包括稳压电源、片内时钟振荡器等其它同类型芯片所需要的外围电路[9],如图8所示,不仅集成度高,而且响应速度快,还不易受干扰。使得电子秤的成本有所下降,还提升了整机的各项性能和稳定性。当食物重量发生变化时,梁因受到垂直压力P而发生形变,电阻应变片R1、R3的阻值因此弯拉伸而变大。R2、R4受压缩,阻值减小。电桥失去平衡,产生不平衡电压U,电压U与作用在传感器上的正压力P成正比,从而将非电量转化为电量输出[10]。电桥示意图如图9所示。
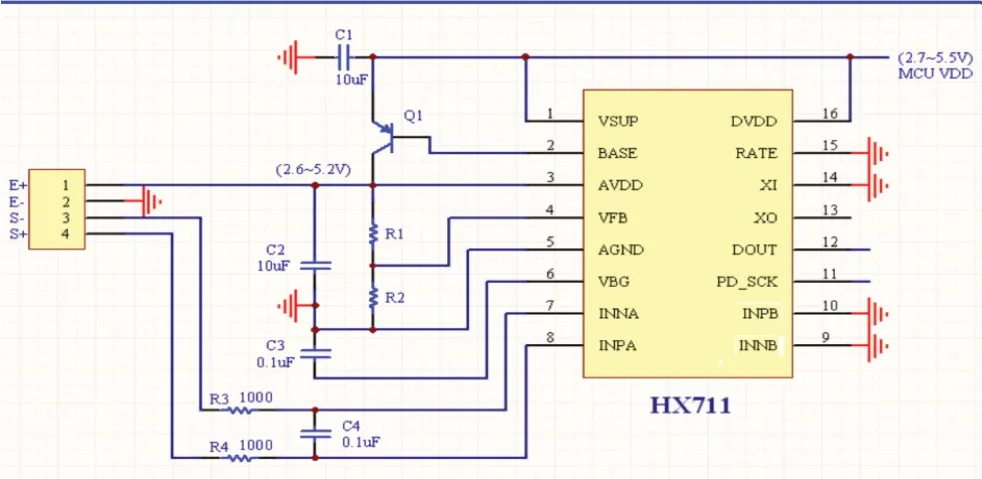
图8 HX711外部电路
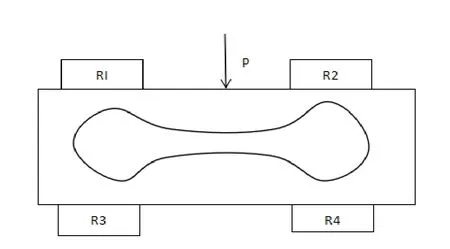
图9 电桥示意图
自动投食模块设置了一个定量开关来控制电磁铁的开关,在实物量少于100 g时打开出料口,在达到阈值后关闭出料口。为了保证食物的新鲜,每隔两天通过云平台向工作人员的手机发出换食物的信息。
2.5 体温测量与行为监控部分
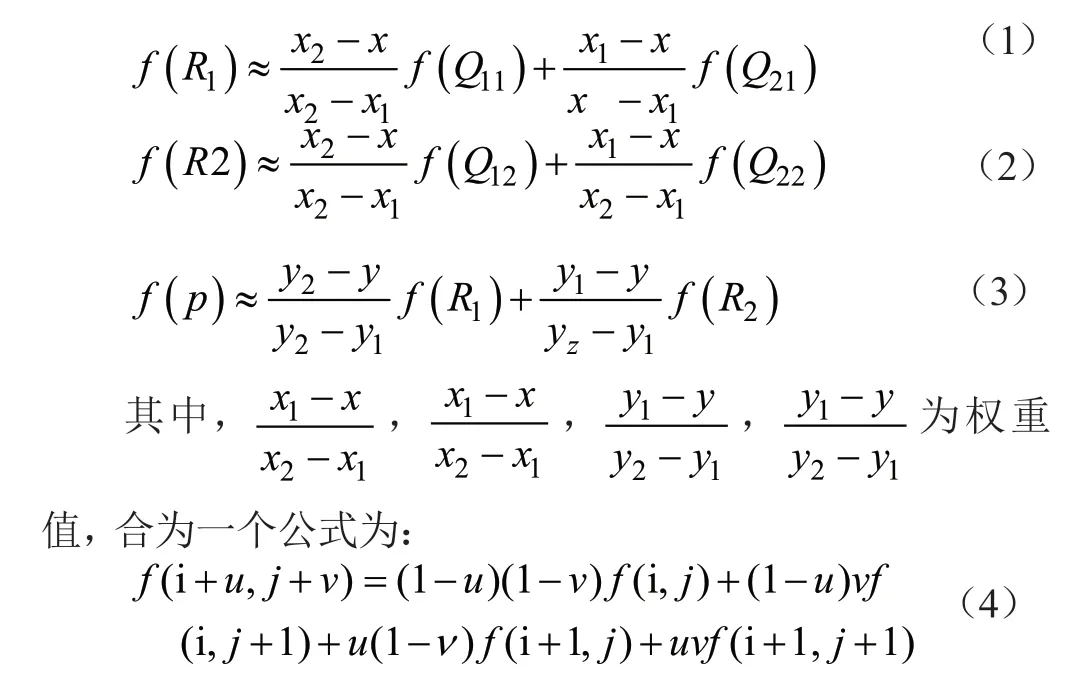
利用MLX90614红外热成像传感器得到宠物饲养箱内热源图。采用双线性内插值算法将原始的32*24分辨率热源图放大10倍。其原理较为简单,如图10所示,p点像素值决定于Q12、Q22、Q11、Q21这4个点的像素值:
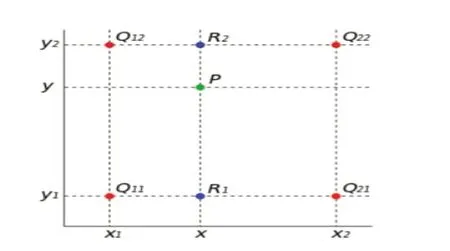
图10 红外热成像传感器获取的热源图
先在X轴方向做2次插值操作(分别为R1和R2),之后在Y轴方向做一次插值操作§,相反的,也可以先在Y轴做2次插值操作,然后在X轴做一次插值操作:
再将图像阈值二值化后进行边缘检测,使用改进的迭代法求二值化的阈值:该算法每次取m1与m1之和的一半来更新阈值,该算法每次取m0与m1之和的一半来更新阈值

为了使阈值更接近m1,对以上公式进行修改,增大m1的比重,同时减小m1的比重,比重可随实际情况修改:

在最大的区域的像素点中选择温度最高的15个像素点的温度,取平均值作为宠物的体温数据并记录。
由于生物的体温明显比环境温度高,因此可直接使用灰度重心法求取重心。灰度图像由每个像素点的温度值直接转换为灰度值获得。对于M * N大小的图像f,像素的灰度值凡是超过阈值T(可用二值化阈值代替)的均参与重心处理,于是重心坐标为:
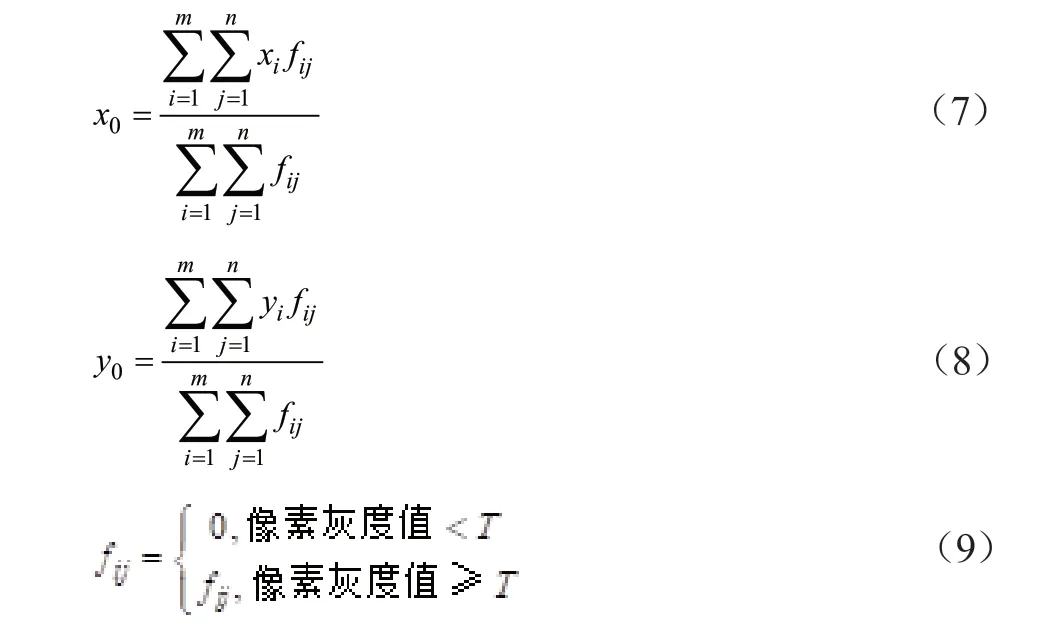
记录每次刷新后的重心坐标值,绘制成行动轨迹对其监控并将监控信息通过WIFI保存并发往云平台。
3 系统人机交互模块设计
3.1 工控PC机、云平台、手机APP小程序
工控PC机采用485总线结构监控多台宠物饲养箱,实现对空气消毒装置、饲养箱自动排气换气模块、温湿度控制模块、宠物行为监控与体温测量的远程参数监测、控制参数修改、开关远程控制、特殊情况报警、报警记录保存与查看功能、数据打印等功能,这种结构不仅节省布线成本,便于宠物饲养箱增加新的功能模块,也有利于宠物饲养箱的更新升级。
有人透传云提供了一套二次开发demo,采用 JAVA语言进行云平台二次开发,通过MyEclipse软件编写云平台程序并在Tomcat上面部署项目,Tomcat运行在云服务器上,云服务器一边连接有人透传云的CoAP服务器,一边为手机APP端提供TCP连接,这样只要授权用户访问云服务器就可以获取实验宠物箱的各项监测数据。
手机APP的开发主要采用mui框架,mui框架具有开发简单、快捷的特点,开发出来的界面美观简洁,APP可以兼容Android、iOS、平板等不同平台。APP界面中对各个模块进行分块处理,每一块对应一个模块的所有信息的处理,包括基本数据显示,信息记录,以及相应控制参数的修改,以及对模块异常的报警。
3.2 触摸屏显示控制模块
触摸屏选用四线电阻式。将具有12位转换精度并且支持SPI通讯协议的ADS7846控制芯片作为触摸屏控制器的选择;液晶屏控制器选用的EPSON公司的SED1335,带有32K字节的SRAM,适用于文本显示和图形显示(320*240点)两种形式,最多3层图形显示合成[11]。
通讯以STM32单片机作为主机,而SPI从机的半双工方式通讯以ADS7846作为程序流程图。当使用者点击触摸屏,触摸屏一旦接收到,中断请求就由ADS7846向主机发出,该请求由C8051F350进行响应,第一次SPI传送是STM32单片机发送控制字符给ADS7846控制器,包含起始位、通道选取、8/12位模式、差分/单端选取和掉电模式选取等信息[11],接下来的两次SPI传送则是A/D转换结果的数据由STM32从ADS7846中读取,触摸屏和单片机之间就完成了一次通讯。通讯有初始化系统,传输SPI数据、中断服务等过程。调用两次SPI通讯程序来完成一次坐标的转换,以分别读取X、Y坐标的值。由于转换的有效值结果最后两位有较大的变化,故可将其高十位作为最后的计算结果。
触摸屏界面共有8幅画面,主画面、自动排换气模块画面、温度湿度控制模块画面、空气消毒模块画面、自动投水投食模块画面、体温测量与行为监控模块画面,参数设定与说明画面,故障报警画面。主画面主要是对系统的各部分的介绍,方便用户使用;自动排换气模块画面主要显示当前饲养箱内部的CO2浓度;温度湿度控制模块画面显示当前饲养箱内部的温湿度;空气消毒模块画面显示消毒液的剩余量以及上次消毒的时间;自动投水投食模块画面显示水的剩余量以及饲料的剩余量;体温测量与行为监控模块画面显示当前生物的体温以及异常行为的记录;在参数设定与说明画面可以设置温湿度控制范围、空气消毒的间隔时间、喂食量等以及对各模块的参数值进行了详细的阐述,有利于实验人员更快了解实验生物的状况,故障报警画面对各异常状态进行报警以及对异常状况进行记录,可以随时查询报警的原因及时间,并提醒实验人员及时解决问题。
4 结语
本文设计了一款集恒温、恒湿、消毒、录像、自动投食、红外测温、远程监控、异常情况报警等功能于一体的生物实验饲养箱监控系统,该系统以工控PC机为枢纽,通过485总线连接各模块,同时控制多个饲养箱。系统数据通过以太网传输到云平台,云平台和手机客户端进行互相信息传递,从而控制宠物饲养箱的各个模块,通过远程监控,可极大的减少实验人员管理实验生物的时间和实验人员接触实验对象的次数,既降低了实验人员感染病毒的风险,又提高了实验效率,还降低了人力物力成本。本系统还有几个有待优化和提高的地方,比如可以增加一个摄像头,实时地监测宠物当前状态,优化图像处理算法,给投食投水模块增加箱内清洁、粪便分解功能等。
