多指软体机械手设计、仿真和试验研究
2022-01-16褚凯梅
褚凯梅, 杨 洁, 冯 凯, 赵 虎, 吴 杰
(南京林业大学机械电子工程学院,江苏 南京 210037)
现有的机器人大多是用刚性材料制造而成,但刚性材料的特性导致其对环境的适应能力低,在非结构化环境中不能很好地适应环境的变化[1-2]。受到大自然中众多软体生物的启发,伴随着材料科学的快速发展,国内外学者们将目光投向了软体机器人领域[3]。软体机器人采用软体材料制成,在工作中对非结构化环境的适应能力更强,在和人类的交互中也更为安全[4-5]。软体机械手[6-10]作为软体机器人领域的一个重要分支,它在诸多领域都有着良好的应用前景。例如针对水果、鸡蛋等外形多变[11]、表面易碎物品抓持装置,在医疗领域所使用的辅助康复装置和针对瘫痪患者使用的助力机构等[12-16],这些场合都要求机械手具有绝对的安全性能和良好的适应能力[17]。近年来,国内外学者对软体机械手的研究已经不仅仅局限于材料、结构等基本的方向,在针对软体机器人的驱动、传感[18-20]、控制建模等方面也有了很大的进步,这些研究使得软体机械手在越来越多的领域崭露头角,应用前景一片光明。
1 软体手指弯曲原理及结构设计
软体手指采用气压驱动原理,单指驱动模块的弯曲原理如图1所示,当向空腔内充入气体时,因为弹性形变层的形变大于应变限制层,因此上下侧产生形变差,导致驱动模块产生弯曲[21]。
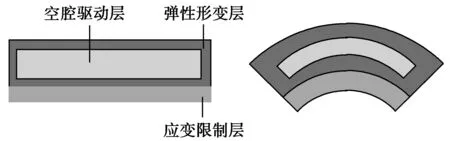
图1 单指驱动模块弯曲原理
基于上述气压驱动的原理,对软体手指结构进行初步设计。软体手指分为三个部分,弹性形变层,空腔驱动层和应变限制层,整体宽度为24 mm,共包含8个关节,各关节宽度均为20 mm,中间5个关节长度均为为7 mm,前侧关节长度为17 mm,末端关节长度为12 mm,关节间通过半径为3 mm的半圆柱进行连接,内部留有气腔,在软体手指末端留有半径为1.8 mm的半圆柱孔,用于通入气压以控制软体手指弯曲,软体机械手单指模型如图2所示。
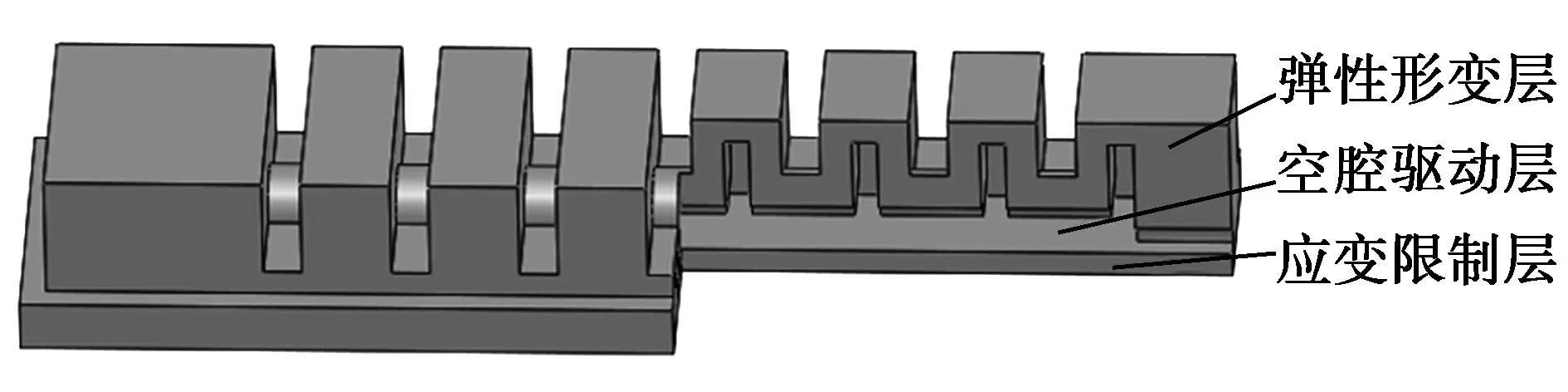
图2 软体机械手单指模型
对软体手指结构中的壁厚b、间隙d和限制层厚度h进行参数的优化,针对每个参数选择三个不同的数据并进行建模,导入到ABAQUS内进行仿真,比较在其他条件一致的情况下,该参数的改变对软体手指弯曲性能的影响。软体机械手单指模型剖面如图3所示。

图3 软体机械手单指模型剖面
2 软体手指的仿真分析
为了验证所设计的软体手指能够实现我们需要的弯曲性能,通过有限元软件能够对其进行模拟。
首先在SolidWorks软件内对软体手指单指模块进行建模,注意模型必须是封闭的,然后将其导入ABAQUS内,完成模型的创建。
创建和编辑材料。模型采用各向同性的非线性超弹性材料,应变势能采用2阶Yeoh模型,系数为C10=0.11,C20=0.02[22]。
创建分析步。创建分析步step-1,选择静力通用类型,打开几何非线性,增量步初始为0.01,最小为1E-059,最大为1,最大增量步数为1 000。
创建受力面和载荷。选择该软体手指气腔的内表面作为受力面,并在气腔内部选择一个点,创建流体气蚀区压力,分别对受力面施加10 kPa、20 kPa、30 kPa、40 kPa、50 kPa和60 kPa的压力。
设置边界条件。选择该软体手指的一个面为边界,完全固定,即完成边界条件的设置。
划分网格。首先对模型进行布种,然后对模型进行网格划分,网格类型为四面体。网格划分如图4所示。

图4 网格划分
创建作业。创建作业,提交检查并运行,并查看仿真结果。
所设计的软体手指单指模块壁厚为2.5 mm,限制层厚度为2 mm,关节间间隙为3 mm,仿真结果如图5所示。
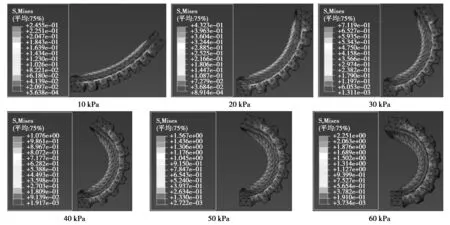
图5 软体手指单指模块有限元仿真结果
3 软体手指的制备工艺
所涉及的软体手指整体均由硅胶制作而成,利用模具进行浇注,其制作过程包括硅胶的配置,浇注,取模,修剪等多个环节。软体手指制作的工艺流程如图6所示。
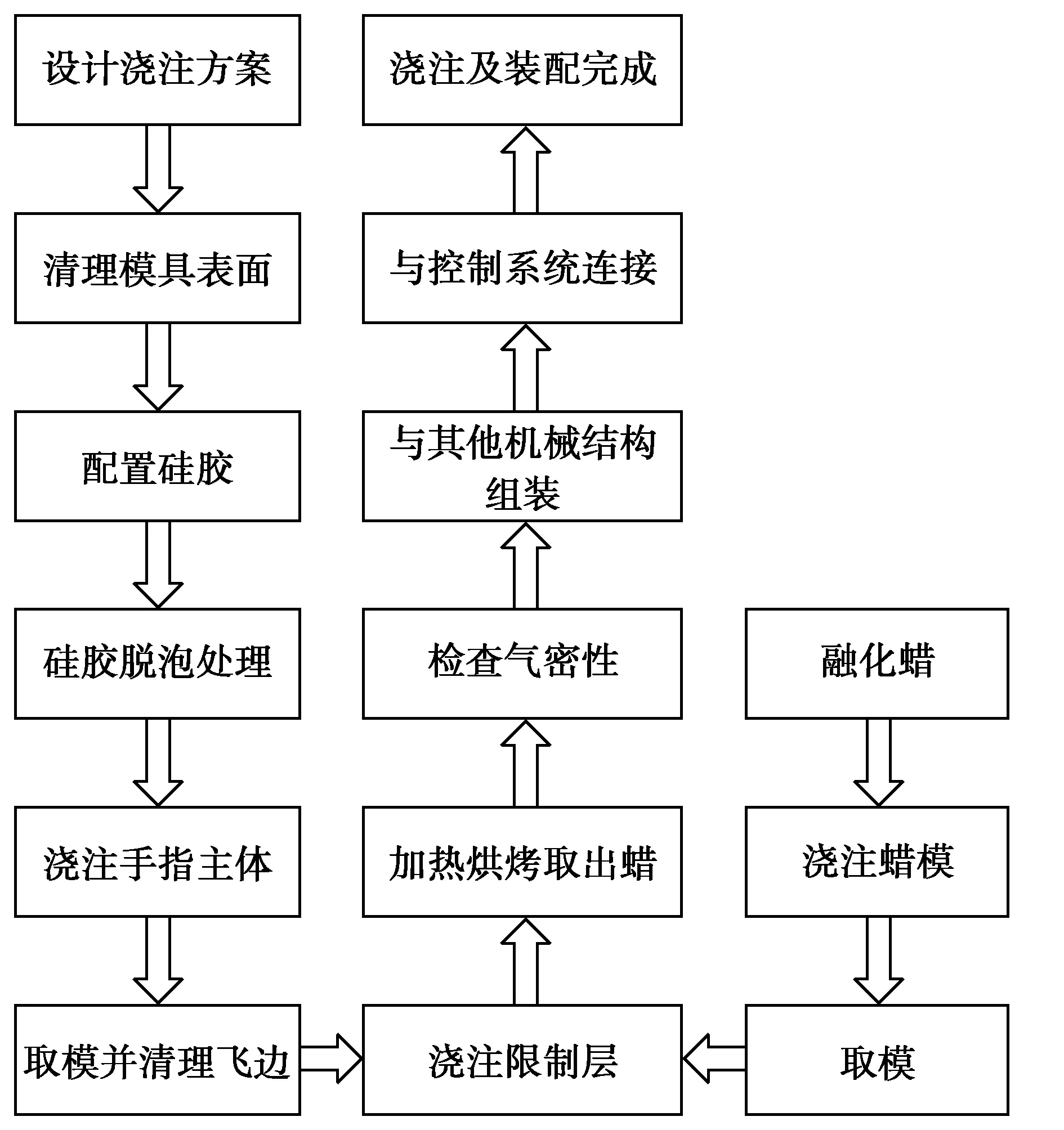
图6 软体手指制作工艺流程
软体手指制作的具体操作步骤如下:
(1)将各个模具内壁清理干净,确保其平整,避免影响手指成型;
(2)将Dragon Skin 20的两种组分按照1∶1的比例混合并搅拌均匀;
(3)将配置好的硅胶放入真空搅拌机内搅拌均匀,去除硅胶内的气泡;
(4)将脱泡处理后的硅胶缓慢且均匀地倒入软体手指的底座模具中,然后慢慢地将上端盖模具盖上,轻轻按压确保完全贴合,静置4 h左右;
(5)取模,对多余的硅胶进行修剪处理,检查手指整体是否无气泡;
(6)将蜡放入烘箱融化,并同时将蜡模模具的两个部分对齐并用封条固定;
(7)将熔化好的蜡取出,快速且均匀地倒入模具中,静置2小时左右;
(8)取模,将蜡模放入软体手指内,并将其整个放回底座模具内,将限制层模具盖上;
(9)同(2)(3)第二次配置硅胶;
(10)将脱泡处理后的硅胶缓慢而均匀地倒入限制层模具内,确保表面平整,静置4小时左右;
(11)取模,检查手指整体是否无气泡;
(12)将软体手指放入烘箱内加热,待蜡融化后将其完全挤出,取出软体手指清洗干净并晾干;
(13)将软体手指与气动接口连接,通入气压检查其气密性;
实际操作中的主要制作步骤如图7所示。

图7 主要制作步骤
4 控制系统设计
所设计的三指软体机械手采用气压驱动,气压的来源是气泵,控制系统采用STM32单片机,控制该三指软体机械手对待抓取物体进行抓取,总体方案框图如图8所示。
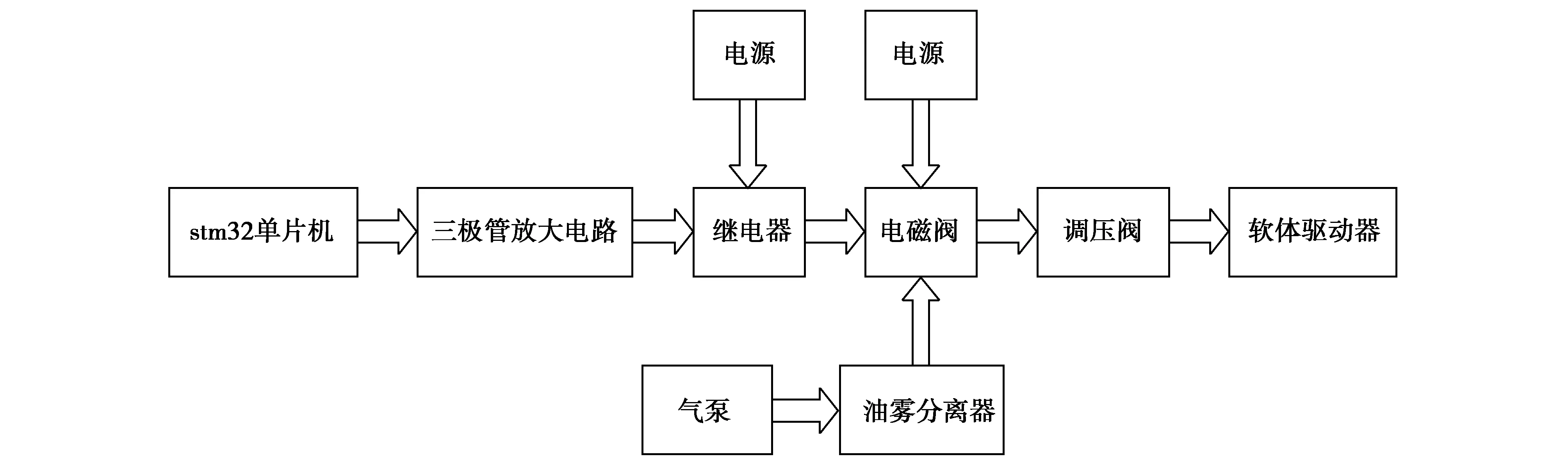
图8 总体方案框图
在针对该三指软体机械手所设计的控制总体方案中,气动回路包括了气泵、电磁阀和调压阀,最终将气源传递至软体驱动器,其气动回路流程图如图9所示。

图9 气动回路流程图
当需要使用所设计的多指软体机械手抓取物体时,STM32单片机发出高电平信号,通过三极管放大电流使继电器低压端闭合,继而吸合高压端接通电磁阀控制电路。继电器在该方案中起到隔离高低压的作用,对该电路有开关和保护作用,然后信号传递到电磁阀。电磁阀在该方案中起到控制线路通断的作用。打开气泵,气源通过电磁阀传递到调压阀,调到合适的气压后输出给软体驱动器,将待抓取物体抓起。所有部件选型完成后进行试验平台的搭建,试验平台如图10所示。

图10 试验平台
5 多指软体机械手试验研究分析
5.1 单指模块弯曲角度试验
为了测试在实际应用中驱动气压对软体手指单指驱动模块的影响,进行单指弯曲角度试验。搭建试验平台,检查气密性,通过固定支架将其固定到试验平台上;分别调节气压至10 kPa、20 kPa、30 kPa、40 kPa、50 kPa和60 kPa,每次调整气压都需等待气压值稳定5 s左右;待气压值稳定后,使用量角器对软体手指的弯曲角度进行测量,记录每个气压所对应的弯曲角度数据,并对所有数据进行整理,与仿真所得的数据进行对比。软体手指单指模块弯曲试验结果如下图11所示:

图11 软体手指单指模块弯曲角度试验
将试验所得的数据与仿真所得的数据进行比较,并绘制成折线图,其结果如图12所示。

图12 实测数据与仿真数据对比图
通过试验图可以看出,软体手指在气压逐渐增大时并没有出现严重的膨胀,但通过折线图可以看出实际测得的弯曲角度与仿真出的弯曲角度相差较大,其原因如下:
因试验需要,我们在进行该弯曲角度试验时对软体手指的末端关节进行了固定,对该软体手指的正常弯曲造成了一定的影响,为验证这一原因,在ABAQUS软件中同样对手指的最后一个关节进行固定,其他参数保持不变,将得到的结果与之前的仿真结果进行对比,其结果如图13所示。
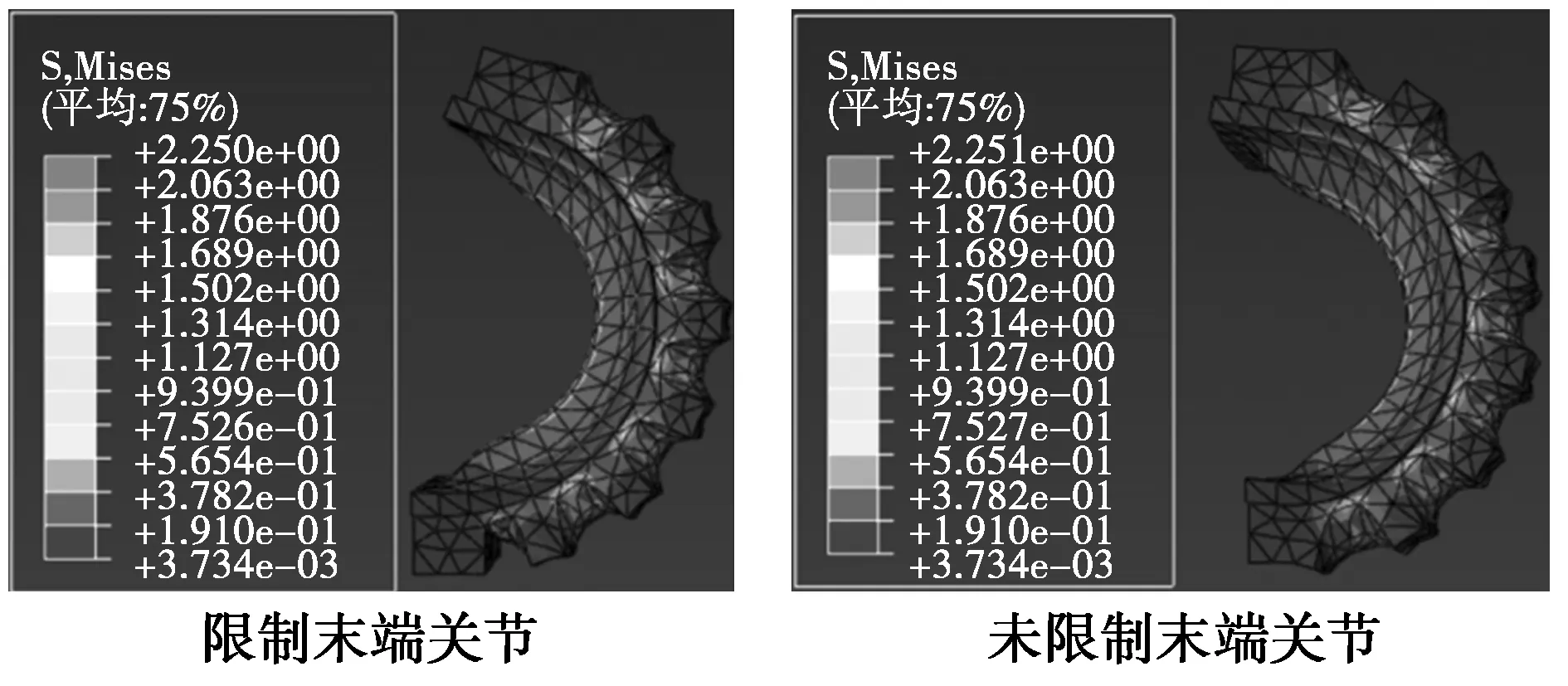
图13 仿真结果对比
从图中可以看出,限制末端关节后,弯曲角度明显减小,故而证明在实际的试验中,对末端关节的限制确实对软体手指弯曲角度有较大的影响;
在试验过程中使用橡胶软管对气泵与调压阀之间,调压阀与软体手指的气动接口之间进行连接,在传输途中,可能仍旧会存在漏气的情况,且气压会产生一定的损耗,导致软体手指的弯曲角度小于仿真结果;
仿真时对与软体手指的材料性能都设定为理想状态,但在实际的试验中,材料的弹性等性质与仿真所设定的理想状态可能有所出入,从而导致软体手指弯曲角度小于仿真结果。
5.2 单指模块末端力试验
为了能够测试所设计的三指软体机械手所能够夹持物体的重量范围,进行软体手指单指模块末端力试验,采用上节所设计的固定支架固定软体手指,并使用测力计对软体手指末端所产生的力进行测量,其试验装置如图14所示。

图14 软体手指单指模块末端力试验装置
将软体手指与气动接口连接固定,检查气密性,通过固定支架将其固定到试验平台上,在试验过程中,将测力计的测头与软体手指末端始终保持垂直,目的是为了测取在该气压下软体手指末段能产生的最大的力。打开气泵,分别调节气压至10 kPa、20 kPa、30 kPa、40 kPa、50 kPa和60 kPa,每次调整气压都需等待气压值稳定5 s左右,在气压值稳定后,读取测力计上的数值并记录。多次试验取平均值,以保证试验数据的准确性。将试验数据进行整理并绘制成折线图,其结果如图15所示。
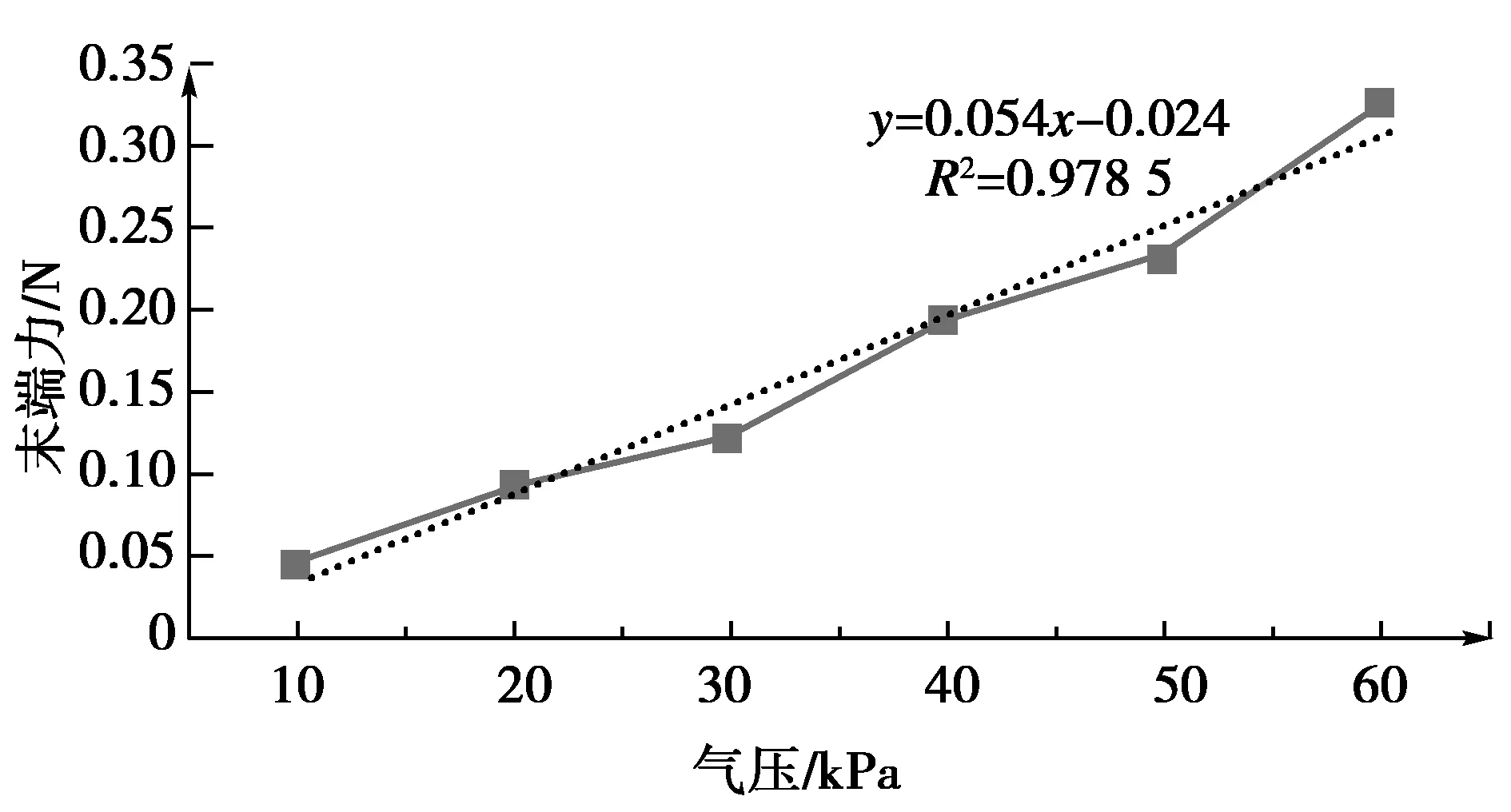
图15 单指模块末端力试验结果
从该折线图中我们可以发现软体手指单指模块的末端力与气压近乎成一种线性关系,对数据点进行拟合,可以得到如图所示直线,其中决定系数R2=0.978 5,拟合精度较高。决定系数R2为回归平方和与总离差平方和的比值,表示总离差平方和中可以由回归平方和解释的比例,其表明该组数据的拟合精度,该值越大越好,值越大说明对模型的拟合越精确,一般认为R2值大于0.8的模型拟合优度较好。得出该拟合后的直线后,就可以在抓取物体前大致估算出所需要通入的气压,能够保证该三指软体机械手在不损坏待抓取物体的前提下能顺利将其抓起。
5.3 多指软体机械手的应用试验
为了测试所设计的多指软体机械手是否能够适应不同的物体大小并进行夹持,设计了三指软体机械手的抓取试验,分别对圣女果、荔枝、油桃、柠檬和苹果等水果进行抓取,能够保持稳定且不对被抓取物体产生挤压使其表面受损。
多指软体机械手抓取试验的被抓取物体试验参数及实物抓取如图16所示:

图16 三指软体机械手抓取试验
在本次试验中,分别对五种不同质量、不同外表形状的水果进行了抓取,在60 kPa气压以内,该三指软体机械手最多能够抓取260 g左右的物体,在尝试抓取更重的水果时,该三指软体机械手在60 kPa的气压下已经不能稳定的抓取。
从试验中可以看出,本文所设计的三指软体机械手在抓取物体时可以根据被抓取对象表面形状的不同来适应,从而能够更加稳定地抓取物体,同时,因为该软体手指是整体均由硅胶制成,对所抓取物体具有很好的保护作用,在实际应用中可以很好地降低被抓取水果的受损率。