随钻方位伽马测井仪的设计与性能验证
2022-01-16王重云
王 重 云
(中国石油长城钻探工程有限公司录井公司)
0 引 言
在油气资源钻探中,随钻自然伽马测井方法已经得到了广泛的应用[1]。其原理是由于自然界的岩层中一般都含有数量不等的放射性元素,不同岩性的地层产生的射线强度存在差异,通过在钻进过程中测量地层的自然伽马值并传回地面,定向工程师可以识别地层岩性和油气储层,判断钻进是否在目标层位,并以此为依据进行地质导向。不过自然伽马测井也存在一定的局限性,当钻进到地层交界位置时,由于测量的是地层的总伽马,其数值是不同地层射线共同作用的结果,也就无法用于判断地层界面的方位特征。方位伽马测量方法则能够在钻进过程中提供井眼圆周不同扇区的伽马值,可用于分辨界面岩性结构,用于判定页岩储层的有机物质丰富度和黏土含量,识别煤层气的顶板和底板位置,在非常规油层定位与评估和煤层气开发方面有着极高的应用价值。
国外油服公司对随钻方位伽马仪器的研制开展较早,并投入了商业应用,具代表性仪器有斯伦贝谢公司的新一代近钻头方位伽马成像系统IPZIG、贝克休斯公司的多功能随钻仪器OnTrak、哈里伯顿公司的近钻头方位伽马成像仪器GABI以及威德福公司的方位伽马测井仪器SAGR等。国内虽然陆续有几家单位开展了研究与设计,并取得了一定的进展,但真正投入应用的并不多见,其中代表性的有中国石油集团测井有限公司、KeyDrill公司等[2-3]。
1 方位伽马测量原理
随钻方位伽马测井仪主要分为探管式和贴壁式两种结构[4]。探管式是把方位伽马测量部分设计成与MWD定向探管类似的结构,晶体用钨钢等材质作为屏蔽层包裹在里面,在屏蔽层切开60°~90°的开窗作为测量窗口,并利用姿态传感器确定扫描方位。贴壁式是在无磁钻铤的外壁开凹槽,在凹槽壁上做屏蔽层,将晶体与姿态传感器装入槽中,外面加装盖板防护。考虑到贴壁式结构对钻铤的密封性设计要求较高、钻铤对晶体的屏蔽效果存在方向差异等特性,而探管式结构相对更加简单灵活,因此本文的随钻方位伽马测井仪采用探管式结构。
在进行方位伽马测量时,方位伽马探管的微处理器首先采集姿态传感器的数据,并实时计算探管在当前姿态下的窗口中心线位置,将中心线位置与设定位置比较,即可确定探管正在测量来自哪个方向的伽马数据。如图1所示,当窗口中心线经过A1点并旋转到A2点时,测得的伽马计数为上伽马;当窗口中心线经过B1点并旋转到B2点时,测得的伽马计数为下伽马。在钻进过程中微处理器不断对地层伽马值和探管姿态进行计算,即完成了方位伽马的测量过程。

图1 上、下伽马判定示意
2 方位伽马测井仪的设计与功能实现
一套完整的随钻方位伽马测井仪由井下仪器、地面系统和工具软件三部分组成。下面对各部分进行具体介绍。
2.1 井下仪器
井下仪器是实现各项数据采集、初步处理、编码和回传等环节的硬件结构。通常由脉冲器、发电机、整流器、定向探管、方位伽马探管等部分组成。有的仪器没有发电机和整流器,而采用电池供电[5]。除了方位伽马探管,其他部分可以组成常规的MWD仪器。在石油行业中,脉冲器、发电机和整流器属于通用部件,一般采购专业公司生产的成品。因此,井下仪器的主要设计内容是定向探管和方位伽马探管。
定向探管的功能由电源板、传感器和微处理器板三部分实现。电源板的功能是将整流器输出的30 V电源转换为5 V和13 V,分别给传感器、微处理器板以及方位伽马探管供电[6-7]。微处理器的功能包括采集传感器原始数据、根据原始数据计算井斜和工具面等数据、根据标定值和温度值修正数据、接收方位伽马探管数据、存储定向探管和方位伽马探管数据、将需要回传的数据进行编码并驱动脉冲器动作等。
方位伽马探管主要包括晶体和微处理器板两部分,姿态传感器已集成在微处理器板上。微处理器板负责方位伽马、粘滑系数、动态井斜等参数计算,其PCB图如图2所示。考虑到测井仪未来会在四川页岩气区域使用,在设计上执行175℃标准,能够在300 r/min转速下实现方位伽马测量。方位伽马探管最高可实现16扇区成像,受钻井液脉冲传输速率限制,可选2扇区、4扇区数据进行实时上传。装配完成的微处理器板短节如图3所示。

图2 方位伽马探管微处理器板PCB图

图3 方位伽马探管微处理器板短节
2.2 地面系统
地面系统包括压力传感器、绞车传感器、钩载传感器、司钻显示器、地面解码箱及配套线缆等。司钻显示器采用防爆防水结构设计,适用于野外恶劣环境。为了确保在井场电压不稳的情况下能够正常工作,除了在使用时建议配备UPS电源外,在设计上也增加了防电气浪涌保护功能。司钻显示器内部运行WINCE系统,界面简洁美观,显示效果如图4所示。
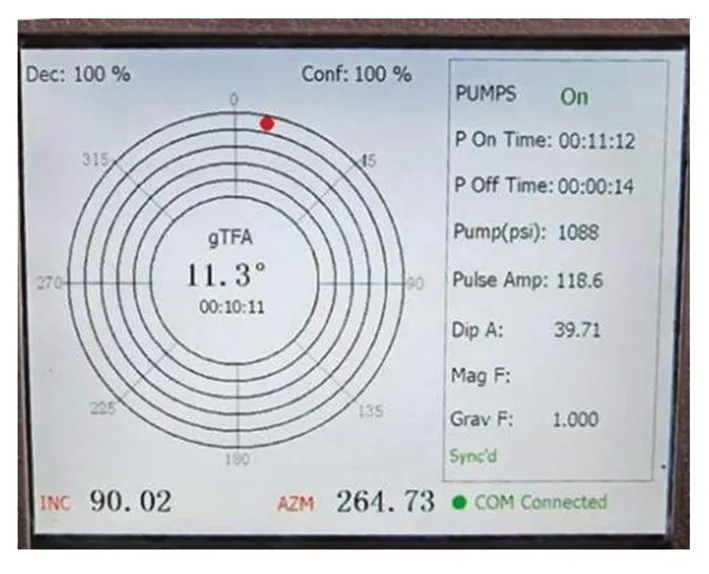
图4 司钻显示器的显示效果
地面解码箱主要功能是通信、给外围传感器供电、采集传感器信号、获取仪器数据和数据滤波等,采用FPGA实现。箱体外部留有各种传感器输入和通信接口。地面解码箱有工作和测试两种使用模式。工作模式是指仪器在井下工作,数据通过钻井液脉冲信号传回,信号被传感器采集后经隔离栅由FPGA进行滤波处理,处理过的数据经串口发送给工具软件,由工具软件进行解码,并通过地面解码箱传送至司钻显示器。测试模式对应的是仪器在车间内进行的各种数据交换操作,数据通过QBUS总线从仪器传给地面解码箱,再经串口发送给工具软件,此模式不需要解码,数据经过协议转换即可直接显示。地面解码箱的内部结构如图5所示。
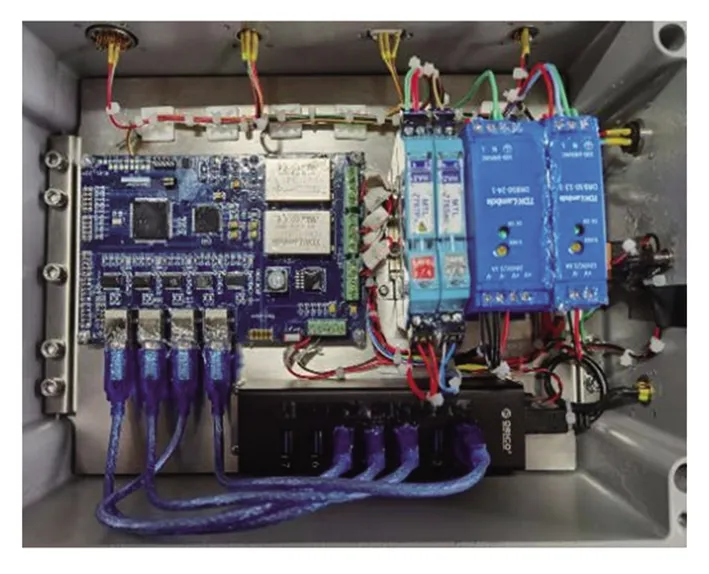
图5 地面解码箱的内部结构
2.3 工具软件
工具软件负责实现接收、解码、处理、显示和存储数据,以及写入标定与配置参数、绘制曲线与成像等功能,可以划分为5个功能模块,如图6所示。数据通信模块是软件的基础功能模块,通过地面解码箱和协议转换实现测井仪与工具软件的数据交换,软件不仅可以接收方位伽马测井仪的数据,对测井仪的配置参数也通过数据通信模块进行下发;刻度校准模块用于在测井仪组装完成后按照流程对测量结果进行校正,计算标定系数与刻度系数,确定识读结果与测量数据的映射关系[8];地面测试模块将软件接收的总线协议格式数据转换为独立的测量数据,计算后显示在软件界面上;解码计算模块通过地面解码箱接收传感器信号,对其进行解码和计算,修正后形成最终的伽马数据并显示;成像处理模块将数据绘制成曲线和图像,实现显示、出图或者保存为LAS文件。

图6 工具软件功能模块划分
3 方位伽马测井仪的刻度校准
新的随钻方位伽马测井仪必须经过刻度校准后才能使用,如果是故障仪器则应在修理后检定,若出现异常就需要重新进行校准。定向探管与方位伽马探管均需要进行校准操作,这里仅以方位伽马探管为例进行说明。刻度校准实质上是确立地层放射性强度参数与测井仪输出计数率关系,也就是确定、测定测井仪的响应灵敏度[9]。
一般情况下随钻伽马刻度校准采用的是两点刻度法,可以描述成截距式线性方程y=ax+b。
当测量对象的放射性为0时,测井仪读数必然为0,即当x=0时有y=0,故b=0,因而刻度方程可以进一步简化为y=ax。
由此可得:a=y/x。
按照一级刻度标准,y为高放层与低放层之间的差值(API);x为仪器在高放层与低放层之间读数的差值(CPS);a为刻度系数(单位是API/CPS),其物理意义为表示1个自然伽马读数所代表的工程值API数量,刻度系数代表仪器测量值向地层工程值的转换。
在本次校准中,所用放射源提供的高放层与低放层的射线强度差为362±2.5 API,调整方位伽马探管测点到放射源的相对位置,在测井仪稳定工作后分别采集高放层计数值和低放层计数值,如表1所示。
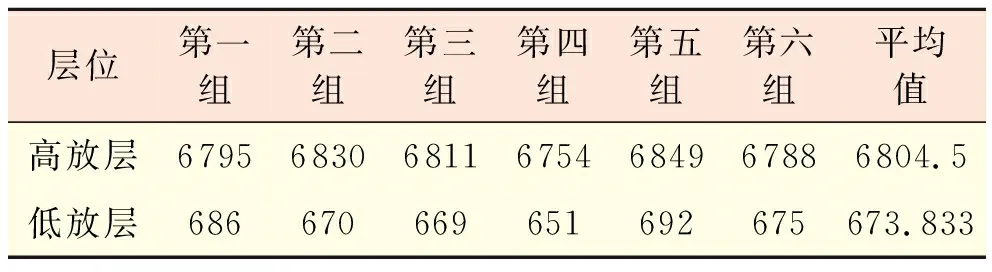
表1 高放层和低放层测量计数统计(100 s) CPS
计算刻度系数a的值(未标注单位)为:
将a值保存在软件中,供地面测试模块和解码计算模块使用。
必须指出,上文系指在室内研制中利用放射源进行刻度校准的过程,测井仪在工程使用前,还应利用刻度井进行校准[10-11],刻度井的常见结构如图7所示。对于工具软件来说,使用刻度井进行校准的操作步骤与使用放射源基本相同,这里不再赘述。
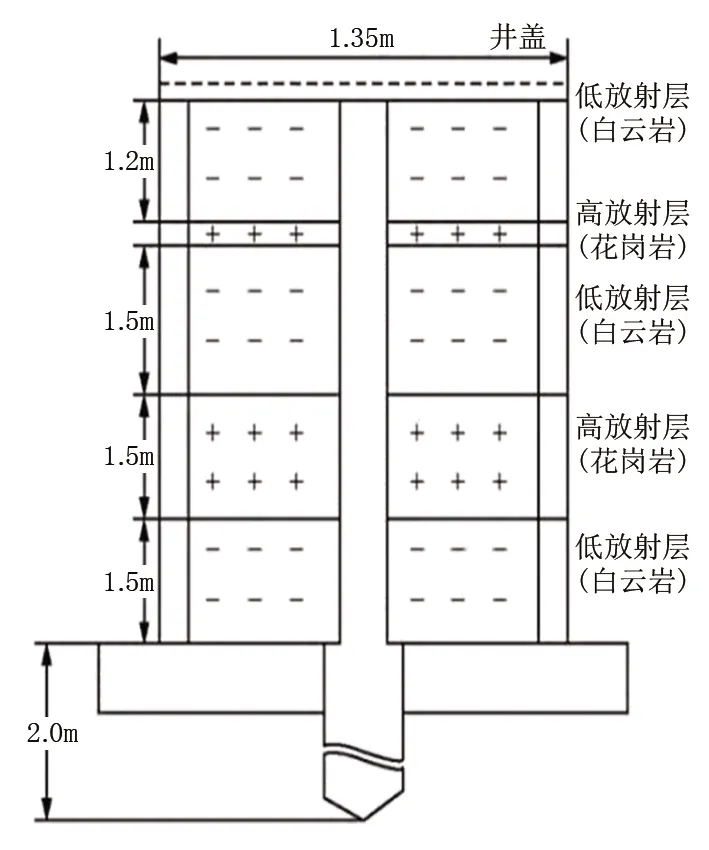
图7 常见刻度井结构示意
4 试验情况
为了检验随钻方位伽马测井仪的实际应用效果,在完成室内研制和标定刻度等环节后,项目组进行了旋转试验和下井试验。旋转试验结果如图8所示。旋转试验的目的是检查测井仪在不同的转速下能否正确测出伽马源的所在方位,如果测量的偏差较大,则需要对测量算法进行修正。可以看出,测井仪正确计算出了伽马源的所在方位。除了方位伽马测量功能外,方位伽马探管的测斜功能也需要验证,其井斜测点与定向探管井斜测点的距离为1.5 m。项目组在辽河油田雷61区块某井开展了现场试验。本次试验井段1 265~1 447 m,入井时间44 h,在试验井段中选取多点进行测量。在测深1 282.74 m位置,定向探管与方位伽马探管的测斜数据如表2所示。数据显示,方位伽马探管测量的井斜值与定向探管相比,最大偏差为0.027 2°,满足偏差在±0.1°以内的要求。试验期间井下仪器工作正常,各项数据测量准确,整套系统运行稳定,能够满足现场的施工需求。
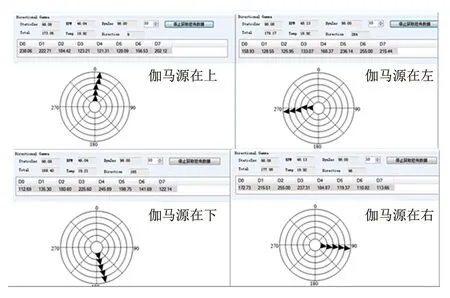
图8 测井仪对伽马源的方位检测测试

表2 方位伽马探管与定向探管测斜数据对比 (°)
5 结 论
随钻方位伽马测井仪的研制,有效解决了自然伽马测量仪在地层边界方位判断上的不足。利用方位伽马信息,井场工程技术人员能够准确判断地层倾斜角度和边界方位,及时掌握地层特征和油气藏分布,获得调整井眼轨迹的时间,解决地质导向入靶及水平轨迹控制难题,实现实时地质导向,降低钻井成本。现阶段,由于大多数随钻仪器接在螺杆后方,测点距钻头仍有10 m以上的距离,测量结果存在一定的滞后性。建议开展方位伽马测量前置研究,借助近钻头短节等方式实现测点前移,并利用无线短传技术向MWD回传数据,进一步提升地质导向的及时性。