表采模拟月壤箱姿态调整装置设计
2022-01-15刘晓飞高兴华罗春阳姜生元李建永
刘晓飞,高兴华,罗春阳,姜生元,姚 猛,李建永
(1.北华大学机械工程学院,吉林 吉林 132013;2.哈尔滨工业大学机电工程学院,黑龙江 哈尔滨 150006;3.中国空间技术研究院,北京 100081)
探月工程属于我国中长期科技发展规划重大专项[1-2],中国用长征五号运载火箭成功发射了嫦娥五号月球无人采样返回探测器,经地月转移、近月制动、环月飞行、动力下降等飞行过程,着陆月球,在19 h内完成了月面采样封装任务,获取了1 731 g月球样品,并获得了大量的月面采样邻近区域图像数据,可为科学分析嫦娥五号着陆点提供支持[3].探测器着陆姿态是决定表取月壤能否成功的关键.由于月貌不同,探测器在月面着陆时会产生不同的着陆姿态,为模拟探测器在不同姿态下的采样工作,需要通过姿态调整机构对设备进行调整[4-8].本研究采用半剪叉式连杆设计表采模拟月壤箱姿态调整装置.
1 方案设计
表采模拟月壤箱姿态调整装置由月壤箱单元、月壤箱定位托架单元、姿态角度调整机构、表取机械臂调整平台、月壤制备模块、测量与控制模块组成,机构方案见图1.模拟月壤箱由4个分体的月壤箱组成,每个分体月壤箱单独制备模拟月壤.月壤箱通过托架定位和锁定将其固定连接成一体,形成一个完整的表取区域,能够满足表取试验及监视相机成像需求.托架底部安装了姿态角度调整装置,通过控制系统控制,可以实现手动或自动角度调整;通过安装于托架底部的角度传感器反馈角度值,实现角度调整的闭环反馈控制.姿态角度调整机构实现高度升降及空间角度模拟;测量与控制模块完成箱体俯仰、侧倾调整;表取机械臂调整平台用于调整表取机械臂;模拟月壤箱顶部安装操作平台,为表取机械臂的人工调整提供操作员站立空间.
表采模拟月壤箱姿态调整装置为表取月壤提供模拟的工作环境和工作对象,用于模拟探测器在不同着陆姿态下的表取采样;使倾斜角度和升降高度与着陆器、上升器组合体模拟件的倾斜角度和升降高度相匹配;验证表采模拟月壤箱姿态调整装置在月面重力环境下的工作性能.表采模拟月壤箱姿态调整装置性能指标:表取月壤箱面积为3.5 m×3.0 m,深度为0.15 m;表取机械臂调整平台最大承重400 kg;平台台面尺寸为1.5 m×0.9 m;平台台面距着陆器顶面可调距离为0.7~1.2 m.着陆器顶板距离月面约1.87 m;在标称着陆工况下,以试验操作平台台面为基准,表取月壤箱模拟月面水平升降高度需求包络应在-0.020~+0.380 m.各主要模块设计指标见表1.

表1 表采模拟月壤箱姿态调整机构各模块设计指标Tab.1 Design index of lunar soil box for surface mining and its attitude adjustment mechanism
为提高稳定性及可靠性,电动升降机采用半剪叉式连杆支撑方式配合电动升降机组成姿态角度调整机构,该机构在偏载情况下受到的扭矩及侧向力均由半剪叉式连杆机构承受,电动升降机仅起到辅助支撑作用.姿态角度调整机构由固定支座、铰接支座、万向节、半剪叉式连杆和电动升降机等组成.固定支座为半剪叉式连杆的底部铰接支座,作用是将半剪叉式连杆与平台台面铰接连接;电动升降机底部铰接支座的作用是将电动升降机与平台台面铰接连接;半剪叉式连杆与月壤箱托架通过万向节连接;半剪叉式连杆是姿态角度调整的主要部件,其一端通过铰接支座固定于平台,另一端通过万向节连接月壤箱托架,利用电动升降机控制半剪叉式连杆开合角度,进而调整月壤箱托架高度及姿态角度.
2 理论分析
在姿态角度调整机构上建立坐标系.当重心位于yOz平面时,分析表采模拟月壤箱姿态调整控制装置的受力情况,见图2.

图2 姿态调整器受力分析Fig.2 Force analysis of attitude adjuster
表采模拟月壤箱姿态调整控制装置受3个支撑腿支撑力和重力作用.腿Ⅰ处受力为Fx1、Fy1、Fz1,腿Ⅱ处受力为Fx2、Fy2、Fz2,腿Ⅲ处受力为Fx3、Fy3、Fz3,自身重力为G.
将Ⅱ、Ⅲ处受力向Ⅱ、Ⅲ连线中心D点简化,由于Ⅱ、Ⅲ连线与x轴平行,得D点受力为FxD、FyD、FzD.
D点、表采模拟月壤箱姿态调整控制装置质心和腿Ⅲ上的1点处于yOz同一个平面上,此时表采模拟月壤箱姿态调整控制装置处于静止状态.对x轴列平衡方程:
∑Fx=0,FxD+Fx1=0, ∑Mx=0
(1)
求得
FxD=0,Fx1=0
(2)
因为重力G和1点受力[Fx1(0)、Fy1、Fz1]均在yOz平面,又
FxD=Fx2+Fx3=0
(3)
联立式(1)~(3)得
(4)
由式(4)可知:在仅有支撑腿Ⅲ的电动缸伸缩调节时,3个支撑腿上端球铰受力沿x轴方向可以相互抵消,即在研究支撑腿Ⅲ在极限状态受力时,可将支撑腿Ⅰ和Ⅱ的受力向yOz平面简化.
当支撑腿Ⅰ、Ⅱ保持初始状态,支撑腿Ⅲ收缩时,分析各腿受力情况(俯:-10°),见图3.表采模拟月壤箱姿态调整控制装置模拟结构件的最大边长为3个支撑腿均布安装位置所在圆周的半径,当支撑腿Ⅲ电动缸收缩时,表采模拟月壤箱姿态调整控制装置质心G下降并向右偏移.设表采模拟月壤箱姿态调整控制装置模拟结构件最大边长为L,支撑腿Ⅰ、Ⅱ、Ⅲ初始长度为各电动缸行程最大时的长度a,当平台向右偏转20°时,支撑腿长度缩短至b.由受力分析可得

图3 向右偏转10°等效Fig.3 Equivalent of 10 degree right deflection
式中:h1为质心下降高度;Δd为质心水平偏移距离.
表采模拟月壤箱姿态调整控制装置偏转10°时支撑腿的最短长度为b,即
(5)
(6)
此时,A点与C1点连线长度为

(7)
将式(5)~(7)代入
式中:γ为支撑腿与地面所成角度,∠CDE=∠CBC1.
设φ=∠EDC1=∠CDC1+∠CDE,可得
φ=∠EDC1=110°-γ
(8)
此时,D点与E点连线长度
(9)
在以表采模拟月壤箱姿态调整控制装置整体作为研究对象时,系统处于平衡状态.对D点列平衡方程:
(10)
∑Fz=0,G-FzD-FzBC1=0
(11)
∑Fy=0,FyD-FyBC1=0
(12)
联立式(8)~(12)得
FyD=FyBC1=FBC1cosγ,
FzD=G-FzBC1=G-FBC1sinγ,
式中:FBC1为支撑腿Ⅲ承受的作用力;FyD、FzD为等效力FD沿y、z轴的分力.
在以表采模拟月壤箱姿态调整控制装置作为研究对象求得FBC1、FyD、FzD后,将等效受力还原到初始状态.考虑到支撑腿Ⅰ、Ⅱ的受力情况,以支撑腿Ⅰ、Ⅱ作为研究对象进行受力分析,见图4.支撑腿Ⅰ、Ⅱ受力合成等效为D点受力.由上述条件求得
Fx1=-Fx2,
由于支撑腿Ⅰ、Ⅱ受力类似,我们单独研究支撑腿Ⅰ受力状况,见图5.

图4支撑腿Ⅰ、Ⅱ受力分析Fig.4Force analysis of support legs Ⅰ and Ⅱ 图5支撑腿Ⅰ受力分析Fig.5Force analysis of support leg Ⅰ
支撑腿Ⅰ处于受力平衡状态,将D1点球铰所受各力分别向平行于支撑腿底端铰链销轴轴线方向(记为R)和支撑腿转动方向(记为S)投影.设销轴对支撑腿反扭矩为MS1.对D1点列平衡方程:
∑FS=0,Fy1sin60°-Fx1cos60°=0
(13)
∑MS=0, (Fy1cos60°+Fx1sin60°)a-MS1=0
(14)
联立式(13)、(14)得
MS=MS1=2Fy1a,
式中:MS为支撑腿Ⅰ对销轴轴线方向产生的扭矩.
3 三维结构设计
表取月壤箱整体尺寸为3.39 m×3.89 m,采取3个矩形单元月壤箱体与1个五边形单元月壤箱体拼接.模拟月壤箱整体最大装载月壤总量为2 m3,质量约1 599 kg(密度为0.8 g/cm3).设计一个盖板将靠近探测器模拟件的月壤箱覆盖,再在上边安放一个小操作平台(平台台面尺寸为1.6 m×0.9 m).
姿态角度调整装置由固定支座、铰接支座、万向节、半剪叉式连杆和电动升降机等组成,见图6.三腿支撑方案采用3个电动升降机支撑,结构由动平台和固定平台及连接动平台和固定平台的3条运动支链组成.其中,3条运动支链的结构相同,每条运动支链由十字万向节、移动副和铰链组成,万向节的轴线垂直于移动副轴线及铰链轴线.当机构在原动件驱动下运动时,其动平台绕某一固定点作圆周转动.三支点结构简单,并且各运动支链的结构对称.
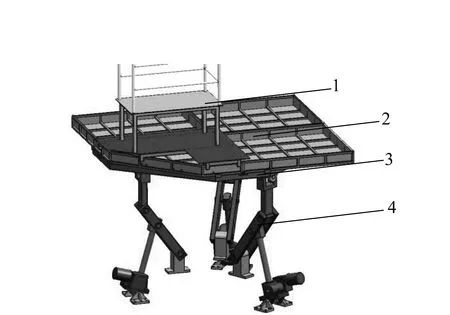
1.调整平台;2.月壤箱;3.月壤箱托架;4.姿态角度调整机构.图6 表采模拟月壤箱姿态调整装置Fig.6 Attitude adjustment device of lunar soil box for surface mining simulation
4 控制系统设计
表采模拟月壤箱姿态调整控制系统主要由控制器、电机驱动、角度传感器、电机、状态显示及遥控器等组成,箱体内盛装模拟月壤.姿态角度调整由3台电动升降机及其他机构构成.3台电动升降机采用周向120°分布,组成一个姿态调整平面,分别通过调整电动升降机升降高度实现平面的俯仰和侧倾姿态调节,模拟月面坡度.
表采模拟月壤箱姿态调整控制系统通过控制箱发出指令,可完成3台电动升降机上升、下降运动控制,实现箱体的俯仰、侧倾调整.表采模拟月壤箱姿态调整装置核心控制器采用性能及运算处理能力高的16位微处理器,通过电与气相结合的方式实现对系统的控制.微控制器负责接收表采箱检测传感器检测到的箱体角度状态,依据此信息判断箱体状态,发出控制指令,控制电路进行相应的调节动作.控制操作既可通过控制面板实现连续调节,也可由手持终端控制器进行遥控操作;运行过程姿态角度及运行状态显示于界面中,既可人为控制确定,也可通过设定完成控制.为了保证运行的可靠性,对3台电动升降机的驱动电路进行安全隔离设计;控制器留有安全可靠的备用通信接口,可增加其他手持操作器进行遥控操作;控制系统还具有异常运行报警及保护等功能.控制器系统见图7.
在表采模拟月壤箱姿态角度调整过程中,通过设定控制器期望角度参数,控制3台电动缸,驱动电动缸运动,调整月壤箱姿态角;通过三维角度传感器进行实时检测,送入表采模拟月壤箱姿态角度调整控制器,形成闭环控制,使控制更加精确.控制原理结构见图8.

图7表采模拟月壤箱姿态调整控制器系统Fig.7System of attitude adjustment controller for lunar soil box 图8表采模拟月壤箱姿态角度调整原理Fig.8Principal of attitude angle adjustment of simulated lunar soil box
5 小 结
本研究在调研原有平台姿态调整方法、原理的基础上,分析表采模拟月壤箱姿态调整机构运动规律,从方案设计、理论分析、结构设计和控制系统等多方面对装置开展研究.本文设计了表采模拟月壤箱姿态调整装置,考虑稳定性及可靠性,采用半剪叉式连杆电动升降姿态调整结构,并进行了理论分析;根据要求设计了控制系统,完成了实物搭建,并已应用于实际项目中.表采模拟月壤箱姿态调整装置完整地模拟了探测器在不同着陆姿态下的表取采样姿态,对于保证表取采样的稳定性与安全性具有重要意义,为月壤箱姿态调整提供了有效的研究数据.三自由度并联机构的动力性能对整个系统具有重要影响,其承载力与结构复杂性仍是未来研究的重点.
