AMT及其控制技术研究综述
2022-01-14陈赵伟戴建国朱建辉许善珍
陈赵伟,王 程,戴建国,朱建辉,许善珍
(淮阴工学院 交通工程学院,江苏 淮安 223003)
汽车作为目前人们日常生活中不可或缺的交通工具,也是能源需求和排放增长的主要贡献者,在其市场保有量不断攀升、全球能源不断枯竭及环保意识不断加强的大背景下,对其操纵性能、环保性和经济性的要求越来越高。
变速器作为汽车关键核心部件,其在汽车的操纵性、舒适性以及燃油经济性等方面起到了重要作用。随着电控技术、计算机技术和高精度加工技术的不断发展与应用,近年来,自动变速器综合性能取得了长足的发展和进步,其市场渗透率不断提升并呈快速增长态势,2017-2020年变速器年复合增长率在13%~15%波动,如图1所示,预计2022年我国汽车变速箱市场规模将达到3790亿元。
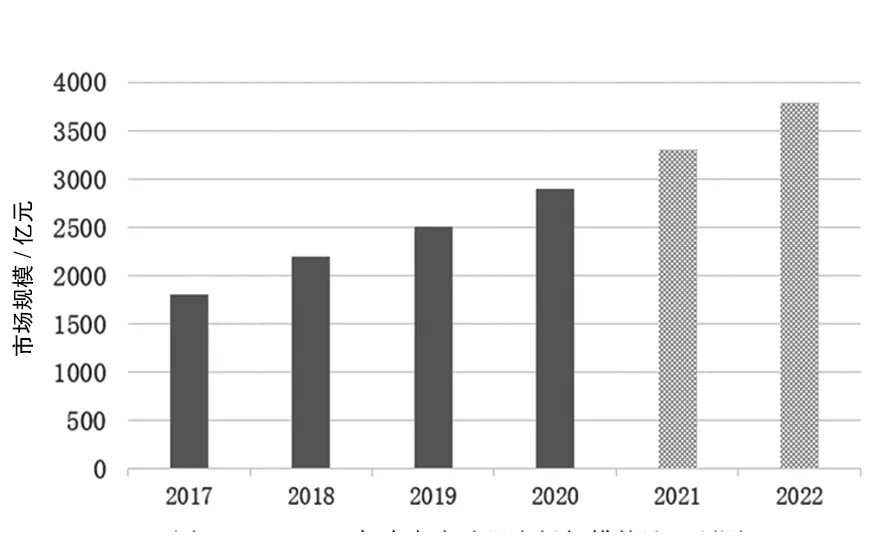
图1 2017-2022年汽车变速器市场规模统计及预测
目前主流的自动变速器有AT、AMT、CVT和DCT[1]。其中AMT具有生产成本低、生产继承性好、传动效率高、燃油经济性高等优点[2],在商用车领域获得了较好的发展。在新能源汽车领域,传动系统多挡化有利于提升车辆动力性和续航里程,AMT具有控制响应快、无离合器控制的天然优势,符合我国新能源汽车发展战略需求,发展前景广阔。但是,由于AMT的非动力换挡,换挡过程存在动力中断、换挡冲击大,控制参数多,控制技术复杂等问题,许多困扰其发展的关键技术还在深入研究。
1 AMT国内外应用现状
AMT的研究最早开始于20世纪60年代的欧洲,经过长时间的摸索,20世纪80年代奔驰和斯堪尼亚开发出第一代AMT产品,1989年AMT首次应用在IVECO轻型卡车上,20世纪90年代AMT逐渐占据欧美、日本商用车市场,并于2002年开始大规模装配,成为欧洲商用车型标配。目前欧美发达国家AMT商用车型普及率都已超过70%,主要采用奔驰Power-Shift变速箱、沃尔沃I-shift变速箱、采埃孚Traxon变速箱和马克m DRIVE变速箱[3]。在乘用车领域AMT主要被用于帕加尼、兰博基尼、轩尼诗和西尔贝的超跑车型中。
国内关于AMT的研究于改革开放后逐渐展开,由于研究基础薄弱,直到2008年重汽推出豪沃A7,AMT车型才开始出现在商用车市场上。2015年后,随着自动变速器逐渐成为市场的主流,我国商用车市场自动挡车型的需求的不断扩大。AMT在油耗、输出扭矩、传动效率等方面的优势使其越来越受到市场的青睐,装机率稳步提升。一汽解放J7、重汽汕德卡C7H、重汽HOWO T7H、上汽跃进H500、上汽C500等车型,均配备了重汽自主研发的AMT变速器。有分析认为2025年我国商用车AMT普及率有望达到50%[4]。在乘用车领域中,受AMT换挡品质及微型、小型车辆市场不断萎缩的影响,AMT变速器在乘用车市场上的表现不尽人意,至2020年,只有宝骏旗下有AMT车型在售[5]。但是,随着新能源车辆多挡化进程的推进,可以预见,AMT将在新能源乘用车领域有不错的表现。
2 AMT研究现状
针对AMT控制技术复杂、换挡品质不佳的问题,目前,AMT的研究工作主要围绕无动力中断换挡技术、多系统综合控制、智能挡位决策策略研究等方面展开[6]。
2.1 无动力中断换挡技术
通过换挡结构优化、控制参数优化是实现AMT无动力中断换挡的主要技术手段。
2.1.1 AMT无动力中断换挡结构优化
AMT动力传动系统的优劣影响着车辆行驶的平顺性与动力性[7]。在系统结构优化上,李丹等[8-9]讨论了使用多模可控换挡器(MCS)替代换挡同步器的新型UST动力传动系统,实现了AMT无动力中断换挡但仍然无法完全避免换挡冲击的问题。Kuroiwa等[10]针对换挡中的动力中断问题,在AMT换挡系统中增加辅助离合器,其结构如图2所示,在换挡时主离合器控制挡位的变换,此时辅助离合器电机推动辅助离合器和5挡结合,将发动机动力传递给车辆,作为换挡期间的动力补偿,直至换挡结束。王明等[11]调整后置式二挡AMT变速器的同步器将其布置与变速器第二轴,通过切换同步器与离合器减小换挡过程中的最大冲击度与滑摩损失,实现无动力中断换挡。
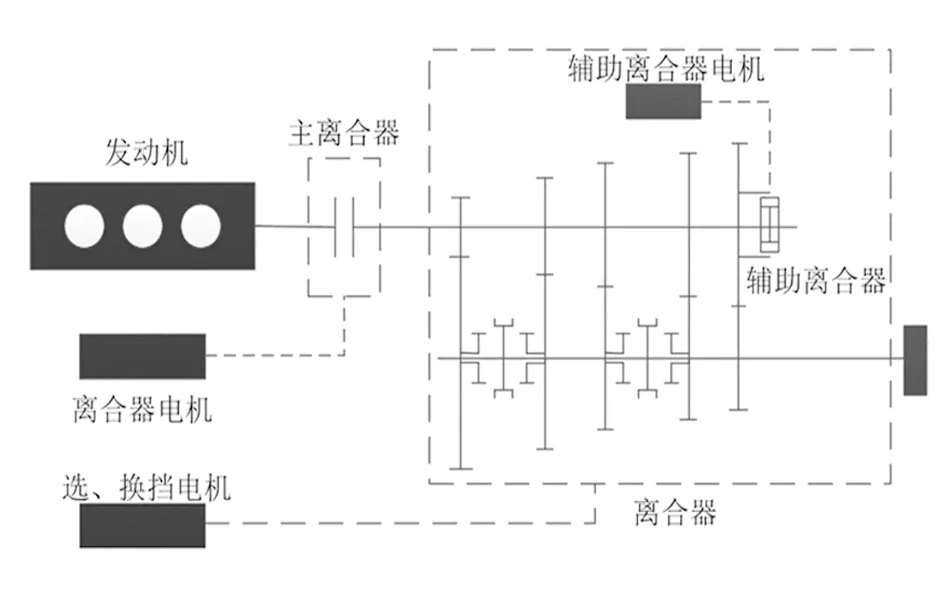
图2 转矩辅助AMT结构
随着越来越多的学者对AMT结构改进的不懈努力,在很大程度上提高了换挡质量,并以此出现了诸如动力补偿、结构布局改动等方案。与此同时,不少学者也将目光投射到以控制优化改善换挡动力中断上去。
2.1.2无动力中断换挡控制优化
针对离合器的非线性特点和执行机构在跟踪、控制等方面遇到的困难,目前主要通过控制参数优化以缩短换挡时间、减小换挡时的冲击度和摩擦损失,使离合器输出平顺无动力中断。
Saini等[12]使用遗传算法对离合器的工作效率和加速性能进行优化缩短了换挡时间提高了换挡动力输出的连续性。赵玉才[13]换挡执行机构使用PID控制器进行控制,提升了AMT离合器的换挡性能。李聪波等[14]提出新型换挡机构参数优化匹配方法,构建以冲击度和滑摩功为优化目标的多目标优化模型辅以灰狼算法进行优化求解,结果表明此方法能有效降低换挡过程中的冲击度和滑摩功,实现无动力中断换挡。Huang等[15]在驱动系统中集成多速变速器,提出了一种新型的双速行星自动手动变速器(PAMT),基于所提出的控制策略将换挡过程有序地分为五个阶段并通过控制个阶段电磁转矩降低纵向车辆制动和换档持续时间实现最佳换挡质量。Hu等[16]针对同步器齿套与齿圈啮合时动力中断时间长、冲击力大的问题,引入泊松恢复系数碰撞模型对换挡力、相对速度差、相对转角进行分析,得出换挡冲击随着相对角度绝对值的增加而逐渐增加,在换挡时套筒的角度变化不能滞后于齿圈的角度变化,并以此为基础实现无动力中断。
2.2 多系统综合控制
2.2.1驱动-传动系统综合控制
AMT变速器在换挡时遭受的困境在很大程度上是来自驱动系统在离合器接合时调速问题难以做到实时适应。在换挡期间发动机转速、转矩不但要保持相对稳定还要对变速器转速、转矩做出适应性变化,以求减小换挡冲击、提升换挡效率。
针对此种问题各大企业和专家学者都做出了重要研究,并在实际运用中取得了阶段性成果。何忠波等[17]通过控制发动机油路的通断实现在换挡过程中发动机转速的实时控制,但此方法忽视了惯性在控制过程中的不可控性,转速无法在短时间内达到指定范围。随着CAN协议逐渐开源,黄英等[18]将TCU和ECU采集的信号通过CAN总线实时共享,构建对转速和转矩的联合控制,其动力传动控制如图3所示,避免了转矩突变、减小了换挡时的动力损失、提高了舒适性,随着以混动车型为代表的多动力源车型的出现,通过电子节气门影响进气量进而控制发动机转速的方法已然处于边缘地位,动力传动系统的协调控制开启了新阶段。张炳力等[19]在设计了一种以转矩、转速双闭环控制为底层逻辑的自动换挡协调控制策略。梁亮等[20]发现了加速踏板开度超过一定值的时间比例与驾驶员的起步意图的联系,通过精确识别和量化驾驶员在不同驾驶道路条件下的起动意图协调发动机输出扭矩和离合器的接合速度,实现平稳起步。
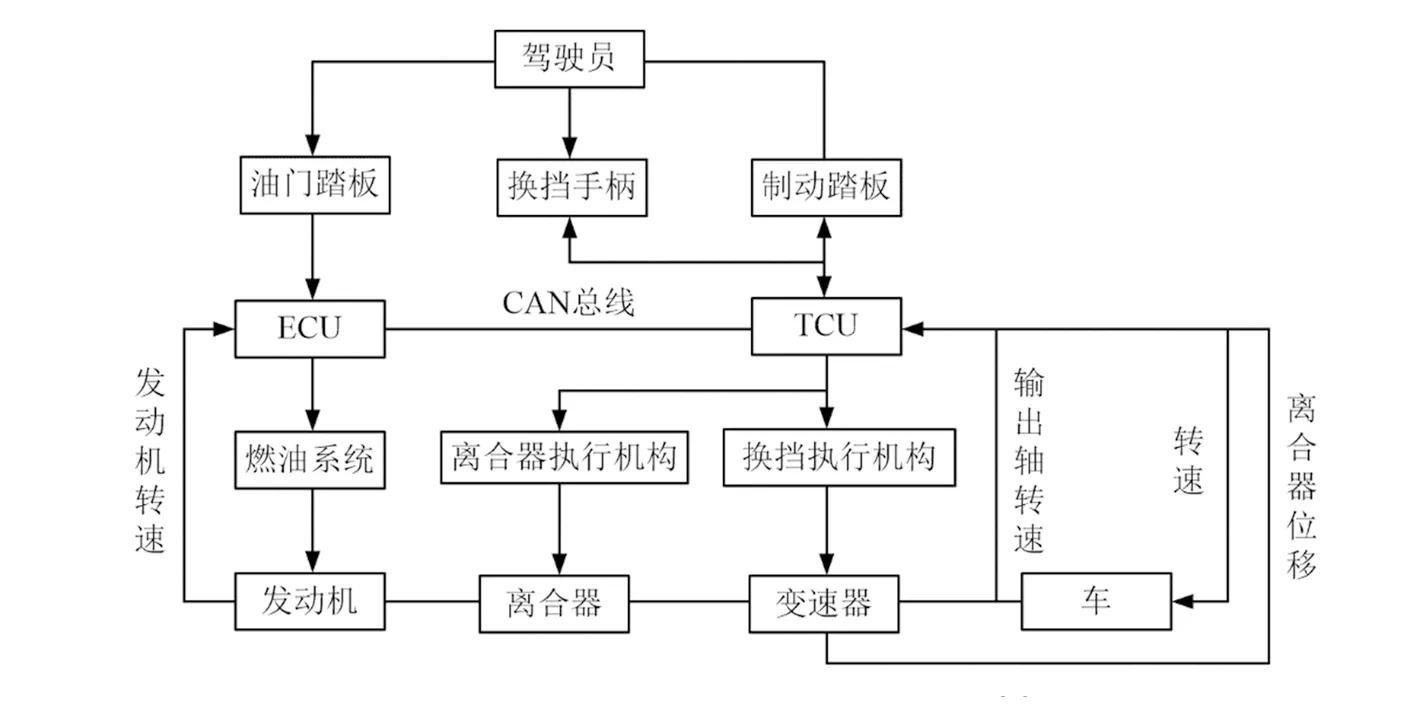
图3 基于CAN总线的动力传动控制系统
2.2.2驱动-制动系统协调控制
车辆在换挡过程中驱动与制动系统的协调控制是提升驾驶感受,确保行车安全性的重要方面。Zhang等[21]对Prius和volt中离合器个数和系统工作模式进行分析引入动态规划对离合器参数很换挡策略进行了匹配优化。现代集团对混动汽车动力模式切换过程中对离合器承受的压力进行闭环控制,确保了车辆在行驶过程中的稳定性[22]。张俊智等[23]在研究混动车辆动力混合度对换挡时机的影响规律和换挡后档位变化对混动车辆驱动系统工作状态影响的规律,提出混动车辆变速器换挡控制策略,解决了变速器换挡规律和驱动系统协调控制的问题。
2.3 智能挡位决策策略研究
AMT换挡规律受到“人-车-路”(驾驶员意图、车辆状态、行驶环境)的影响,如图4所示。传统的挡位决策策略聚焦的经济最佳挡位和动力最佳挡位已愈加无法适应日益复杂的驾驶环境。
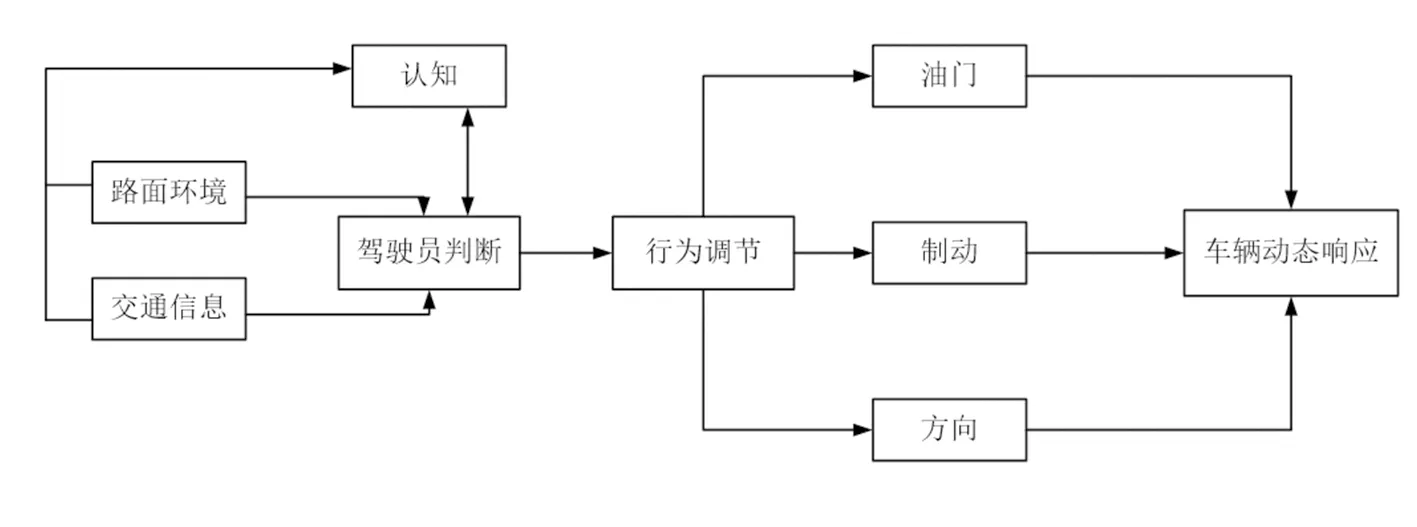
图4 人-车-路关系图
目前智能化换挡的研究热点是在挡位决策系统中加入神经模糊技术控制算法,将神经网络技术和模糊控制技术相结合,制定不同工况下的换挡策略。由于训练样本的数量限制以及无法进行动态训练来及时适应车况、路况和驾驶员特性的变化导致决策模型的精度较低,容易出现最佳挡位判断失误。因此对AMT挡位决策系统的优化研究就成为提高换挡准确性的关键。
陈清洪等[24]在三参数换挡模型中加入神经网络,利用经验丰富的驾驶员的驾车经验和专家知识对换挡模型进行训练,利用神经网络动态学习的特性提升了其适应能力提高了换挡准确率。焦海宁等[25]通过建立挡位决策-离合器接合控制模型,将神经网络应用到离合器接合控制上,实现了挡位判别和离合器分离的快速响应。任永强等[26]利用三参数换挡规律进行参数和算法优化,使用交叉熵代价函数取代传统的二次代价函数优化BP神经网络,提升了样本学习速度并且优化后也提高了决策模型的准确度。赵丁选等[27]提出在四参数换挡策略下,通过变步长法和动量梯度法向传播算法对BP神经网络进行改进,改善了其收敛速度慢、存在“局部最小值”的问题并且提高了传动效率,缩短了样本学习时间。
3 研究趋势
经过多年的研究与探索,AMT技术已取得了长足的进步,但其换挡性能、驾驶体验还未能达到DCT、CVT变速器的水准,应用上还只局限于部分商用车和微型车。在汽车工业智能化、网联化、电动化的发展潮流推动下,AMT技术正朝着换挡预测网联化、智能换挡动态学习与决策控制、直驱换挡控制、电机-变速器协调控制等方向发展,不断提高控制精细度和鲁棒性。
(1)换挡预测网联化。车辆在换挡前实现对路况、车况信息的精准把控,为车辆中央处理器提供数据支撑来实现车辆换挡智能动态决策始终是各大车企和院校的追求目标。因此研究车内通信、车际通信、云端通信三网融合技术将车辆作为网络节点提前感知路况、车况。研究数据在车内传输时的信息传输时延、失效以及云端通信时网络基站切换对车辆信息传输稳定性影响,利用反馈控制等手段提高抗干扰能力[28]。
(2)AMT换挡动态学习与智能决策控制。未来的车机协同方向必然是无人驾驶,通过车辆的整体网联化将实时数据载入控制系统实现车辆自主行驶。自动换挡系统作为整车控制系统中极其重要的子系统,将通过与数据实时共享辅以实时优化算法,解决自动换挡控制的不确定性问题,包括模型预测控制算法、神经网络算法、基于Pontryagin最小原理的控制算法以及解耦算法。根据车况、路况的实时数据反馈通过优化算法实现换挡的动态学习和实时决策控制。如图5所示,路况信息和车况信息通过车载互联系统传入车辆的中央处理器中,同时中央处理器与云端保持互联通过大数据进行优化匹配既为车辆做出最佳的换挡策略同时也利用其进行动态学习,通过控制器控制换挡执行器进行换挡。并且在此趋势下实时预测和车辆速度跟踪误差补偿[29]、减小换挡时执行器响应延迟、提高车辆下层协同控制的鲁棒性成为新一轮研究热点。
(3)直驱换挡控制。近年来,AMT换挡直驱技术愈加受到重视,出现了电液直驱、电磁直驱等多种换挡驱动方案,其中电磁直驱装置因其可实现较高集成度、拥有较高功率密度使得驱动力变化范围大,响应速度快成为换挡执行器的首选方案。图6为一种电磁直线执行器为换挡执行机构的AMT技术方案。目前电磁直驱AMT控制中所面临的换相推力波动、摩擦力估计与补偿、高精度定位以及高精度轨迹跟踪、多目标优化等问题成为新一轮攻关目标,而实时预测精度补偿、无传感位置预测方法[30]、点位最优运动控制、自抗扰轨迹追踪、显式抗扰控制[31]、基于伪谱法的多目标换挡控制优化[32]等技术已成为解决上述问题的研究热点。
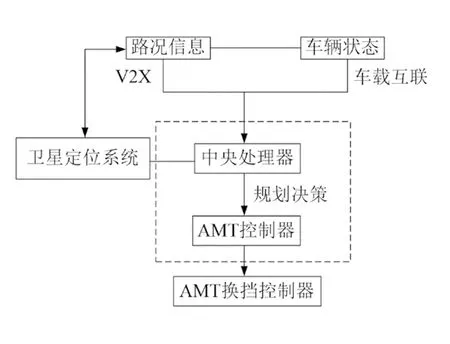
图5 整体控制架构
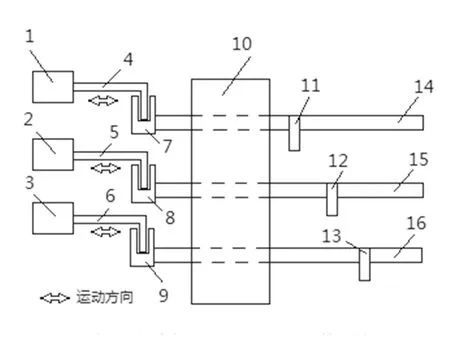
1、2、3:电磁直线执行器;4、5、6:换挡杆;7、8、9:拨块;10:拨叉轴座;11、12、13:拨叉;14、15、16:拨叉轴。图6 换挡执行机构示意图
(4)电机-变速器协调控制。清洁能源正在成为车辆动力的更优选,并且针对当前电池技术的局限性,车辆传动系统多挡化已成为提升车辆动力性和续航里程的有效手段。在新能源车辆多挡化控制中AMT技术具有动力性强、集成度高、全路况适应力强等特点、发展前景广阔。但也面临着起步离合器滑摩、换挡过程转矩突变、理想驱动特性、能量管理、电机调速同步时间过长等问题。而电机-变速器协调控制[33]是解决上述问题的关键。因此驱动电机-变速器联合同步控制[34]、驱动电机转速转矩双闭环控制、转矩变化率控制、驱动电机加载曲线优化、电机-变速器扭矩协调控制仍需在未来不断深入。
4 结语
随着当前对汽车经济环保、性能、驾乘感受等综合要求的提高,各厂商对离合器的研发投入也在不断加大。当前AMT变速器在商用车市场具有较大的增量空间,符合我国掌握AMT核心技术打破国外变速器技术垄断的战略需求。
目前,AMT在无动力中断换挡、驱动传动制动多系统综合控制和智能换挡预测技术中取得了跨越式发展。在汽车工业智能化、网联化、电动化的背景下,通过直驱技术、神经网络等技术手段不断进行控制方法的革新,AMT在未来时间内将进一步提升其综合性能。