基于9 轴传感器的智能轮椅的设计和实现
2022-01-14邬志锋姚树生齐攀
邬志锋 姚树生 齐攀
(广东交通职业技术学院,广东广州 510800)
1 概述
全国第二次残疾人抽样调查的结果表明我国大陆地区肢体残障人士近3000 万,每年由于外伤或疾病导致的肢体运动功能障碍新增患者约200 万人[1]。随着我国逐渐进入老龄化社会,肢体运动失能、半失能的老年人数日益增多,肢体残障人士得到了社会的广泛关注。若轮椅乘坐者的上肢体无功能障碍,其即可用上肢体运动控制电动轮椅出行,但是上肢体运动失能残障人士的出行问题一直是个难题。为了解决这一问题,近年来有研究者给出一些方案,如用身体微动作、眼部图像处理、语音识别、脑电信号等方式对轮椅进行控制[2-5],但这些方法有的操作过于复杂,有的操作不够人性化,有的控制效果不佳,有的响应速度慢。
针对以上弊端,本文基于9 轴传感器MPU9250 设计了一款适用于上肢体运动失能残疾人,通过点头和仰头控制轮椅启动、停止、加速、减速,通过头部的转动实现左转、右转的控制的智能轮椅,从而使轮椅的控制更简单更人性化,操控效果更稳定可靠。同时还可以通过对轮椅姿态的分析,判断当前所处的是上坡、下坡、平路、转弯,对轮椅的速度进行自动调节,提高轮椅的安全性,避免可能出现的误操作;通过对乘坐者头部动作、心率、体温的分析,判断其是否出现了焦虑、紧张等负面情绪,并据此控制轮椅是否要进行紧急限速、制动、刹车、报警,进一步提高轮椅的安全性;通过移动通信网络把穿戴式传感器采集到的人体体温、心率等生理参数传输到云平台,实时监控轮椅乘坐者的身体状态,利用云平台存储的历史数据进行大数据分析,对一些潜在发作的慢性疾病进行预警;家人可通过手机APP 等实时了解轮椅乘坐者的所处的位置和各项生理参数,系统构成如图1 所示。

图1 系统构成
2 硬件设计
2.1 姿态获取
乘坐者头部姿态、轮椅姿态既是本文控制轮椅运动的根据,为了更高精度获取运动中的轮椅的姿态,本项目采用了内置数字运动处理器的九轴传感器MPU9250 作为姿态感知器件。MPU9250 包含了三轴加速度计、三轴陀螺仪和三轴磁力计,使用姿态解算算法对以上9 轴数据进行计算即可得到物体在空间的姿态,电路如图2 所示。
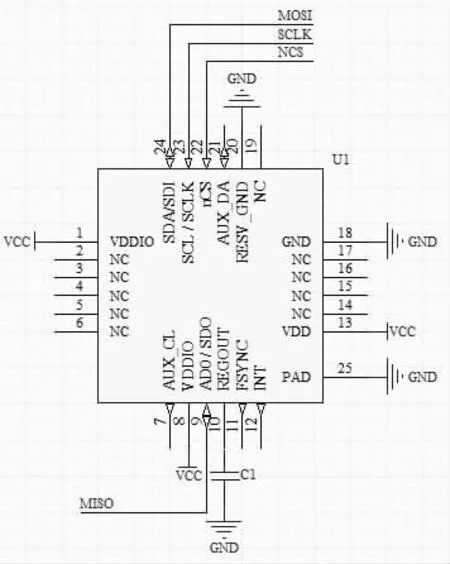
图2 姿态传感器
MPU9250 还具有体积小、功耗低的优点,非常适合本文系统的头戴部分和轮椅使用。
2.2 单片机选型
由于姿态解算的计算量大,而轮椅乘坐者头戴式设备的电池容量较小,所以本系统选用了意法公司的STM32L151 作为主控单片机。STM32L151 在休眠模式下所需电流仅为0.28uA,工作频率高达32MHz,内部拥有128KB 的Flash 程序存储器和32KB 的SRAM,此外其还集成了丰富的外设资源,有10 个定时器、3 个串口,多路GPIO 接口、2 个SPI、2 个I2C、ADC、DMA等,在嵌入式领域广泛使用[6],能够满足本系统低功耗、外设所需接口较多的需求,且意法公司官方提供了丰富的固件库和开发资源,编程极其方便灵活。
2.3 心率测量
心率作为人体最重要的生命体征之一,可以用来表征人的心理变化。本文拟采用欧司朗光电半导体推出的SFH7051 光学传感器采集心率信号,SFH7051 光学传感器专为心率监测应用而设计,其工作原理是用光照射皮肤表面,血液和周围组织分别吸收不同量的光,未被吸收的光则被反射回检测器,通过分析反射光的强度获得心率。SFH7051 内部由三个绿光发射器和一个光电二极管组成,该管在绿色光谱内具有非常高的灵敏度,而对于红外光,灵敏度则大受抑制,电路如图3 所示。

图3 心率传感器
该电路的工作原理是:SFH7051 内部的光电二极管将皮肤反射回来的绿光转换为电流,电流经运算放大器U4 转换成电压,该电压被单片机的AD 转换成数字信号进行心率的计算。
3 软件设计
3.1 姿态获取
本项目主要利用惯性测量单元测量乘坐者头部和轮椅的x、y、z 三个方向的加速度、角速度、以及磁力值,MPU9250 具有三个16 位加速度AD 输出,三个16 位陀螺仪AD 输出,三个6位磁力计AD 输出,基于四元数对三个量进行解算可以得到反应头部和轮椅的空间姿态,即获得头部和轮椅的航向角(Yaw)、俯仰角(Pitch)、滚转角(Roll)三个变量。实际测试表明解算出来的结果既使经过磁力计的校正也会存在一定的误差,尤其使当数据采集周期存在变动的情况下误差较大的异常值。本文使用了中值滤波的方法去除异常值,中值滤波法作为一种非线性平滑技术,它的原理是采用排序统计理论降低信号中的噪声,该方面对信号中的孤立噪声有很好的降低效果[7]。计算公式如式(1)所示:

程序流程图如图4 所示。
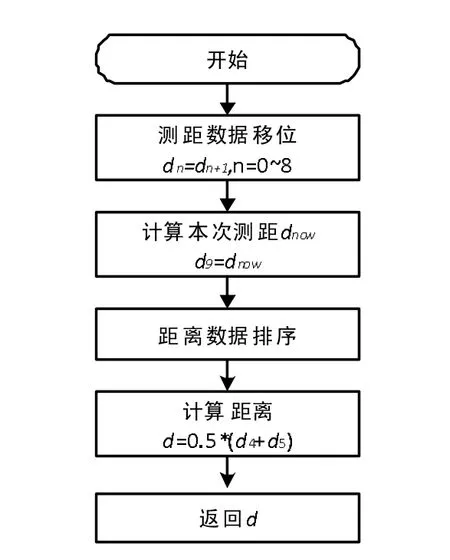
图4 中值滤波
3.2 轮椅运动控制
当乘坐者做出点头、仰头的动作时,头部姿态的俯仰角(Pitch)发生变化;当乘坐者左右转动头部把视线移向自己感兴趣的地方时,头部姿态的航向角(Yaw)发生变化。据此,把乘坐者的头部姿态和轮椅的启动、停止、加速、减速、左转、右转6 个基本动作结合起来,具体为:低头5 度~15 度:启动,低头大于25 度:加速,抬头5 度~15 度:减速,抬头大于25 度:停止。
转向控制的基本思路是以轮椅和乘坐者头部之间的航向角差(ΔYaw)为变量控制左右两个电机按照不同的速度运动,使轮椅发生转动,逐步缩小航向角差(ΔYaw),直至最后小于设定的阈值Ymin,实现轮椅运动的方向和乘坐者头部指向的方向一致(图5)。
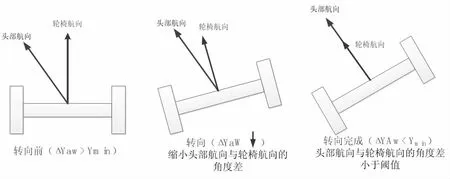
图5 转向过程
与启动、加速、减速、停止相比,左转和右转的动作是最频繁的控制,而轮椅的转动是通过左右两个电机的速度差来实现的,控制复杂。为了保证控制过程的顺畅,不发生强烈抖动,体现良好的操控性,本文采用了位置式PID 算法进行转向的控制。PID 算法具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点,其基本算法如图6 所示。

图6 转向控制
3.3 安全控制
智能轮椅一般都是电机驱动,与一般轮椅相比其运动速度快,尤其是在下坡、转弯等运动时,危险性更大;才外由于乘坐者存在紧张、焦虑等负面精神状态,可能会造成各种误操作;第三是乘坐者存在昏迷、失去操作能力等可能。所以智能轮椅的安全控制机制非常重要,但是从公开的资料来看,目前主要的安全控制主要有限制电机速度和增加防反转轮两种方式。显然这两种方式都不能很好地保证智能轮椅的安全。
本文构建了基于轮椅状态、乘坐者生理状态、乘坐者精神状态三者相结合的智能轮椅三维安全控制机制,程序框图如图7所示。
单片机首先通过轮椅上的姿态传感器识别轮椅是否处于下坡和转弯状态,如果属于这种状态,则适当进行制动或者限速,同时停止响应加速操作。然后测量乘坐者心率、体温和头部运动频率,分析乘坐者是否处于昏迷和失控状态,如果出现,则应该立刻进行刹车动作。最后通过融合采集到的心率、体温两个生物信号和头部运动,使用功率谱密度算法分析乘坐者的情绪识别,如果发现有负面情绪,则执行限制加速、报警等预先设定好的安全策略。
4 系统测试
本文设计的轮椅乘坐者头戴部分和改造后的电动轮椅控制部分分别如图8、图9 所示,装配好的轮椅如图10 所示。

图8
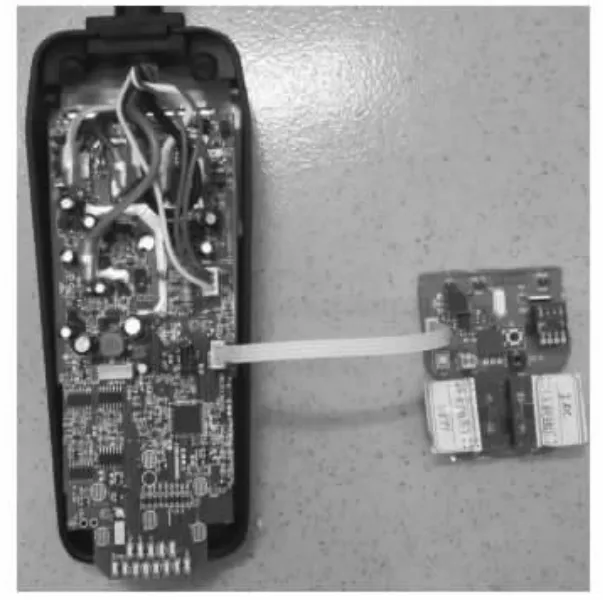
图9

图10
不同使用者的测试表明,本文设计的智能轮椅实现了乘坐者使用头部运动控制轮椅的运动,响应迅速,控制灵活,且运动操控感好,安全性高。
