弯道下车辆自动紧急制动系统分层控制研究
2022-01-13张森林邓国红
张森林,邓国红,徐 泽,欧 健
(重庆理工大学 a.汽车零部件先进制造技术教育部重点实验室;b.机械工程学院,重庆 400054)
进入21世纪后,乘用车数量不断增加,出行方式的多样化和自由化导致交通事故频频发生,平均而言,弯道上的事故率是直道上的5倍之多[1],研究还发现车辆在发生安全事故时多数为车辆追尾事故[2]。Ulke等[3]提出了一种基于车头雷达探测障碍物的前向碰撞预警系统,利用雷达对车辆前方区域进行实时监测,并通过相应软件对监测到的障碍物信息进行实时处理,最后传感器会将获取的数据进行计算得到自车和前车间的安全距离,当发生危险时向驾驶员发出警告。本田的CMBS系统使用毫米波雷达作为传感器来检测碰撞危险[4],检测车辆100 m范围内的障碍物,它会通过收紧安全带来提醒驾驶员,同时在碰撞危险无法避免的情况下,系统会接管车辆并输出最大制动减速度。近年来,基于无线技术的车辆间通信为车辆避撞的创新应用铺平了道路[5]。Minderhoud等[6]提出了碰撞时间的概念(TTC)。Kim等[7]通过V2V通信环境中数据来建立碰撞风险指数,将碰撞风险指数考虑进碰撞时间(TTC)作为确定避撞路径规划的标准,规划效率明显提高。Hong等[8]在现有自动紧急制动(AEB)的基础上增加了V2V通信,并进行了仿真验证。彭涛等[9]研究了高速弯道紧急换道避撞,但未对车辆紧急制动进行研究。兰凤崇等[10]将分层控制思维融入紧急避撞系统,从舒适性角度出发考虑预碰撞时间。
在弯曲道路上,由于A柱的影响,驾驶员视野存在一定盲区,这增加了发生事故的概率[11]。为了解决弯道中驾驶员由于判断失误导致的追尾问题,将针对弯道下车辆自动紧急制动控制策略进行研究。将弯道检测算法内置于探测系统,解决弯道探测相对距离不真实的问题并求出两车相对距离,然后计算出增强型剩余碰撞时间(enhance time to collision,ETTC),通过ETTC确定制动减速度以及制动阈值;下层控制器运用PID控制器提高验证模型的准确性。对弯道上的稳定控制系统进行分析和建模,主要包含稳定性控制系统中控制方法的选择、制动力分配系统的分析以及模糊控制器的建模,最后以中国新车评价协会测试办法为标准,提高测试车速进行仿真验证。最终得出较为理想的仿真结果。
1 上层决策模块设计
1.1 弯道相对距离
自车与前车在弯道上的相对弧距离ARD[12]如图1所示。
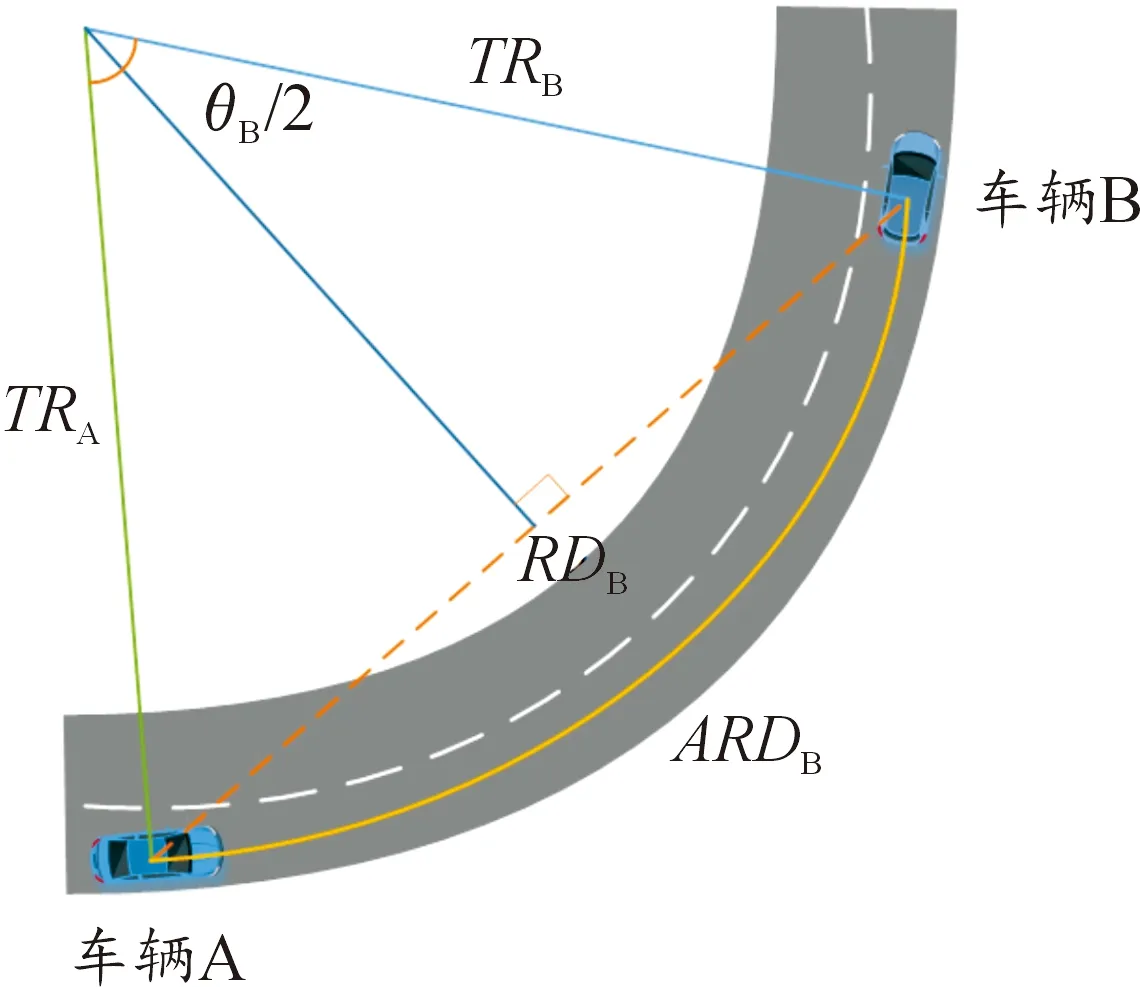
图1 两车相对距离示意图
可以看到自车的转弯半径为TRA,前车转弯半径为TRB,根据同车道车辆的转弯半径以及两车之间的圆心角θB可以计算出两车之间的真实距离ARDB。
(1)

(2)
该方法只适用于自车和前车在同一车道,对于自车的运动半径和前车的运动半径,当两者之间的差值小于车道宽一半时,认定为自车和前方车辆在同一个车道上,反之不在同一个车道,如图2所示。

图2 同一车道判定规则示意图
车辆环境监测如图3所示,以自车当前位置为坐标原点,以x轴方向为自车纵向方位,以y轴方向为车辆横向方位,车辆通过V2V通信技术将周围车辆与自车的位置信息进行交换,从而计算出其他车辆的方位角RA以及相对距离RD。
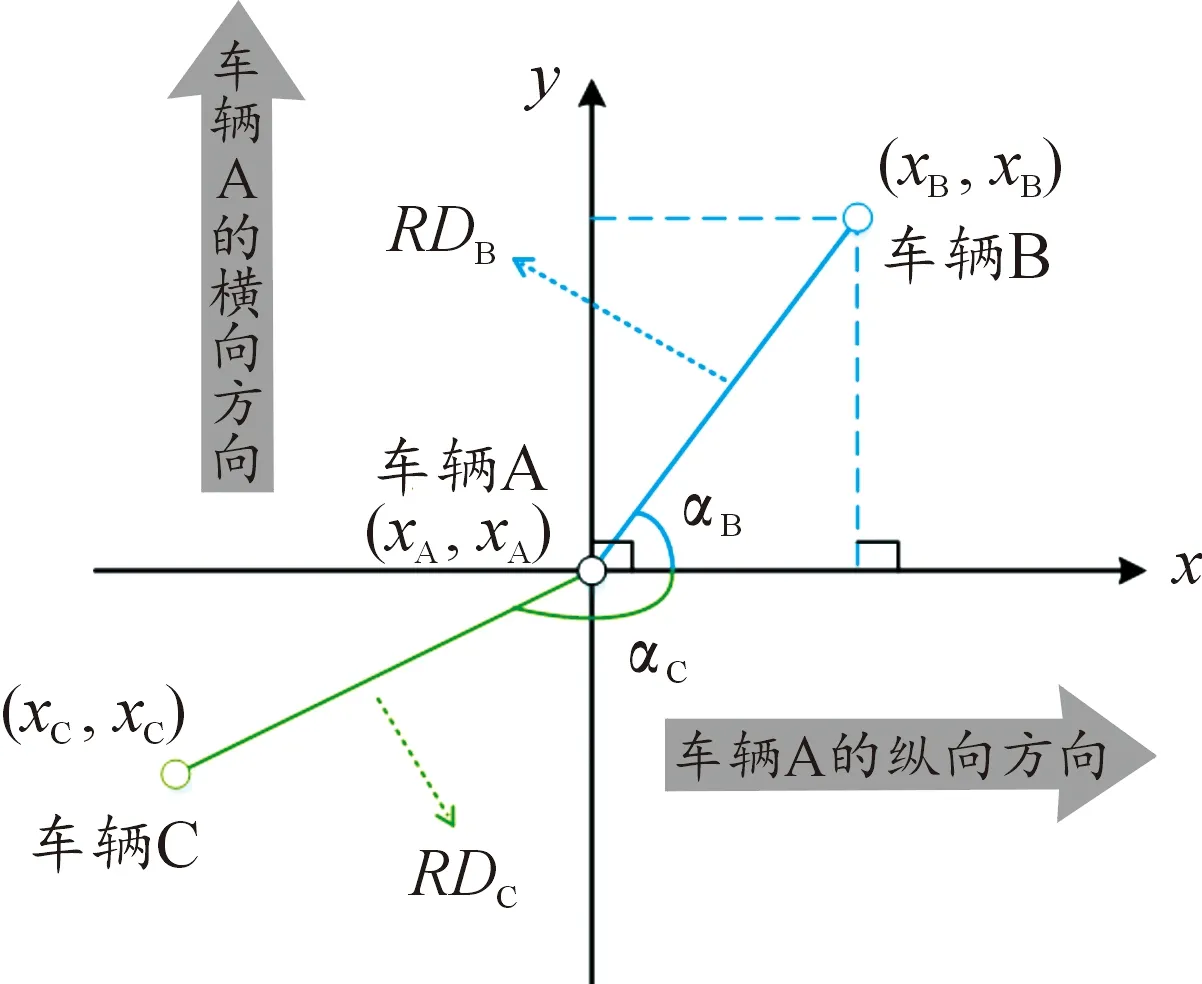
图3 车辆周围环境监测坐标系
其中αn为目标车辆的方位角,若前方车辆因静止不能被计算转弯半径,则可通过式(3)来估计它的运动半径。
(3)
1.2 计算增强型预碰撞时间
设计一个引入加速度的增强型预碰撞剩余时间模型ETTC,该模型是关于自车速度V1(m/s)、自车加速度a1(m/s2)、相对车速Vrel(m/s)、相对加速度arel(m/s2)和相对距离d(m)的函数,即ETTC=f(V1,a1,Vrel,arel,d)。下面用tE表示ETTC,d表示ARDn。
在理想状态下,当自车和前车各自匀速行驶时,两车之间的剩余碰撞时间为:
(4)
当前车在行驶过程中进行制动时,首先判断两车发生碰撞时,前车是否已经减速至静止状态。因此需要比较自车的剩余碰撞时间tE以及前车减速至静止状态所需时间t2。
在行驶过程中,两车发生碰撞时前车已经停止,此时t2≤tE,则满足:
(5)
若两车发生追尾碰撞时,前车还存在加速度且车速不为0,此时t2≥tE,则满足:
(6)
如果前车静止时,此时V2=a2=0,则满足:
(7)
增强型剩余碰撞时间在不同交通环境下取值不同,根据相对应的tE输入到上层决策模块,其结果较一般剩余碰撞时间TTC有更好的精确度。
1.3 确定制动减速度和阈值
车辆制动减速度a1的数值以及阈值关系到驾乘人员的舒适性和车辆行驶的安全性。合理选取制动减速度十分必要,在参考了美国高速公路管理局NHTSA分析的一批驾驶员制动行为后[13],得到表1所示的驾驶员制动减速度规律。

表1 驾驶员制动减速度规律
表1中最大减速度均值为-7.2 m/s2。由于紧急制动处于危险状况时才会触发,所以不考虑正常行驶下的平均减速度,期望减速度值设置为-7 m/s2。
一般情况下,制动系统的触发阈值为一个定值,不同减速度下制动时间占比如表2所示。
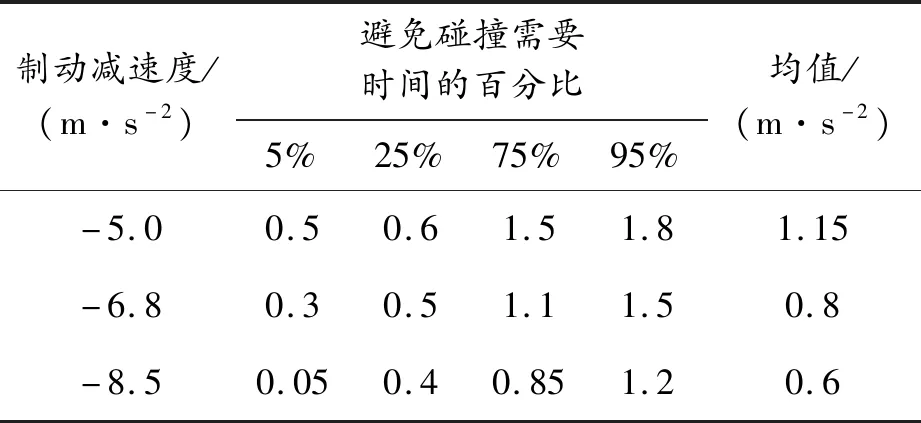
表2 不同减速度下制动时间占比
如表2所示,以-6.8 m/s2的制动减速度减速时,在1.5 s的时间内可以有95%的概率不发生碰撞,大多紧急制动系统都根据表2将制动减速度触发阈值定为1.6 s。但其只适用于较低车速下的紧急制动,本文将一般制动系统的制动阈值进行定值多样化,经过大量仿真实验得出使其匹配不同车速的制动阈值。
2 下层控制器设计
2.1 下层控制器结构
输入到下层控制器的期望加速度不可以直接输入到车辆模型,需要将其转变为制动主缸压力或者节气门开度再输入到车辆模型。为了使控制的精确度更高,采用PID误差控制器对车辆加速度进行控制。下层控制器结构如图4所示。
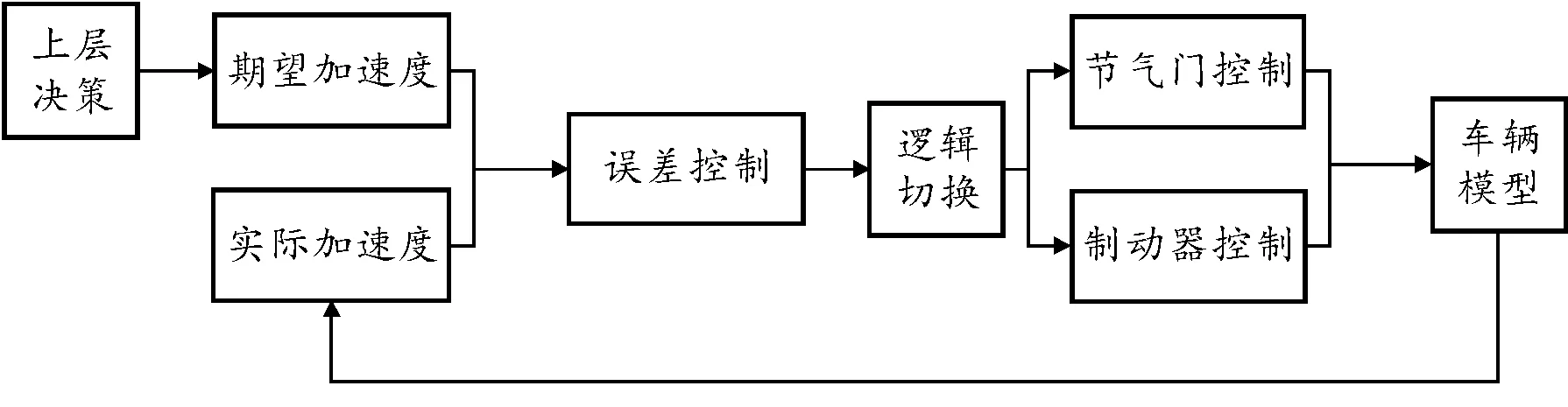
图4 下层控制器结构
2.2 车辆参数
为了较好地体现出控制策略的有效性和可行性,并直观地对车辆仿真效果进行观测,在Carsim中选取一款C级车作为车辆验证模型。参数如表3所示。
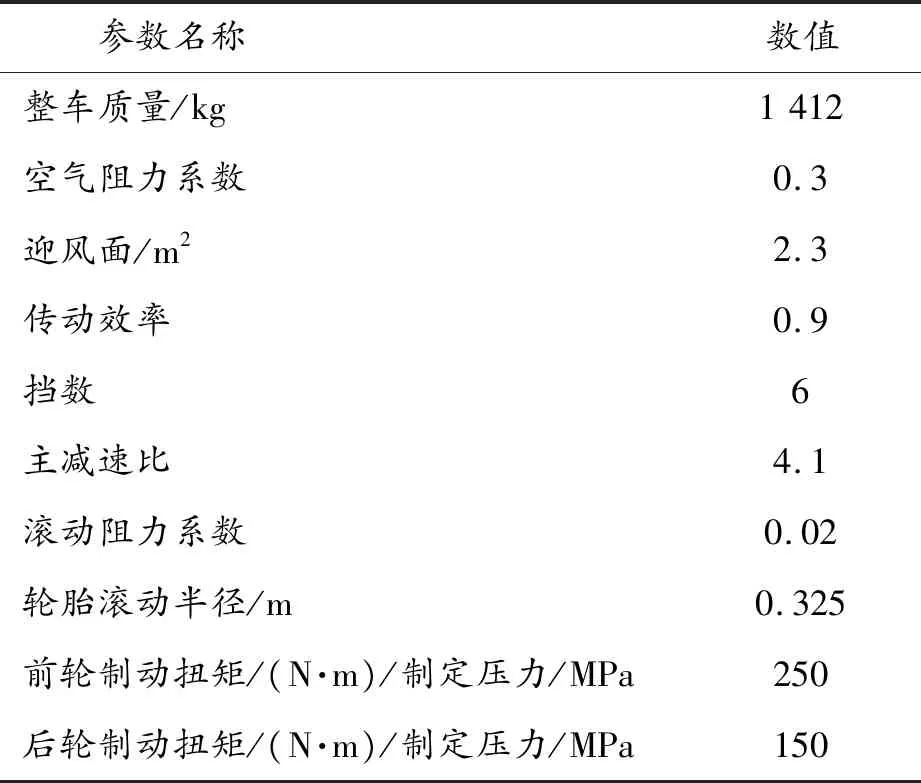
表3 车辆部分参数
2.3 逻辑切换和车辆控制
车辆在正常交通道路中行驶时,AEB系统会获取上层控制器输出的期望加速度,当车辆获取到的加速度为负值时需要减速制动,切换到制动系模块。接收到的期望加速为正值时切换到节气门控制模块。为了避免车辆行驶过程中在加减速临界点频繁切换,因此设置缓冲区间进行缓冲来提高车辆行驶的舒适性。
取不同速度下的自由滑行最大减速度将其进行拟合,作为切换逻辑临界线,根据经验在界限上下浮动0.1 m/s2作为缓冲带,如图5[14]所示。

图5 节气门/制动系切换逻辑缓冲带
当期望加速度在缓冲带范围内时车辆保持匀速行驶;当车辆期望加速度在切换逻辑带下侧时,车辆进行制动;当车辆期望加速度在缓冲带上侧时,车辆加速行驶。
2.3.1节气门控制
车辆的行驶速度和车辆的节气门开度有关。此处的节气门开度和车速关系可以从仿真平台上进行0~120 km/h下不同车速仿真得到,并将数据导入Simulink中。然后对节气门控制模块进行建模,车辆行驶速度和发动机节气门开度对应关系如图6所示。
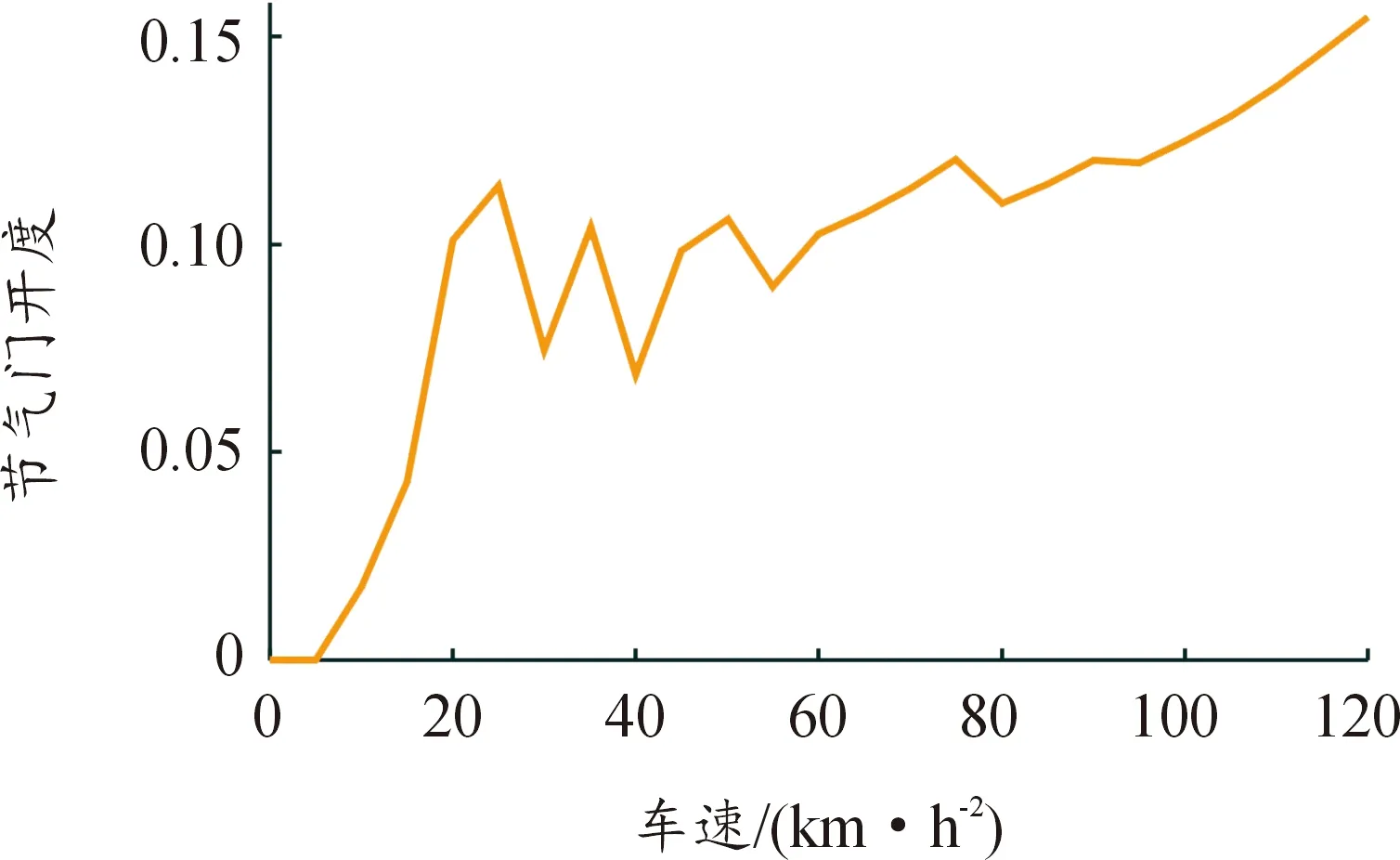
图6 不同车速下车辆的节气门开度曲线
2.3.2计算逆制动压力
车辆在水平直路上的受力分析图7所示,得出带有轮胎参数的车辆运动学方程如式(8)。
maexp=Fx-Fv-Rx
(8)
式中:m为整车质量;aexp为车辆期望减速度;Fx为轮胎所受的纵向力;Fv为车辆行驶风阻;Rx为车辆行驶轮胎阻力。

图7 水平路面车辆制动受力图
车辆在进入制动状态时车辆纵向力中的驱动力为0,此时只有车辆的制动力提供车辆纵向力,在自动紧急系统中该制动力为车辆的期望制动力,同时期望制动力与车轮的滑移率成正比[6]。
(9)
(10)
式中:sxi为车轮滑移率;rd为车轮的半径;ωi为车轮的角速度。每个车轮所能提供的纵向力可以通过Dugoff轮胎模型得出,即
(11)
(12)
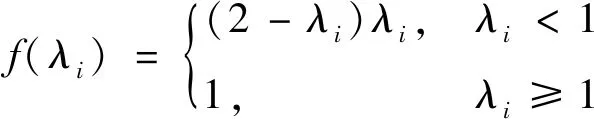
(13)
式中:Fzi为轮胎法向力;λi为轮胎动态参数;μ为路面附着系数;Csi为车辆纵向度。在平直的公路上行驶时所受到的空气阻力,即风阻可表示为
(14)
式中:ρ为环境空气密度;CD为空气阻力系数;A为该车辆的正面迎风面积;v为车辆相对于正面风的车速。行驶中的车辆所受的车轮滚动阻力Rx与法向载荷成正比关系,即
Rx=fFz
(15)
式中:f为滚动阻力系数;Fz为车辆轮胎的法向受力。对于车辆在平直路面进行制动时,根据车辆受力情况可得:
maexp=Ft-Fexp-Rv-Rx
(16)
式中:Fexp为期望制动力;Ft为车辆行驶过程中的驱动力,在平直公路上进行制动时驱动力为零,因此可以得出车辆的制动主缸油路压力为
(17)
式中:Kb为制动油路压力同制动力之间的比值,车辆在平直路面上行驶时,车辆在制动过程中当未超出路面所能提供的最高制动力时,制动的油缸压力和制动力呈线性相关[8],因此可以通过式(18)表示。
(18)
式中:Pb为制动主缸压力;r为车轮滚动半径;Tbr、Tbf分别为前后轮制动力矩。在Carsim仿真软件中,设置车辆在一条平直公路上进行制动,并观察其制动力和所对应的制动油路压力关系,可求得Kb。
2.3.3PID误差控制
为了减少上层控制算法输出的期望加速度和下层控制模型输出的实际加速度的误差,选用PID控制器进行调节。控制误差e(t)为输入的期望加速度和下层控制模型输出的实际加速度之间的差值,即e(t)=aexp(t)-av(t)。
控制规律为:
(19)
改写成:
(20)
式中:Kp为比例调节系数;TI为积分调节系数;TD为微分调节系数。在调节的过程中分别初始化为零,依次从零开始逐步逐个调节3个参数。最终确定的适合本验证模型的3个参数分别是Kp=3,TI=50,TD=0.02。
2.4 车辆模型验证
对已经建立好车辆逆动力学模型以及车辆模型的鲁棒性进行检验。期望减速度采取一级负阶跃输入,减速度大小为-3 m/s2,车辆的初始速度为50 km/h。仿真时间共5 s,其中0.5 s之前期望减速度为0,0.5~2 s输入的期望加速度值为-3 m/s2,余下时间将期望减速度定值成0,结果如图8所示。
从图8中可以看出,在初始加速度为0的阶段,期望加速度产生后,实际加速度以较快时间跟踪上,其中实际加速度出现轻微超调现象,但后期立刻跟踪上期望值。PID控制效果较为理想,可以使实际的加速度较为准确地对期望值进行跟踪。
3 横向稳定性控制
本文研究的弯道紧急制动必须要考虑到车辆是否出现侧滑,其中控制参数中以质心侧偏角和车辆横摆角速度为控制目标来控制整车横向稳定。运用模糊控制和DYC控制两者结合的方法控制车辆行驶从而达到回稳控制的目的[15]。控制策略总体结构如图9所示。由图9可以看出,该系统是将参考值误差作为输入变量,通过模糊控制系统和力矩分配系统最终控制横向稳定性。

图9 横向稳定控制结构框图
3.1 制动力矩
在制动过程中对施加在4个车轮制动轮毂上的制动力进行重新分配。在得到施加在车辆前后轮的垂直载荷压力之后,可以根据车辆前后垂直载荷之比以及车辆左右车轮的轮距来分配车辆前后车轮的制动力Ff和Fr。
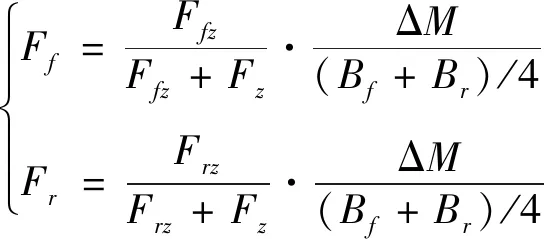
(21)
式中:Bf和Br分别为车辆前后车轮距离;ΔM为车辆失稳后所需的回稳力矩。采用同侧车轮制动回稳控制方法,因此所控制车轮前后回稳力矩分别表示为:
(22)
式中:ΔM作为车辆制动力分配模块的输入参数,输出参数为4个车轮所受的制动压力,由制动轮缸提供制动力。
影响补偿横摆力矩ΔM的关键因素是车辆横摆角速度、质心侧偏角的期望值和实际值的偏差值。下面通过车辆2自由度模型推导车辆横摆角速度、质心侧偏角的理想值。通过与Carsim中的车辆模型输出的实际值进行比较,最后经控制系统得到补偿横摆力矩ΔM的值。
3.2 计算期望横摆角速度
(23)
(24)
式中:K为车辆在行驶过程中的稳态参数。K=0时为中性转向,K>0时为不足转向以及K<0时为过度转向。车辆的最大侧向加速度不能超过当前路面所提供的能保持车辆不发生侧滑的横向加速度,即ay≤μg。又因为弯道上的车辆行驶状态接近圆周运动,所以车辆的侧向加速度可通过圆周运动原理近似表示为:
(25)
因此,车辆模型的横摆角速度理论值和最大值的关系是
(26)
仿真模型运行当中需要选取最大值ωrmax和稳态值ω中的最小值作为理想值,即
(27)
3.3 计算期望质心侧偏角
同理得到一个不存在横摆角速度ωr的方程,即稳态行驶下的质心侧偏角理想值:
(28)
(29)
车辆质心侧偏角受自身横摆角速度影响,同时车辆产生的横摆力矩也会影响到质心位置的变化,因此在最大横摆角速度ωmax的影响下质心侧偏角的范围为:
(30)
根据车辆在弯道上行驶过程所得到的理想值和为了避免车辆在特殊路面行驶发生失稳所设定的最大侧向加速度值,即式(31)中最大质心侧偏角和理论质心侧偏角中最小值得出βr。
βr=min{|β|,|βmax|}=
(31)
3.4 模糊控制
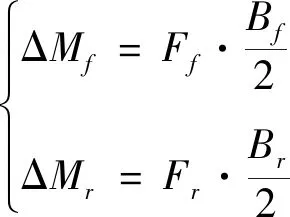
输入的参数为eω和eβ,将2个输入变量的模糊等级个数设置成5个,即输入变量的模糊子集可以定义成为{NB、NS、Z、PB、PS},其中各元素分别可以表示为负大、负小、零、正大、正小。由于该系统的输出变量个数为一个,因此设置该变量的模糊集合等级为7个等级,即模糊子集中共包含7个元素{NB、NM、NS、Z、PB、PM、PS},在该集合中NM、PM为负中和正中。为了使输入参数成功转化成模糊控制可以成功识别的模糊参数,引入比例因子keω、keβ和kΔM,分别表示为:
(32)
(33)
式中:n=5、m=7为模糊输入和模糊输出的等级数。选用三角形隶属函数,其函数解析式如式(34)所示。
(34)
在Matlab中使用模糊控制工具箱进行隶属度函数的设置,其隶属度函数和论域以及各元素和隶属度函数的关系如图10所示。
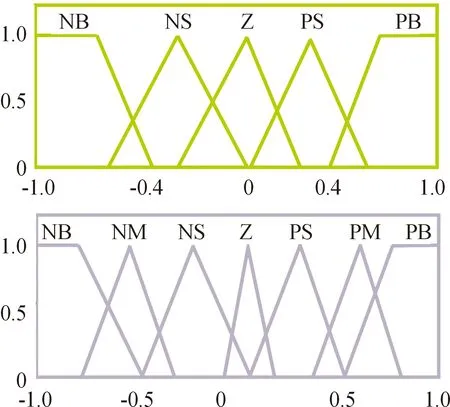
图10 输出参数的论域和各元素隶属关系
4 弯道仿真结果分析
根据C-NCAP评价标准,对弯道AEB系统分为3个工况进行仿真验证,分别是自车驶向前方静止车辆(CCRs)、自车驶向前方匀速行驶车辆(CCRm)和自车驶向前方制动减速车辆(CCRb)。
在Carsim仿真平台进行仿真环境的搭建,设置车辆行驶弯道半径为30 m,车辆行驶速度设定为55 km/h,-0.7g的制动减速度。仿真结果如图11~13所示。
图11 CCRs仿真曲线
从图11(a)中可以看出,在仿真进程为2 s时,车辆进入弯道,在横向稳定控制器的作用下,自车的加速度波动较小;在车辆制动结束后,由于车辆惯性的作用,会有加速度抖动但抖动较小,对于驾乘人员来说较为舒适。从图11(b)可以看出,在自车车速从55 km/h降到0,且未再有加速运动,证明自车成功完成了自动紧急制动。从图11(c)横摆角的变化过程可以看出,带有稳定性控制的车辆横摆角速度会更小。
在前车匀速行驶(CCRm)工况下,从图12(a)中可以看出,在仿真进程为2.1 s时车辆进入弯道,在进入弯道后带有稳定控制系统的车辆在控制作用下有一定的制动减速度。在仿真进程进行到5.6 s左右时,车辆AEB系统介入并开始进行制动,而带有稳定控制的仿真车辆预警稍后。图12(c)在ETTC=1.6 s时,开始进行紧急制动,制动结束后,ETTC值随着两车间距逐渐增大。
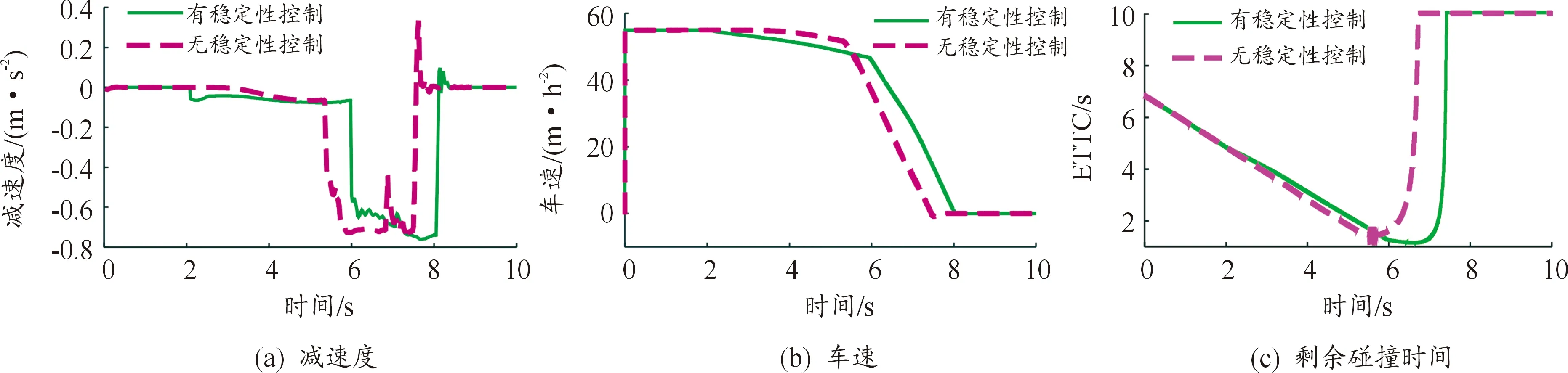
图12 CCRm仿真曲线
CCRb工况下,如图13(a)所示,在仿真进程进行到3.5 s左右时,车辆自动紧急制动系统发出制动预警信息并介入制动。图13(b)显示在稳定控制下车辆质心侧偏角处于安全范围,无稳定性控制的车辆在制动最后发生了侧滑,驶离出本车道。
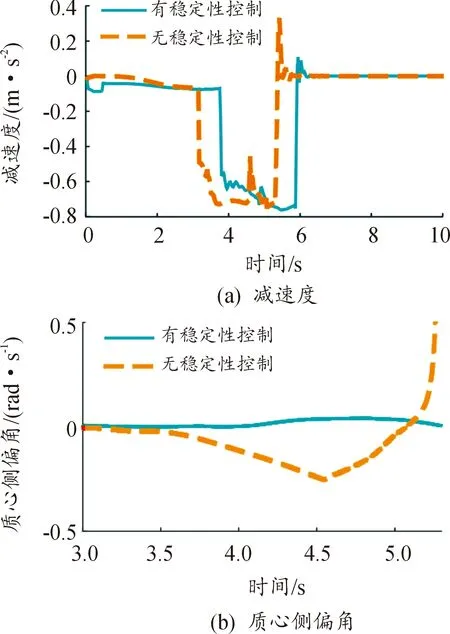
图13 CCRb仿真曲线
通过对C-NCAP里面3种工况进行的仿真验证表明:带有稳定性控制车辆的质心侧偏角以及横摆角的变化量始终处在安全范围内。
5 结论
1)在弯道上,由于传感器自身局限性并不能监测到两车实际距离,会导致AEB在弯道上失效。本文研究了适用于弯道的两车实际相对距离ARD。
2)考虑了在弯道上进行紧急制动可能会导致车辆发生侧滑甚至侧翻,设计了横向稳定控制器,并对比分析结果。
3)对小半径或者道路曲率半径变化较小的弯道有一定适用性,对弯道上车辆自动紧急制动避撞研究有一定指导意义。