舰船往返拦截搜索发现概率计算公式的推导、检验和修正
2022-01-13屈泽均
张 会, 王 安, 程 健, 屈泽均
(1.海军潜艇学院,山东 青岛 266199;2.青岛大学 自动化学院, 山东 青岛 266071)
搜索行动决策是舰船海上作战行动决策的重要内容。根据任务背景和行动策略的不同,舰船海上搜索行动主要有检查搜索、应召搜索和巡逻搜索3种。直线往返搜索作为巡逻搜索的一种基本样式,因为组织简单,在部队演习训练和海上封控行动筹划中运用广泛。而作为作战双方博弈的重点,更复杂的巡逻搜索样式和搜索策略则是作战决策理论研究的重点。
可靠的搜索效能评估是搜索行动优化决策的基础。舰船搜索效能评估方法主要包括仿真方法和解析方法两类。已有的舰船搜索行动效能分析方法包括单舰船往返搜索发现概率计算的仿真方法[1]、单舰船往返搜索发现概率计算的解析方法[2],以及其他样式的搜索行动效能评估的仿真和解析方法[3-4]。
随着协同作战和无人集群系统技术的发展,编队和协同搜索行动决策成为搜索行动决策技术研究的热点。为降低研究难度,一般使用仿真方法构建编队和协同搜索效能评估系统[5-6],采用这种方法可实现对编队样式和协同策略的灵活设计。由于仿真方法计算复杂度高,当搜索平台数量较多时只能通过人为的模式将搜索优化限制在相对很小的空间内,难以保证方案优化结果的可靠。
为实现高效的编队和协同搜索行动效能评估,出现了以单平台搜索效能计算解析方法为基础的多平台协同搜索效能评估和方案优化方法[7],这种方法的研究对单平台解析计算方法的可靠性提出了更高的要求。已有单平台搜索行动效能解析计算方法多为近似方法,计算结果的可靠性没有保证,因此限制了其在编队和协同搜索行动效能评估和方案优化方法研究中的应用。
作为多平台搜索效能评估方法研究的基础,本文建立模型进行单舰船往返拦截搜索发现概率计算公式推导,并使用仿真方法对其正确性进行检验。
1 单舰船往返拦截搜索发现概率计算模型
拦截搜索,也称线搜索,即在作战海区设置拦截阵地,舰船在阵地内按照一定的样式机动搜索,意图发现从该作战海区经过的目标。为便于分析,进行拦截搜索效能分析时可将搜索者的机动过程简化为分段的匀速直线运动。
拦截搜索是一种常见的对运动目标的搜索行动。如果事先能根据目标任务方向、类型和作战海区水文条件等确定目标的机动方向、机动速度以及目标的通过位置和通过时间范围,则可将拦截搜索效能分析问题抽象为一种典型的拦截搜索效能分析问题,即目标航向和速度已知,目标通过位置和通过时间均在一定区间内均匀分布情形下的拦截搜索发现概率计算问题,称为典型拦截搜索发现概率计算问题。针对典型拦截搜索发现概率计算问题所进行的研究,可在一定程度上揭示拦截搜索行动的一般规律。
对于典型拦截搜索,当搜索样式为单兵力往返搜索时,有一个常用的效能计算公式[2],本文使用“基于有效相对搜索区分析” 的方法对该公式的计算原理进行分析,并编制仿真计算程序对其进行检验,发现其计算结果误差较大。为消除或减小计算误差,通过进一步分析对计算公式进行修正,使用仿真方法验证修正后公式的正确性。最后对使用“基于有效相对搜索区分析” 的方法进行一般样式或多舰船协同的拦截搜索发现概率计算的难点进行分析,给出了开展研究工作的思路。
所谓经典往返拦截搜索,指的是搜索者的搜索线为一条与目标机动方向相垂直的直线段,搜索者在搜索线上往返机动,搜索者搜索线覆盖范围与目标通过搜索线的位置范围一致,搜索者搜索时间范围覆盖目标通过搜索线时间,目标通过位置和通过时间均在各自可能取值范围内均匀分布的一种拦截搜索情形。
经典往返拦截搜索的搜索过程如图1所示,目标以某速度自上向下机动,设置一条与目标机动方向垂直、长度为L的搜索线AB,搜索舰船以某速度在搜索线AB上往返机动,搜索舰船发现目标当且仅当目标在某个时刻进入舰船探测扇面。作为经典搜索,假设目标通过搜索线的位置在搜索线AB上均匀分布,通过时间在区间[Tx,Ts]内均匀分布,其中Tx、Ts分别为目标通过搜索线的最早和最晚时间。

图1 往返巡逻拦截搜索过程示意图
2 基于有效搜索区分析的单舰船往返拦截搜索发现概率计算方法
运用相对运动原理,可以将典型情形下的拦截搜索发现概率计算转化为求“搜索舰船有效相对搜索区面积与目标可能位置区域面积的比值”,然后通过对搜索者有效搜索区分析得到拦截搜索发现概率的解析计算公式。
2.1 基于有效搜索区分析的搜索发现概率计算原理
将搜索者的探测范围简化为一个圆形区域,则搜索者机动一个直航段,其探测圆扫过的区域为一个胶囊形区域,称为搜索者该直航段的搜索区,如图2所示。图2中,搜索者对目标的探测距离为ds,直线段P1P2为搜索者的一个直线航迹段。搜索者航段P1P2的搜索区为一个半径为ds的半圆Q1W1Q2、一个宽度为2ds的矩形Q1Q2Q3Q4和一个半径为ds的半圆Q3W2Q4组成的胶囊型区域。

图2 单航段搜索区示意图
搜索舰船机动多个直航段,所形成的搜索区就是所有其单航段搜索区的并,如果是多舰船联合搜索,则搜索区就是全部舰船的所有单航段搜索区的并。
显然,不论是单舰船搜索还是多舰船联合搜索,如果目标不动,搜索者能发现目标当且仅当目标位于搜索者搜索区内。如果目标静止不动且位置在某个区域内均匀分布,则搜索者发现目标的概率等于“搜索者搜索区位于目标可能位置区域内部分的面积”与“目标可能位置区域面积”的比值。为简洁,以下称“搜索者搜索区位于目标可能位置区域内部分”为“搜索者的有效搜索区”。
2.2 单舰船往返拦截搜索发现概率计算公式推导
为了将搜索区概念用于拦截搜索发现概率计算,运用相对运动原理对拦截搜索过程进行分析。具体就是“将目标看成不动,分析搜索者的相对运动所形成的搜索区,即相对搜索区”。
(1)往返拦截搜索相对搜索区和目标可能位置区域
以图1中情形为例,将搜索者某次位于搜索线左端点时刻定义为0时刻,将目标看成在其0时刻位置不动,绘制出搜索者的相对机动航迹段及各航段搜索区如图3所示。图3左侧从下向上的两个相对运动速度合成三角形,分别为搜索者从左向右机动和从右向左机动时的搜索者相对运动速度合成三角形,其中,Vw、Vm、Vx分别为搜索者运动速度向量、目标运动速度向量和搜索者的相对运动速度向量。
从0时刻开始,搜索者从左向右机动时,由相对运动速度合成三角形可以得到,其相对运动方向为oA1方向,到达右端点后,搜索者改为由右向左机动,相对运动方向变为A1A2方向,然后搜索者再从左向右机动,……,如此往复,搜索者的相对搜索区为由这些直航段所形成的胶囊型区域组成的多个胶囊型区域的并。从0时刻开始的3个搜索单程,搜索者的相对运动航迹为折线oA1A2A3,相对搜索区域则为图3中的3个胶囊型区域的并。

图3 相对有效搜索区和目标可能位置区域示意图
如图3所示,以搜索线左端点为坐标原点,以水平向右的方向为x轴正向,建立平面直角坐标系,则目标0时刻位置横坐标取值范围为[0,L],再由目标通过巡逻线时刻范围[Tx,Ts]推算目标0时刻位置纵坐标范围为[VmTx,VmTs],故目标0时刻的可能位置区域为一个矩形,如图3中矩形oE1E3E2所示,该矩形面积为
S=L(Ts-Tx)Vm
(1)
由对典型拦截搜索目标通过位置和通过时间的假设可知,目标0时刻位置在矩形oE1E3E2内均匀分布。
如果目标通过时间范围区间长度为其一个巡逻单程时间的m倍,则搜索舰船一个巡逻单程对应的目标可能位置区域为

(2)
式中T为搜索舰船一个巡逻单程时间。
(2)往返拦截搜索发现概率计算公式推导
下面分析搜索者的有效搜索区面积,也就是相对搜索区位于目标可能位置区域内的面积。观察搜索者0时刻后的第一个搜索单程的相对搜索区,即相对运动航迹线段oA1的搜索区,其位于目标可能位置区域内的部分为图4中的曲边多边形区域D1C1B2D2C4B3。该图形面积近似等于矩形B1B2B4B3的面积,事实上,矩形B1B2B4B3比有效搜索区D1C1B2D2C4B3多了两个面积相等的三角形oB1D1和A1D2B4,少了两个面积相等的扇形oC1B2和A1C4B3,鉴于三角形的面积和扇形的面积相差不大,将偏差忽略。
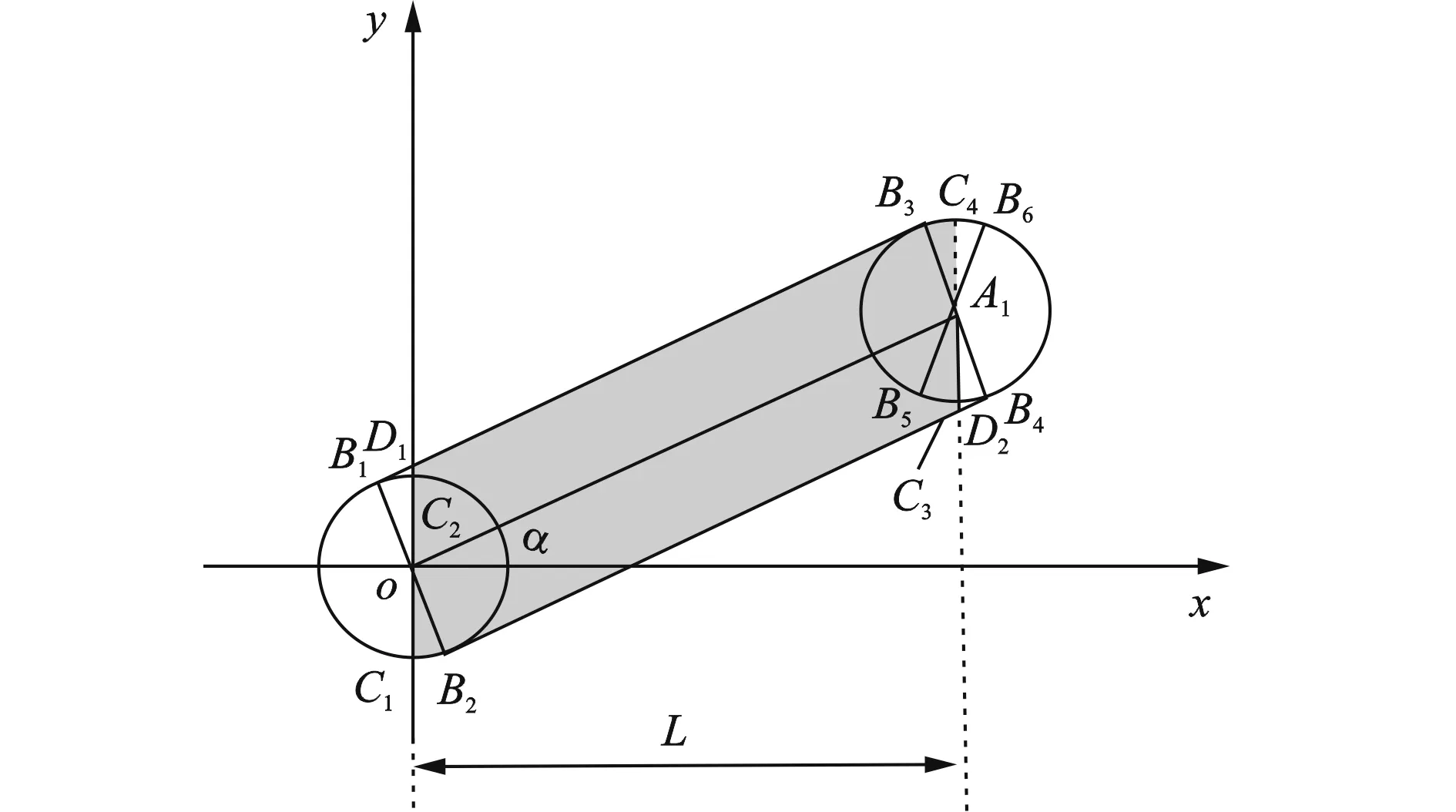
图4 单航段有效相对搜索区面积估算原理示意图
矩形B1B2B4B3的面积为直线段oA1的搜索区的矩形部分,即

(3)
综合以上分析可得,当m为整数时典型拦截搜索发现概率的解析计算公式为

(4)
整理得

(5)
这是一个经常被使用的拦截搜索发现概率计算公式[2]。该公式被用于进行多平台线式搜索发现概率估算和搜索方案优化决策[5]。
3 往返拦截搜索发现概率计算公式仿真检验和修正
因为编程原理简单、不易出错,仿真方法经常被用于计算效率要求不高情形下各种搜索行动的效能分析以及其他方法的正确性检验[1,3,6-8]。为检验式(5)计算结果的可靠性,编制计算机程序进行拦截搜索发现概率仿真计算对比。
(1)仿真检验
取目标速度18节(≈33.3 km/h),搜索舰船速度8节(≈14.8 km/h)、搜索线长度12海里(≈22.2 km)、对目标探测距离3海里(≈5.6 km)。取目标可能通过位置范围与舰船巡逻线覆盖位置范围一致,用式(5)计算得到的舰船发现目标的概率为0.547 2。取目标通过时间范围为0~72 h,样本容量10 000,仿真时间步长10 s,仿真结果为0.471 0,二者偏差较大,式(5)的计算结果偏大。
取目标速度8节(≈14.8 km/h),其他参数值保持不变,用式(5)计算得到的发现概率为0.707 1,而仿真结果为0.582 2,式(5)的计算结果还是偏大。
(2)计算公式修正
为找出式(5)计算结果偏大的原因,对图3中搜索者有效搜索区进行仔细观察发现,除了前面提及的计算单航段有效搜索区面积所用矩形面积实际上比搜索者单航段有效搜索面积略大外,搜索者相邻两个单程搜索区之间还有重叠,进行多阶段搜索有效搜索区面积计算时,没有将重叠部分的面积减去。考虑这两点,对单航程有效搜索区面积计算公式进行以下两项修正:


最后得到,一个巡逻单程搜索舰船的有效搜索面积实际为

(6)
目标可能位置区域不变,故拦截搜索发现概率应该为

(7)
针对前述的计算情形1,使用式(7)得到的发现概率计算结果为0.472 3,与仿真结果相吻合。针对计算情形2,使用式(7)得到的发现概率计算结果0.582 2,与仿真结果同样吻合。
取目标速度18节(≈33.3 km/h),搜索者搜索速度8节(≈14.8 km/h)、对目标探测距离3海里(≈5.6 km)、巡逻线长度范围10~20海里(≈18.52~37.04 km),使用式(5)、式(7)以及仿真分别计算得到不同巡逻线长度时搜索者发现目标的概率值,并将计算结果绘制成曲线,如图5所示。图5中,横坐标为巡逻线长度,单位海里(1海里≈1.852 km),纵坐标为搜索者发现目标的概率,取值较大的红色光滑曲线为式(5)的计算结果,值较小的绿色光滑曲线为式(7)的计算结果,值较小的蓝色非光滑曲线为仿真法所得结果。由图5可以看出,修正后的式(7)计算结果与仿真结果吻合,说明其是正确的。

图5 不同方法计算所得发现概率曲线比较图
4 计算公式及研究思路的适应性分析
式(7)是假设目标速度和航向确定情况下的往返拦截搜索发现概率计算公式。实际的作战行动决策过程中,会遇到目标速度和目标航向同样具有不确定性以及平台搜索样式更加灵活的情形,能否将该公式用于这些情况下的发现概率估算,或者是否可将该公式的研究方法推广应用于这些情形下的发现概率计算公式推导呢?为回答这个问题,进行计算公式对目标信息不确定性的适应性和研究思路对拦截搜索样式变化适应性的分析。
(1)计算公式对目标信息不确定性的适应性分析
假设除了目标通过位置和通过时间的不确定性外,目标速度和航向也是不能完全确定的[9-10]。将目标速度和目标航向均描述为随机变量,使用仿真确定搜索行动发现概率,与使用式(7)计算所得结果进行比较。
取巡逻线长度10海里(≈18.52 km),其他参数同前,假设目标速度和航向均服从均匀分布,取不同的目标速度分布均方差和目标航向分布均方差,得到的发现概率计算偏差随目标速度散布均方差变化曲线如图6所示,发现概率计算偏差随目标航向散布均方差变化曲线如图7所示。
由图6和图7可以看出,当目标速度均方差和目标航向散布均方差较小时,计算结果偏差较小,故一定情况下仍可使用式(7)进行发现概率计算。
比较图6和图7还可发现,对比计算偏差随目标速度均方差的变化,计算偏差随目标航向均方差的变化率更大,且偏差值为正值,即目标航向不确定情形下式(7)的计算结果偏大,分析其原因,是因为部分样本对应的目标0时刻位置超出理论分析所使用的目标可能位置区域,理论计算所使用的目标可能位置区域小于实际的目标位置区域,因此所得概率值偏大。

图6 发现概率计算偏差随目标速度散布均方差变化曲线

图7 发现概率计算偏差随目标航向散布均方差变化曲线
(2)研究思路对拦截搜索样式变化的适应性
为满足战法设计灵活性的需要,需要给出任意样式的拦截搜索发现概率计算的方法,以及更多情形下的多实体协同搜索效能分析方法[11-13]。若使用本文所用“基于有效相对搜索区分析” 的方法进行任意样式的拦截搜索发现概率计算,需要进行数量较多且相互关系多样的单航段搜索区合并图形面积的计算。
由本文对单舰船往返拦截搜索发现概率公式的推导和修正过程可以看出,由于涉及不同航段搜索区合并图形面积的计算,即便是对单舰船的非常简单的搜索样式,拦截搜索效能计算公式的推导也是比较困难且极易出错的。相比往返搜索,其他样式搜索的搜索区更为复杂,而多舰船联合搜索时,包含的不同直线航段数更多,形成的联合搜索区更难以直接给出面积计算公式。
要实现对任意样式拦截搜索发现概率的高效计算,需要研究专门的联合搜索区面积计算算法或设法提高仿真方法的计算效率。任意样式拦截搜索发现概率计算方法研究是下一步的一项重点工作。
5 结论
拦截搜索是反潜战中重要的搜索样式,本文使用“基于有效相对搜索区分析” 的方法对常用的单舰船往返拦截搜索发现概率计算公式进行了理论推导和仿真检验,并根据检验结果和进一步的理论分析对其进行修正,得到更为精确的计算公式,为任意样式拦截搜索发现概率计算公式推导和算法设计提供了思路。根据战场实际,除了典型拦截搜索行动效能计算外,还需要研究目标航向和速度不是确定值情形下的发现概率计算,这是下一步工作的另一个重点。
