改进型偏差耦合结构的多电机同步控制系统
2022-01-12梁定军
梁定军
广东美的白色家电技术创新中心有限公司,中国·广东 佛山 528311
1 引言
在当前工业生产体系之中,电机控制系统占据重要地位,其实际性能直接对生产效率以及产品质量造成影响,因此工业体系对电机控制系统提出极高的要求。近年来,随着社会经济发展速度不断提升,以往单电机作业模式已经难以满足生产实际需求,尤其是在冶金、数控机床等产业中。为满足生产过程中对精准度的要求,生产者需要利用多电机同步运转达成相应目标,这就使得控制系统的性能成为重中之重。因此,当前研究者已经将多电机同步控制系统作为当前主要研究课题。
2 改进型偏差耦合控制系统设计
研究人员在经过深入研究后发现,将不同电机相对速度信号融入其足比系数关系速度反馈信号之中,随后根据独立电机的工作状态,实现对各电机之间的速度补偿信号进行动态分配,即可达成较好的同步性能,此即为偏差耦合控制。已有研究成果中,偏差耦合控制系统仅能实现对多电机进行完全同步控制,比例同步控制上难以实现。由此,有技术人员在综合传统偏差耦合控制的基础上,对其进行一定程度的优化,形成改进型偏差耦合控制系统,并实现了多比例同步控制。以三台电机为例,其结构如图1所示。
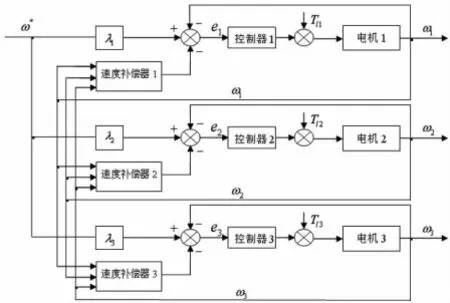
图1 改进型偏差耦合控制结构示意图
依据图1中所示信息可知,速度补偿器是此系统的核心关键部分,其实际运行过程承担着为每台电机提供速度补偿信号的功能。其中,λ1、λ2、λ3表示同步比例系数,当λi(1,2,3)均取值为1的情况下,即可视为完全同步[1]。
若要求各电机在实际运转过程中依照比例进行同步运转,依据图1所示结构,三台电机之间的转速关系如下所示:

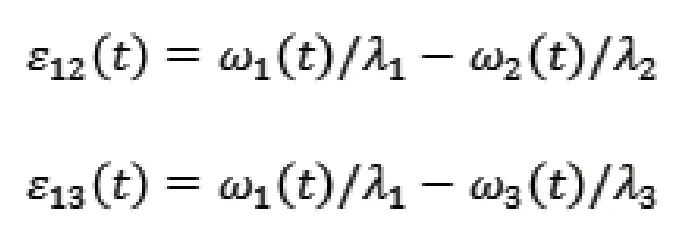
为确保各电机运行过程中呈现出同步运行状态,要求第一台电机及其他电机之间的跟随误差稳定收敛,即满足以下公式:

3 基于模糊PID的控制系统
现阶段,正在应用中的控制系统在实际运作过程中会根据设备运转过程中产生的误差以及变化率进行相应的数据调整。然而需要认识到的一点是,固定增益在实际应用过程中进涵盖点击转动惯量,这就是在负载变化幅度较大的情况下,会出现相应误差。在三台电机中,任意一台电机运转过程中产生的速度波动均可视为对其他电机的干扰,由此可以得出的结论是误差始终处于动态变化之中。因此,研究者采用模糊PID控制器取代固定增益,一旦电机运行过程中出现波动,该部件机会产生相应作用,高效准确地降低不同电机之间的跟随误差,进而确保其趋向稳定状态。模糊PID补偿结构如图2所示。
根据图2所示加入模糊PID改进速度补偿器模块结构原理图以及模糊PID控制系统,利用模糊PID模块替换原有速度增益模块,并形成新型速度补偿器,随后分别设置完全同步以及比例同步条件对电机同步运转情况进行仿真检验,对仿真结果进行检验可得出以下结果:受反应过程较为迟缓情况影响,仿真实验为确保调试便捷性,实际设定为0.3s。仿真检验开始后,三台电机均为空载启动,运行到0.2s时,给第一台电机加入负载为,同步比例系数λ1、λ2、λ3取值分别为1、0.5、0.25,进而得到每两台电机之间的转速差曲线。在仿真检验过程中,研究者分别选取第一台以及第二台电机,第二台以及第三台电机之间的转速差作为仿真对象,对其融入模糊PID控制系统后的成效进行分析研究。图3为加入以及未加入模糊PID控制系统的电动机的完全同步仿真转速差曲线图[2]。
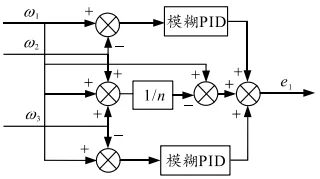
图2 加入模糊PID改进速度补偿器模块结构示意图

图3 两电机转速差示意图
在完全同步控制的情况下,由图3中信息可知,在完全同步的条件下,第一台电机加入负载时,第一与第二台电机之间的转速差约为6.5r/min,相较于未加入模糊PID控制器的情况下转速相差值为27r/min,具备较好的成效。同时,在电机加入负载0.25s后,振荡幅度已经无限趋于0,基本已经达到理想成效。由此,加入PID模糊控制器后形成的改进型偏差耦合控制策略更具优越性,同步更加精准,且抗干扰性能更强。
在比例同步控制倾向下。加入模糊PID的改进型控制系统中,当第一台电机加入负载时,第一台与第二台之间转速差的波动峰值为10r/min,并且没有出现明显振荡,一直趋于0,转速误差很小,达到了理想的效果。证明加入模糊PID的改进型系统比未加入模糊PID的系统具有更好的同步特性和抗干扰能力。具体如图4所示。

图4 比例同步条件下电机转速差
4 结语
综上所述,改进型偏差耦合控制系统是当前学界内研究的重点话题,其实际作用以及意义不言而喻。论文在研究过程中先对改进型偏差耦合控制系统结构进行深入研究。同时,针对在原有速度控制的基础上进行改进的控制策略。论文研究中通过将模糊PID控制系统与偏差耦合控制系统相结合形成一种新型的控制策略,并通过仿真实验,分别在完全同步控制以及比例同步控制的条件下对论文传统偏差耦合控制策略以及加入模糊PID控制系统的策略进行对比。最终仿真检验结果显示电机之间的转速差变化基本稳定在0的状态,在一定程度上改善了系统的同步性和抗干扰性。由此,论文所研究的基于模糊PID改进型偏差耦合结构为有效、可靠的多电机控制方案,具有较高的实际应用价值[3]。