沙漠光伏电池板清洗机器人的路径规划研究和设计
2022-01-12刘雪燕
刘雪燕
银川科技学院,宁夏 银川 750000
0 引言
目前,绝大多数光伏板长期露天放置使用,在中国西北部的一些地区,光伏板被放置在沙漠中。中国西部一些地区拥有固有地理特性,如人口较少、白天日照长、平均海拔较高。基于这些特性,当前很多大型光伏电池板在西部这些地区投建,光伏电站的太阳能电池板数量可能高达数万甚至数十万。对于这些工作在复杂环境中的光伏板,其表面很容易被灰尘或杂质覆盖。特别是西部地区干旱少雨,太阳能光伏板的清洁将面临重大考验[1]。即使水资源充足,全面的手动清洁也需要大量设备和劳动力。而且,人工清洗无法及时应对气候变化造成的大规模光伏板污染,不仅成本高,而且危险、低效。工人在清洁过程中施加的不均匀力会导致光伏板损坏,从而无法保证其发电效率。经过长时间的探索和现场研究可知,有必要为太阳能光伏发电部件开发一款专业清洗机器人,使其在西部地区进行太阳能电池板清洗工作,并具有良好的实用性[2]。科研人员基于机器人数学模型不断改进和创新,改善了机器人路径规划问题[3]。
1 路径规划研究和设计的方法
根据神经网络结构能量传递函数的路径规划算法和建模可知,在已知环境或者障碍物情况下进行路径的整体规划,可以从出发点到目的点寻找一条避让障碍物的最理想的路径。神经网络结构能量函数的路径规划的主要作用是改善环境约束和计算能量传递函数[4]。将避让障碍物路径上能量传递函数和总距离函数之和视为目标最优函数,再通过人工势场法和模拟退火算法及建模得出最后的极限值,确立路径运动过程的函数方程,最终让设定路径规划趋于最优路径。最优路径通常被视为从起点到终点为直线路径,在路径上均匀分布无数的点集。最优路径的能量传递函数是这条直线路径点集的传递函数[5]。这条直线路径的点集总是向着障碍物最少的一个方向移动,可以得到一条碰撞障碍物最少的路径。模拟退火算法是基于采用抽样算法,再采用AP聚类算法调整,可以快速找到问题的最优解,避免陷入区域极限值。路径能量函数由路径长度平方和路径罚函数两部分能量组成,由模拟退火算法求最小解,使其朝着尽量远离障碍物且使路径较短的位置移动。
2 路径规划模型建立与验证
2.1 BP神经网络算法及建模
采用BP神经网络的方法建模,BP神经网络分为输入层、输出层和隐含层。神经网络结构图如图1所示。
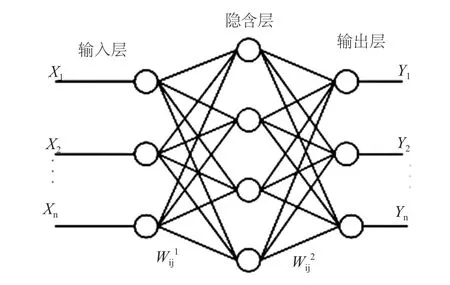
图1 神经网络结构图
初始化参数:初始化输入层到隐含层的权值Wij1和隐含层到输出层之间的权值Wij2,令学习因子为η,隐含层神经元个数为q,设有N个m维的输入数据,N个n维的期望输出作为神经网络的学习训练数据,迭代次数为s。
经过与隐含层之间的神经元j后输入隐含层输入和输出分别为

式中:f为隐含层的激活函数。
输入层的输入经隐含层到输出层之间的神经元k变为

输出层输入经输出层线性激活函数的输出为

输入样本中的m个样本都经过上述正向信息传播过程,输出m个实际输出。
误差反向传播过程如下:
输入样本对应的期望输出、实际输出误差、整个样本误差分别为

对权值进行相应的调整,则权值增量如下:


由上述推导可得,BP神经网络的权值迭代公式为实际应用时,通过上述过程不断循环来调整实际输出,直至与期望输出的误差达到精度要求。
2.2 人工势场法算法及建模
利用人工势场法对机器人进行路径规划的算法及建模。
(1)人工势场模型建立。根据当前参数确定引力场和斥力场两个位置增益系数,障碍物影响距离以及机器人运动速度。此外,还需确立机器人的置入位置、路径障碍物集点的位置、最终路径目标点的位置,最后根据当前所处环境情况建立人工势场模型。
(2)根据引力场和斥力场两个位置增益系数进行计算得出合力角θ。
(3)计算规划路径下一步的位置如下:

(4)机器人移动至(xk+1,yk+1),机器人运行一步后步数为k+1,机器人的位置由(xk,yk)变成(xk+1,yk+1)。
(5)评估机器人是否已从机器人置入位置到达路径目标点位置。如果从机器人置入位置到达路径目标点位置,则机器人中断路径规划;如果机器人没有路径目标点位置,则回至初始参数及障碍物目标点步骤前再往后面程序继续执行。最后根据建模通过比较机器人所经过的路径和设定最长路径可以判断机器人所规划的是否是最优路径规划方案,期间如果机器人没有完成最优路径规划,则需重新调整势场的初始参数障碍物目标点。
2.3 模拟退火算法及建模
模拟退火算法基于抽样算法,再采用AP聚类算法调整当前两个解L和J的步骤。
第一步:令m=0时的当前解为L(0)=L,在J下进行之后各步。
第二步:按某一规定的方式根据当前解L(m)所处的状态S,产生一个近邻子集:

随机得到一个新的状态L′作为下一个当前解的候选解,其计算公式如下:
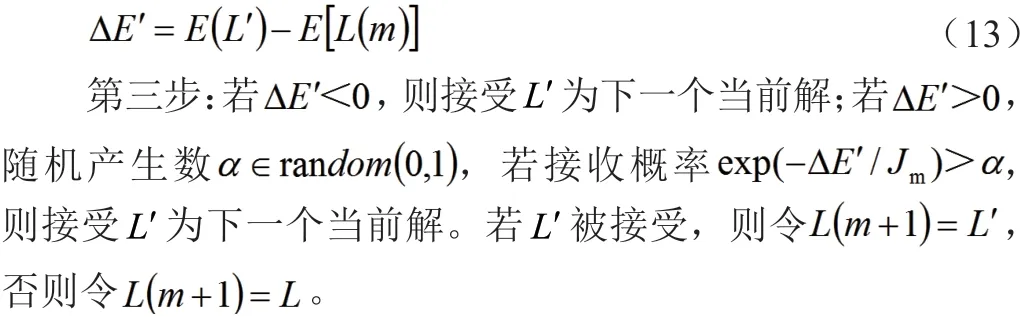
第四步:m=m+1,由某个给定的收敛准则检查算法是否应停止。若是则转向第五步;否则转向第二步。
第五步:将当前解L(m)返回调用其AP聚类算法。
3 总结
通过对3种模型建立和算法的对比分析,提出了沙漠光伏板清扫机器人的最佳路径规划方案为人工势场法。通过模糊理论可以使障碍物更加模糊、圆润,使最终目的地更加清晰。将模糊理论与人工势场技术相结合,建立一种模糊人工势场路径规划方法,可以有效让二者密切结合,改进了人工势场法的数学模型和快速让机器人置入位置到达路径目标点位置,同时能够满足机器人的路径设计动态规划。
