用阻力补偿法探究加速度与力、质量的关系的实验器材改进与创新
2022-01-12温敏
温 敏
(广东省开平市忠源纪念中学,广东 江门 529300)
1 教材参考案例:用阻力补偿法探究加速度与力、质量的关系
1.1 实验器材
小车、打点计时器、纸带、复写纸、一端带定滑轮的长木板、低压交流电源、细绳、木块、钩码、重物、导线、天平、夹子、刻度尺.
1.2 实验操作
(1)平衡阻力:如图1所示,取下钩码,将木板上安装打点计时器的一端慢慢垫高,轻推小车,直至纸带上打出的点距离基本相等,有Mgsinθ=f+mg.
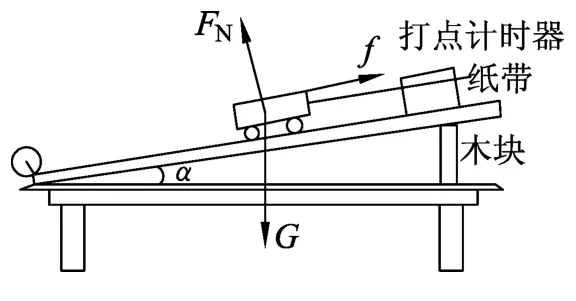
图1 平衡小车阻力示意图
(2)如图2所示,挂上钩码,将小车由静止释放,小车和钩码一起做匀加速直线运动,并打出纸带.小车运动时,有mg=(m+M)a,则小车受的拉力当M≫m时,有F≈mg,即拉力大小近似等于钩码的重力.
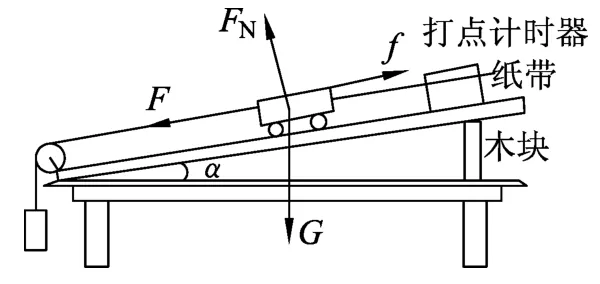
图2 小车加速运动受力示意图
(3)保持小车质量不变,通过改变钩码的个数可以成倍地改变小车所受的拉力,选择较理想的纸带,利用Δx=a T2及逐差法求a,作出a F的关系图,根据图像得出实验结论;保持小车受的拉力不变,通过增减小车中的重物改变小车的质量,选择较理想的纸带,利用Δx=a T2及逐差法求a,作出的关系图,根据图像得出实验结论,最后总结a与F、M的关系.
1.3 实验不足之处
(1)实验须平衡阻力.
(2)钩码的质量要远小于小车的质量,即m≪M.
2 实验器材改进与创新
下面的实验通过对阻力补偿法探究加速度与力、质量的关系的实验器材改进与创新,使实验原理得以改进与创新.
2.1 实验1:利用参考案例的实验器材改进与创新实验
2.1.1 实验器材
在参考案例的实验器材基础上,在长木板底部安装一块海绵(缓冲作用).
2.1.2 实验操作
(1)平衡系统:挂上钩码,将木板上安装滑轮的一端慢慢垫高,轻推小车,直至纸带上打出的点距离基本相等为止.小车受力如图3所示,有mgsinθ=f′+mg.
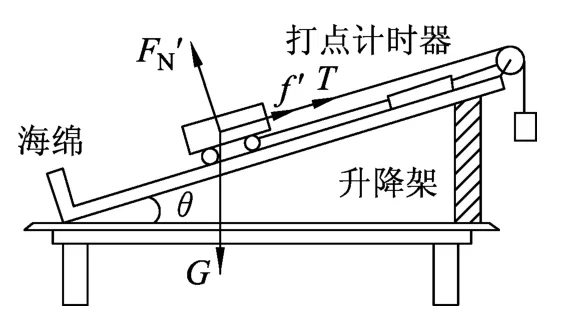
图3
(2)剪断细线,小车由静止开始沿着长木板向下做匀加速直线运动,并打出纸带.小车受力如图4所示,小车所受的拉力F=Mgsinθ-f′=f′+mg-f′=mg,则有F=mg,小车所受的拉力大小等于钩码的重力.
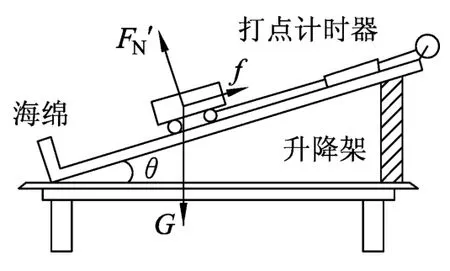
图4
2.1.3 实验改进与创新之处
实验时,钩码的质量无须远小于小车的质量,小车所受拉力的大小等于钩码的重力.
2.2 实验2:利用力传感器改进与创新实验
2.2.1 实验器材
在参考案例的实验器材基础上,增加一个力传感器.
2.2.2 实验操作
先取下细绳和钩码,把长木板左侧适当垫高,平衡阻力.如图5所示,挂上钩码,将小车由静止释放,小车在拉力F作用下做匀加速直线运动,拉力由力传感器读出,然后按参考案例的实验操作(3)进行操作,作出的关系图,总结a与F、M的关系.
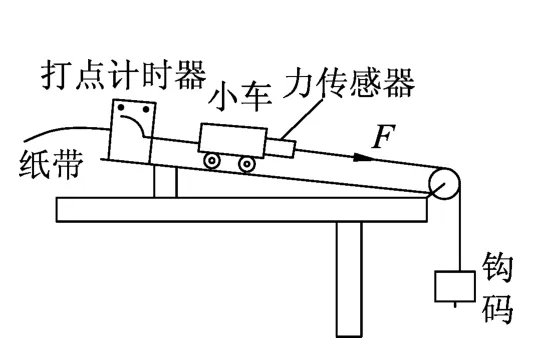
图5
2.2.3 实验改进与创新点之处
(1)小车所受的拉力由力传感器测量.
(2)钩码的质量无须远小于小车的质量,也无须测钩码的质量.
2.3 实验3:利用弹簧测力计改进与创新实验
2.3.1 实验器材
在参考案例的实验器材基础上,增加轻滑轮、弹簧测力计.
2.3.2 实验操作
先取下细绳,将长木板的左侧适当垫高,平衡阻力.如图6所示,挂上钩码,将小车由静止释放,小车在拉力F作用下做匀加速直线运动,拉力由弹簧测力计读出,然后按参考案例的实验操作(3)进行操作,作出的关系图,总结a与F、M的关系.

图6
2.3.3 实验改进与创新之处
(1)小车所受的拉力由弹簧测力计测量.为了更准确地测拉力,可用力传感器取代弹簧测力计.
(2)钩码的质量无须远小于小车的质量,也无须测钩码的质量.
2.4 实验4:利用光电门和弹簧测力计改进与创新实验
2.4.1 实验器材
小车、遮光片、光电门(2个)、游标卡尺、钩码、刻度尺、一端带定滑轮的木板、轻绳、轻滑轮、弹簧测力计、木块.
2.4.2 实验操作
取下细绳,将长木板的左侧适当垫高,平衡阻力.如图7所示,将小车由静止释放,小车在拉力F的作用下做匀加速直线运动,先后通过光电门A、B,用刻度尺测出A、B的距离为L,与光电门连接的数字计数器可以测量小车经过光电门A、B所用的时间分别为tA、tB.小车受的拉力由弹簧测力计读出,用游标卡尺测遮光片的宽度d,小车经过A、B时的速度分别为vA、vB,则有由得,然后按参考案例的实验操作(3)进行操作,作出的关系图,总结a与F、M的关系.
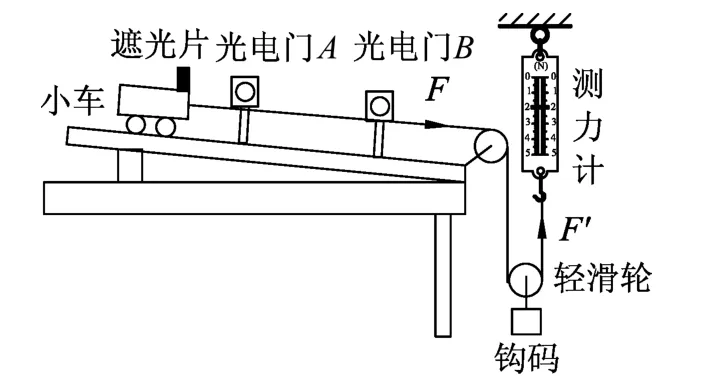
图7 应用光电门与测力计的实验装置
2.4.3 实验改进与创新之处
(1)改进了实验原理,用光电门代替打点计时器,遮光片结合光电门测得滑块的初、末速度,由运动学公式求出加速度.
(2)小车所受的拉力由弹簧测力计测量,为了更准确测拉力,可用力传感器取代弹簧测力计.
(3)钩码的质量无须远小于小车的质量,也无须测钩码的质量.
2.5 实验5:利用光电门、力传感器和气垫导轨改进与创新实验
2.5.1 实验器材
钩码、力传感器、带刻度尺的气垫导轨、光电门、遮光片、滑块、游标卡尺.
2.5.2 实验操作
将带遮光片的滑块由静止释放,小车在拉力F作用下做匀加速直线运动,与光电门连接的数字计数器可以测量小车经过光电门所用的时间t.如图8所示,小车受的拉力由力传感器测出,从刻度尺读出滑块的位移L,用游标卡尺测遮光片的宽度d,小车经过光电门时速度,由v2=2a L得即然后按参考案例的实验操作(3)进行操作,作出的关系图,总结a与F、M的关系.
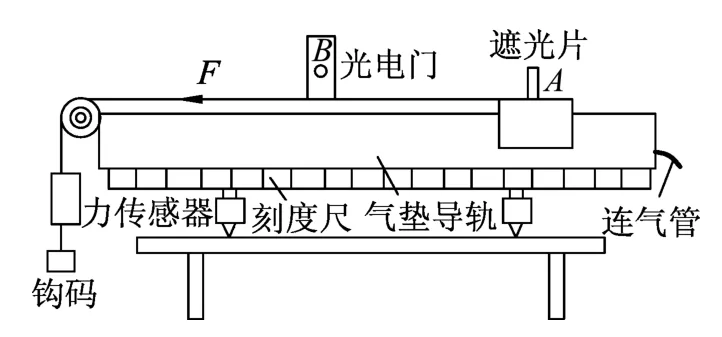
图8 应用光电门与气垫导轨的实验装置
2.5.3 实验改进与创新之处
(1)改进了实验原理,用光电门代替打点计时器,遮光片结合光电门测得滑块的末速度,在刻度尺上读出滑块运动的位移,用运动学公式求加速度.
(2)用气垫导轨代替长木板,无须平衡阻力.
(3)滑块受的拉力由力传感器测出.
(4)钩码的质量无须远小于滑块的质量,也无须测钩码的质量.
2.6 实验6:利用位移传感器和力传感器改进与创新实验
2.6.1 实验器材
小车、位移传感器、力传感器、钩码、一端带定滑轮的木板、轻绳、砝码、木块.
2.6.2 实验原理
取下轻绳,再将长木板的右侧适当垫高,平衡阻力.如图9所示,将位移接收器与计算机相连,开启位移传感器的发射器电源,将小车由静止释放,小车在拉力F作用下做匀加速直线运动,拉力由力传感器测出,位移传感器测出小车的运动时间为t、位移为L,根据得然后按参考案例的实验操作(3)进行操作,作出a-F、的关系图,总结a与F、M的关系.
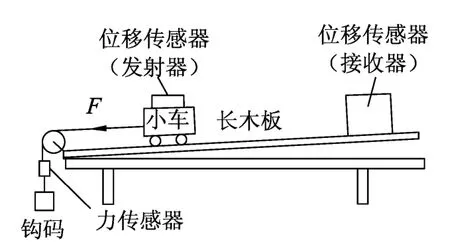
图9 应用位移传感器的实验装置
2.6.3 实验改进与创新之处
(1)改进了实验原理,用位移传感器代替打点计时器测出位移,用运动学公式求加速度.
(2)用力传感器测小车受的拉力.
(3)钩码的质量无须远小于小车的质量.
通过对用阻力补偿法探究加速度与力、质量的关系的实验器材改进与创新,在改进了实验原理的基础上也创新了实验原理,有效地提升了实验的质量与效果.
