毫米波雷达在小尺度云雾系统监测中的应用
2022-01-12岑炬辉唐世浩胡利军涂小萍姚日升
岑炬辉 唐世浩 胡利军,3 涂小萍 姚日升,3
(1 宁波市气象局,浙江 宁波 315012;2 国家卫星气象中心,北京 100081;3 浙江省气象网络信息中心,杭州 310017)
引 言
在水汽充足、微风及大气稳定的情况下,当相对湿度达到100%时,空气中的水汽便会凝结成细微水滴悬浮于空中,使近地面水平能见度下降,当能见度低于1 km时,称之为雾。雾天能见度恶化,妨碍海陆空交通运输,往往会导致交通事故,造成生命和财产损失。海雾严重影响航海及飞行安全,对交通安全影响巨大,常引起灾难性事故。我国近海以平流冷却雾最为常见,这种雾由暖湿空气在较冷的海面上流动,冷却凝结而成,但实际上雾的生成有多种原因。近年来沿海地区对海雾特征的研究[1-2]多是以自动气象观测站资料为基础展开的,由于海上观测站点稀少,使用传统方式在海雾的监测预报方面使用模式预报的准确性很低[3],面临着巨大的困难,因此需要引入新的观测技术。
毫米波雷达最早出现在1940s,早期功能有限,只能探测比较强的云[4]。1960s,美国空军用于监测机场附近的云,这一时期大量研究[5-6]显示这些非多普勒雷达能够有效探测云的边界,降水和湿度层。1980s,美国国家海洋大气局(NOAA)也在AN/TPQ-11系统的基础上发展出集多普勒和双极化功能于一体的改进型Ka波段毫米波侧毫米波雷达[7-8]。Hobbs,et al[9]将固态电子器件应用到了AN/TPQ-11系统中,并且增加了多普勒频移探测;1990s初,国际气候组织进一步确定了云在气候变化中的重大作用,而且毫米波雷达的优势也逐渐在探测中出来,随着在硬件系统中运用增加天线增益以及极化特性的技术,毫米波雷达正式成为遥感云的主要手段之一,发达国家开始对其重点发展[10-13]。
1979年,中国科学院大气物理研究所和安徽井冈山机械厂合作研发了X波段(3 cm)和Ka波段(8.2 mm)双波长雷达,并进行了天气雷达和毫米波雷达观测云降水结构的理论和观测对比,结果表明:即使在当时非常落后的器件条件下,毫米波雷达在探测近距离云细微结构等方面也优于天气雷达[14]。近年来,我国气象学家们越来越关注云在气候变化作用中的重要性,重点发展云观测技术以及毫米波气象雷达。2007年研发出具有多普勒和极化功能的8.6 mm毫米波雷达,并且于2008年5—9月成功进行了外场试验。数据分析表明,该雷达能够有效探测到层积云、高层云、台风外围深对流云等典型云系[15]。2013年研制了一台W波段双极化云雷达,并进行了云物理参数的初步反演[16]。
毫米波雷达在研究云的宏观微观特性方面已有较大进展[17-25],而运用毫米波雷达对小尺度天气系统进行研究属于新的研究方向。本文运用毫米波雷达结合地面观测站的方式,对2017年4月15日夜间至16日上午在宁波北部海域大范围的大雾天气过程进行了分析,揭示了毫米波雷达在低能见度天气中的应用前景。
1 资料介绍
1.1 毫米波云雾雷达
毫米波云雾雷达布设在宁波臻德环保科技有限公司(29.1°N、122.12°E),工作波段为Ka波段(33.44 GHz ±10 MHz),以固定天顶指向的时间高度显示(THI),平扫显示(PPI)和高扫显示(RHI)这3种探测显示方式对大气进行观测。利用雾滴、云滴、雨滴等液态水滴对电磁波的散射作用,对15 km径向范围内非降水云、雾和弱降水等进行观测,空间分辨率为30 m,可实时获取探测范围内雾、云、雨的位置分布、强度、速度、谱宽等相关信息。
1.2 能见度观测站
毫米波雷达探测区域共有7个能见度观测站。其中宁波区域3个,分别为大猫岛站(K2287)、凉帽山岛站(K2293)和白鹅山礁站(K2295),这3个站点都是能见度观测的专用站点;舟山地区4个,分别为定海(58547)、金鸡山社区(K9551)、南海学校站(K9623)和老鼠山屿站(K9625),这4个站点同时布设自动气象观测站,属于联合观测站点。
1.3 自动气象观测站
毫米波雷达探测区域共有12个自动气象观测站(简称自动站),其中9个站点有气温观测,7个站点有相对湿度观测。其中定海(58547)为国家一般站,按照《地面气象观测规范》的要求进行数据质量控制;其他11个无人值守常规中尺度站,主要通过采集系统的阈值限制以及特殊情况下的人工判别检验等方法进行数据质量控制。以上各类站点的地理位置和毫米波云雾雷达的扫描区域如图1所示,降水资料详见表1。

图1 毫米波雷达扫描区域及区域内能见度站、自动站地理位置分布Fig.1 Geographical distribution of the visibility station and automaticstation in millimeter-wave radar scanning region

表1 毫米波雷达及附近区域站点降水汇总(按时间先后排列)Table 1 Precipitation summary of the millimeter wave radarscanning area and nearby (Chronological order)
2 数据分析
2017年4月15日夜间至16日上午,在宁波东北部海域出现了大范围低能见度的天气过程,局地短时出现了能见度低于200 m的浓雾。毫米波云雾雷达对整个过程进行不间断观测并获取了有效资料。将云雾系统中出现的3种主要结构分别定义为液态水系统、游离液态水团和局地短时液态水团。液态水系统,指长宽范围在5~20 km,中心回波强度在15 dBZ以上的结构;游离液态水团,指长度在5 km以上,宽度在3 km以下,中心回波强度在-5~15 dBZ之间的结构;局地短时液态水团指长宽都在3 km以下,中心回波强度在0 dBZ以下,并且存在时间不超过15 min的结构。
2.1 毫米波雷达对大型液态水系统的监测
对2017年4月15日20时—16日10时(北京时,下同)有4个大范围强回波系统(即液态水系统,按过境时间分别以1、2、3、4进行区分)。图1中长箭矢和数字小标给出了4个液态水系统中心位置经过雷达扫描区域时的路径,和系统的大概宽度和过境时间,这些液态水系统平均尺度在10 km左右,通过雷达扫描区域的时间约为50 min。
图2为液态水系统1经过毫米波雷达扫描区域时的雷达扫描图像。23时07分(图2a)液态水系统的一部分已经进入毫米波雷达扫描区域,此时能见度站大猫岛、凉帽山岛已经被液态水系统所覆盖。图3给出了大猫岛雷达反射率为-20 dBZ(23时08分,同一时间的雷达反射率只标注一次扫描时间,下同),凉帽山岛雷达反射率为-10 dBZ,同时大猫岛、凉帽山岛和其附近的白鹅山礁能见度都在快速下降。23时17分(图2b),大猫岛、凉帽山岛和白鹅山礁的雷达反射率都在10 dBZ左右(23时17分),凉帽山岛和白鹅山礁的能见度降到了2 km以下,大猫岛的能见度在3 km左右,并且还在下降中,在后部游离液态水团覆盖时(23时34分,-30 dBZ)降到了1 km以下。23时21分(图2c)液态水系统1的覆盖范围扩大,但是由于新扩大区域内没有观测站点,因而观测结果与上一个时次相比变化不大。之后液态水系统继续往东北偏东方向移动,在23时37分处于图2g位置,此时液态水系统已经远离南部3个站点,东北部南海学校和金鸡山社区则被液态水系统覆盖(图3实心圆),出现了5 dBZ(23时43分)左右的雷达反射率,能见度快速下降,临近的老鼠山屿能见度也在快速下降。23时45分(图2h)液态水系统1即将完全离开扫描区域,南海学校和金鸡山社区的雷达反射率在-20 dBZ左右,这两站和老鼠山屿的能见度已降至500 m以下。由图3可见,随着液态水系统的影响结束,站点能见度会在较短时间内恢复。综上,除了离液态水系统较远的定海之外,液态水系统过境前后使得6个站点能见度都产生了深V字型变化。

图2 2017年4月15日液态水系统1雷达图:(a)23∶07—23∶13 PPI图;(b)23∶13—23∶18 PPI图;(c)23∶13—23∶24 PPI图;(d)23∶24—23∶26 RHI图;(e)23∶28—23∶29 RHI图;(f)23∶32—23∶33 THI图;(g)23∶33—23∶38 PPI图;(h)23∶44—23∶50 PPI图Fig.2 Millimeter wave radar scan map of system 1: (a)PPI at 23∶07 BST—23∶13 BST; (b)PPI 23∶13 BST—23∶18 BST;(c)PPI 23∶13 BST—23∶24 BST;(d)PPI 23∶24 BST—23∶26 BST;(e)PPI 23∶28 BST—23∶29 BST;(f)PPI 23∶32 BST—23∶33 BST;(g)PPI 23∶33 BST—23∶38 BST;(h)PPI 23∶44 BST—23∶50 BST
16日03时,液态水系统2是从西南方向进入,随后往偏东方向移动,依次经过凉帽山岛、大猫岛、白鹅山礁和老鼠山屿,未经过北部的定海、南海学校和金鸡山社区。由图3可见,随着液态水系统的过境,凉帽山岛先是出现-15 dBZ(03时16分)雷达反射率,之后降为-20 dBZ(03时25分),再降到-25 dBZ(03时27分),之后上升到10 dBZ(03时36分),再降到0 dBZ(03时39分),能见度在-25 dBZ时已经从3 000 m降到了500 m以下,之后略有回升,但是在其后在液态水系统中心区域的影响下(10、0 dBZ的强回波)再次迅速下降到了200 m以下;大猫岛雷达反射率先是在03时16分出现-10 dBZ雷达反射率,之后从-20 dBZ(03时27分)上升到10 dBZ,再降到0 dBZ,能见度在雷达出现-10 dBZ反射率的时候降到了200 m以下,其后虽然有强回波,但是能见度却处于快速上升中;白鹅山礁雷达反射率则是从-10 dBZ(03时27分)下降到-20 dBZ,再升到-15 dBZ,能见度在出现-10 dBZ 回波前已经从3 000 m降到了500以下,之后在液态水系统的影响下下降到了200 m以下;虽然从液态水系统前后位置推测得出老鼠山屿会被液态水系统覆盖,但是此时雷达在用其他模式观测,因而没有雷达反射率值,其能见度从2 000 m下降到300 m左右然后回升。液态水系统2过境的4个站点能见度前后变化也呈现了快速下降之后再快速回升的深V型变化,更由于液态水系统2中心区域较小,覆盖时间较长,使得部分站点能见度出现了降到了200 m以下的二次下降现象。

图3 2017年4月15日20时至16日10时各站能见度和雷达反射率(其中曲线为能见度;○为雷达反射率,其中●为液态水系统覆盖,◎为游离液态水团,⊙为局地液态水团;虚线、实线分别表示液态水系统进入、离开;底部蓝色柱状为相应区域内降水)Fig.3 Time-variation of radar reflectivity and visibility at visibilitystations from 20∶00 BST 15 to 10∶00 BST 16 April 2017(Curve: visibility;circle: radar reflectivity; the dotted vertical lineand the solid vertical line represent the system entering and leaving;blue column at bottom for precipitation in corresponding area)
液态水系统3是此次过程中唯一的过境了全部7个站点的系统。随其进入并向东北方向移动,凉帽山岛雷达反射率从-5 dBZ(05时27分)上升到0 dBZ(05时29分),再降到-10 dBZ(05时43分),能见度从1 000 m以上降到了500 m左右;白鹅山礁雷达反射率从-10 dBZ上升到15 dBZ,随着回波的增强,能见度从2 000 m左右降到了1 000 m左右;大猫岛雷达反射率从-10 dBZ上升到5 dBZ,再降到0 dBZ,能见度未见明显变化。随后液态水系统往东北方向移动,首先覆盖老鼠山屿,雷达反射率从-20 dBZ(05时43分)上升到0 dBZ(05时52分),之后维持在0 dBZ(05时55分),能见度从2 000 m以上降到了500 m以下;随后覆盖定海,雷达反射率从5 dBZ(05时52分)上升到10 dBZ(05时55分),后降到-20 dBZ(05时55分),能见度稍有下降;之后经过南海学校,雷达反射率从-25 dBZ(05时55分)上升到-20 dBZ(06时04分),之后又升到-10 dBZ(06时06分),能见度略上升;金鸡山社区是在液态水系统即将离开时才覆盖到,只有一次观测,雷达反射率为-10 dBZ(06时06分),能见度略上升。在液态水系统3过境前后,凉帽山岛、白鹅山礁和老鼠山屿这3个站点的能见度有深V变化,大猫岛无明显变化。
液态水系统4(图略)在系统3离开约半个小时进入雷达扫描区,由于其路径向东,因而只有大猫岛、凉帽山岛、白鹅山礁有液态水系统过境。液态水系统首先覆盖凉帽山岛,雷达反射率为-30 dBZ(06时57分),随后覆盖3个站点(07时06分),其中大猫岛雷达反射率为-15 dBZ,凉帽山岛雷达反射率为-25 dBZ,白鹅山礁雷达反射率为-10 dBZ。其间凉帽山岛和白鹅山礁的能见度均降到了500 m以下,但是大猫岛的只是稍微下降。在液态水系统4过境前后凉帽山岛和白鹅山礁的能见度出现了深V型变化。
另外,在液态水系统1经过毫米波雷达扫描区域时,定海站在距离液态水团大概3 000 m时,能见度从1 800 m左右降到了1 300 m左右。而在液态水系统2经过毫米波雷达扫描区域时,南海学校和金鸡山社区在距离液态水系统5 000 m时,南海学校能见度从400 m左右降到了150 m左右,金鸡山社区能见度从500 m左右降到了200 m以下。在液态水系统4经过毫米波雷达扫描区域时,距离液态水系统较近的老鼠山屿在距离其4 000 m左右距离时,能见度从2 000 m降到了500 m。可见,除了经过所有站点的液态水系统3经过时难以分辨,其余都出现了在液态水系统靠近(3~5 000 m)而无需覆盖就出现能见度下降的情况。
从整个过程来看,液态水系统过境会使大部分站点的能见度呈现深V型变化。在以上4个液态水系统中,除去受其他因素的站点(以降水为主),毫米波雷达回波的出现预示着能见度开始降低,反射率最大值与能见度谷值相对应。因此下一步工作将应用雷达的观测结果来估测整个区域的能见度分布状况,并根据液态水系统的移动变化来对能见度变化趋势进行预测。在液态水系统靠近时站点就会受到影响,有时在液态水系统覆盖前就会对能见度产生很大影响。通过对THI图(图2f)的分析可以得到,这些液态水系统整体都是向下的垂直速度,结合RHI图(图2d、e)所获取的液态水系统垂直剖面,可以得到,整个液态水系统实际上是从高云中降落而来,这次低能见度天气实际上是来自于高云的“降雾”。
2.2 毫米波雷达对液态水系统外围游离液态水团的监测
在此次过程中,液态水系统周围常常伴随着一个或几个尺度在千米左右游离液态水团,这些液态水团的出现对能见度也会产生不小影响。
在液态水系统1移到东北部的时候,其后部的游离液态水团覆盖了大猫岛(-30 dBZ,23时34分),使大猫岛能见度迅速降到了1 000 m以下,附近的凉帽山岛在同一时间也出现了能见度的下降。
在16日02时前后,雷达观测到液态水系统2外围的带状结构开始进入雷达扫描区域(图4a、b)。从图3上可以看到,这个带状结构的过境,大猫岛和凉帽山岛都有弱回波(3次,都在-10 dBZ以下)出现。大猫岛的能见度从1 000 m以上波动下降至200 m左右,之后在液态水系统2作用下降到200 m以下;凉帽山岛从5 000 m以上降到了1 000 m以下,之后回升,到液态水系统而影响时再次下降。在这些带状结构出现时,可以看到白鹅山礁、老鼠山屿、南海学校和定海虽然未被其所覆盖,但是能见度都出现了显著的起伏变化。

图4 游离液态水团雷达扫描(a、b)和局地短时液态水团雷达扫描(c、d):(a)02时43分;(b)02时49分;(c)06时31分;(d)06时36分Fig.4 (a,b)Radar image of free liquid water masses and (c,d) radar image of local short-time liquid water massesat: (a)02∶43 BST; (b)02∶49 BST; (c)06∶31 BST; (d)06∶36 BST
在05时左右,液态水系统3前端游离的小液态水团开始出现。凉帽山岛在04时52分(-30 dBZ)和05时06分(-20 dBZ)两次被覆盖,大猫岛在05时07分被覆盖(-15 dBZ),定海在05时09分开始的连续四次扫描中都被覆盖(-15 dBZ),南海学校在05时22分开始的连续两次扫描中也被覆盖(-20 dBZ)。随着其移动凉帽山岛和南海学校出现了能见度下降,但是定海和大猫岛未出现能见度下降。而在液态水系统到了北部之后,其后部的游离液态水团在06时04分又覆盖了大猫岛(-25 dBZ)和凉帽山岛(-30 dBZ),但是并未造成能见度的明显下降。
在液态水系统4即将离开雷达扫描区域时,其后部的游离液态水团在07时24分也覆盖了南海学校(-10 dBZ)和金鸡山社区(-15 dBZ),但是也未造成能见度的下降。
综上,通过毫米波雷达对游离液态水团的观测,除去受其他因素(以降水为主)影响的站点,得出其对能见度也有很强的影响,是造成无液态水系统过境时能见度急剧变化的主要原因之一。
2.3 对局地短时液态水团的监测
除了液态水系统和游离液态水团之外,偶尔在某些区域会突然出现弱回波,又很快消失(图4c、d)。在这次过程中大猫岛总计出现了3次,分别为00时11分(-25 dBZ)、00时48分(-25 dBZ)和04时30分(-25 dBZ)。凉帽山岛出现了2次,分别为04时30分(-20 dBZ)和06时32分(-30 dBZ)。其中大猫岛第一次和第三次,凉帽山岛第二次伴随着能见度的降低;大猫岛第二次,凉帽山岛第一次伴随着能见到度的上升。局地短时液态水团的形成与局地其他因素关系紧密,不能单以雷达反射率来进行分析。
另外白鹅山礁和老鼠山屿整个过程中间或探测到弱回波,表明这两个站点在不断有液态水生成,局地水汽条件极好。
2.4 气象要素变化
16日00时前后,7个站都出现了能见度的快速下降,大猫岛和老鼠山屿降到了500 m以下,定海、金鸡山社区降到了1 000 m以下,凉帽山岛、白鹅山礁降到了1 000 m左右,南海学校不如其他站点明显,但也有这一变化。此时并无系统性雷达回波,只有大猫岛和老鼠山屿分别出现了-25 dBZ(00时11分)和-30 dBZ(00时20分)的弱回波,这应该是两个站点能见度降得比其他站点低的原因。此时,图5表明各个站点的相对湿度都已饱和,而温度还在持续下降,因此在近地面产生了水汽凝结,造成了能见度的快速下降。通过对自动站降水资料(表1、图3)表明,首次出现降水就在这个时间附近,其中大榭南和大榭北降水量均为0.1 mm,万向东侧的小干岛(K9614)在23时44分和23时46分分别降水0.1 mm。随后能见度随之又快速上升,其中白鹅山礁、凉帽山岛、老鼠山屿、定海等站上升到了5 000 m以上,其余站点也都会升到了2 000 m以上。
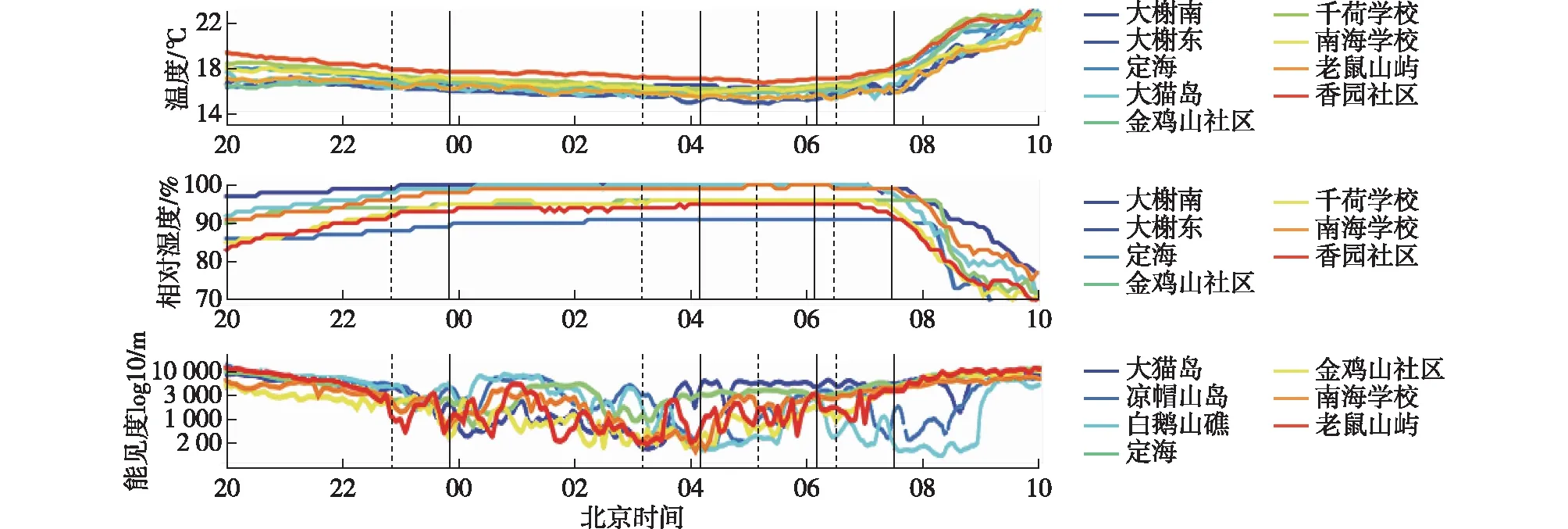
图5 2017年4月15日20时至4月16日10时毫米波雷达扫描区域内各自动站温度、相对湿度随时间的变化Fig.5 Time-variation of temperature and relative humidity of each automatic station in the millimeter waveradar scanning area during 20∶00 BST on 15 to 10∶00 BST on 16, April 2017
液态水系统2过境之后(04时10分)有6个站能见度又出现了下,说明在前面分析的南部3个站点液态水系统2持续影响之外,还有其他影响范围更广的影响因素。此外在这个时间附近各个站点的风速都出现了明显的减小,这一现象对这里的能见度下降应该起了相当重要的作用。随后除了白鹅山礁之外的其他站点都快速恢复,而白鹅山礁的能见度长时间维持在500 m以下,应该是和局地的因素有关。
由表1可见,在液态水系统3经过大榭二桥时有降水产生(05时08分,0.1 mm);在液态水系统经过定海时,也有降水产生(06时00分,0.1 mm)。因此推断,大榭二桥降水导致了液态水系统近地面液态水的大量减少,从而使后面液态水系统经过大猫岛站点时能见度无明显变化;定海降水导致定海、南海学校和金鸡山社区附近区域液态水系统近地面液态水的大量减少,使得这3个站点在液态水系统过境时能见度反而有所上升。
在液态水系统4过境时,大榭二桥出现了两次连续降水。这样大量的液态水使得白鹅山礁能见度降低到200 m左右,由于白鹅山礁本身的水汽条件,200 m以下能见度天气得以长时间维持(凉帽山岛的能见度下降到500 m以下之后又很快上升了,这样的变化正是液态水系统过境时正常的变化状态)。定海站附近的白泉公园在06时46分降水0.1 mm,北部4个站点能见度从那时开始上升,也与从那时开始的相对湿度下降,温度上升(图5)变化趋势一致。
大猫岛在液态水系统2中心经过时能见度处于快速上升状态(图3),并在其后一段时间持续上升,一直到了5 000 m以上,与其他站点的变化完全相反。且气象要素资料不全,为异常值,不予考虑。
综上,低能见度天气除了受液态水系统影响之外,还受温度、相对湿度、风速、降水等气象要素的影响。表2对整个时段中,造成能见度变化的各项因素产生作用的次数进行了统计,总计与毫米波雷达反射率相关的为30次,占比39.5%,受气象要素影响的为33次,占比43.4%,受其他未知因素影响的为13次,占比17.1%。毫米波雷达反射率相关的能见度变化次数接近40%,大致与气象要素影响导致的能见度变化次数相当,将未确定因素导致的能见度变化次数降低到了20%以下。与布设毫米波雷达之前相比,对此次低能见度系统的观测效果提高了接近一倍。

表2 造成各能见度站点能见度变化的因素统计Table 2 Statistics of the factors that cause the change of visibility at each visibility station
3 结论
运用毫米波雷达结合地面观测站的方式,对2017年4月15日夜间至16日上午在宁波北部海域大范围的大雾天气过程进行分析。主要结论如下:
(1) 毫米波雷达可以实现对10 km左右的液态水系统、千米左右游离液态水团和更小尺度的局地短时液态水团等的有效监测。
(2) 液态水系统过境使站点的能见度呈现深V型变化,未被液态水系统过境的站点,在靠近液态水系统时也会出现能见度变化。
(3) 游离液态水团对能见度也有很强的影响,是造成无液态水系统过境时能见度急剧变化的主要原因之一。
(4) 局地短时液态水团的形成与局地其他因素关系紧密,不能单以雷达反射率来进行分析。
(5) 能见度的变化主要受毫米波雷达反射率相关因素和气象要素两者影响,毫米波雷达的应用将未确定因素导致的能见度变化次数降低到了20%以下。
