北斗三号星座拟稳钟差测定及其预报
2022-01-11杨宇飞杨元喜陈金平唐成盼郭海荣杨建华刘金获
杨宇飞,杨元喜,陈金平,唐成盼,李 冲,郭海荣,杨建华,刘金获,杨 斌
1. 北京卫星导航中心,北京 100094; 2. 地理信息工程国家重点实验室,陕西 西安 710054; 3. 西安测绘研究所,陕西 西安 710054; 4. 中国科学院上海天文台,上海 200030
星载原子钟的稳定性和钟差算法决定了导航卫星钟差的精度[1-2]。GPS、Galileo等全球卫星导航系统及IGS各分析中心利用全球监测站的伪距和相位双频观测数据进行多星定轨,同时估计卫星轨道和钟差[3]。北斗二号卫星导航系统的监测站全部分布在中国境内,采用了星地双向时间比对技术测量境内卫星钟差,但是存在对地面时间同步设备依赖严重,系统差解算步骤复杂,钟差精度难以提高等问题[4]。
北斗三号全球卫星导航系统于2020年7月31日全面建成并开通服务,其星座由3颗GEO卫星、3颗IGSO卫星及24颗MEO卫星组成[5-6],卫星上搭载了铷原子钟、氢原子钟等多种型号的星载原子钟(表1)。不同卫星硬件结构及原子钟类型存在差异,星载原子钟的时频特性也各不相同[7],对于其星载原子钟的时频特性进行分析,具有十分重要的意义。由于GPS和GLONASS卫星在长期在轨运行过程中,积累了大量的精密钟差数据,学者们以此为基础,获得了大量的星载原子钟时频特性研究成果:文献[8]利用IGS精密钟差分析了GPS星载原子钟的频率准确度、稳定度和漂移率;文献[9]从时域和频域两方面对原子钟性能进行了分析;文献[10]利用国际GNSS监测评估系统(iGMAS)的精密钟差分析了4个GNSS系统的卫星钟性能[10]。但是,精密钟差会受到卫星轨道、监测站坐标及钟差、对流层参数、模糊度参数等多种参数误差的影响,尤其受到轨道误差的污染,使钟差序列呈现出与轨道周期一致的周期项,导致原子钟性能分析结果失真[11-12]。

表1 北斗三号星载原子钟基本信息
北斗三号卫星搭载了Ka波段星间链路载荷,实现了卫星与卫星之间的测量与通信,具有测距精度高、指向性好和抗干扰能力强的特点[13]。依托于星间链路,北斗三号通过境内上注、空中分发的方式,实现了整星座广播电文同步更新,即“一星通,星星通”。国内很多学者利用北斗三号实验卫星及组网卫星的实测数据,验证了星间链路对于实现星座自主导航,提升区域布站条件下卫星定轨精度的显著作用[14-18]。文献[19]研究了利用星间链路计算卫星钟差的方法及效果,但是通过星地双向时间比对测量境内卫星钟差,进而以境内卫星为节点,通过星间链路“一跳”,归算境外卫星钟差,但设备时延标定残差会导致钟差分层,广播钟差精度仅为0.7 ns。文献[20]基于北斗三号基本系统星座对整网平差进行了探索,取得了不错的效果。
星间链路观测量覆盖了卫星整个弧段,且每颗卫星都与10颗以上其他卫星建链。可以认为,卫星星座通过星间链路构建了一个结构很强的空间相对钟差观测网。本文基于北斗三号30颗组网卫星开展研究,将导航星座内所有卫星的原子钟视为一个钟组,利用星间双向观测实现钟组内部时差测量,以部分较为稳定的钟作为基准钟,建立星座拟稳原子时,得到各卫星星座拟稳钟差,再通过少量链路向BDT溯源,最终得到卫星相对于BDT的钟差,并以其作为观测量对北斗三号星载原子钟性能及钟差预报精度进行评估。为了验证方法的正确性和有效性,同时对比了星座拟稳钟差与GFZ精密钟差的差异。
1 星座拟稳钟差估计方法
北斗系统星间链路采用双单向测距体制,卫星根据规划进行建链,每次建链持续3 s,其中前1.5 s是正向测距通信,后1.5 s是反向测距通信。根据文献[15]的算法,利用先验卫星轨道和钟差信息对测距值进行位置和钟差改正,可以将两个相邻时刻的正反向测距值归算至同一中间时刻
ρmn(t)=|Rm(t)-Rn(t)|+c[Tn(t)-Tm(t)]+
(1)
ρnm(t)=|Rm(t)-Rn(t)|+c[Tm(t)-Tn(t)]+
(2)

分别将式(1)和式(2)求和做差,可以将距离和钟差信息解耦,得到两个卫星之间的相对距离和相对钟差,其中做差后得到的相对钟差可表示为

(3)
以相对钟差为观测量,计算星座拟稳钟差,首先要利用多项式模型将卫星钟差模型化
(4)

然后构建观测方程
(5)

仅利用星间链路观测数据无法将设备时延与卫星钟差解耦,需要通过其他方法进行标定,通常做法是将星座拟稳钟差与多星定轨钟差进行比对,将平均差值视为设备时延值,具体细节可以参考文献[20],在此不做展开。显然,星间链路观测得到的钟差都是相对钟差,仅利用星间链路观测数据估计卫星钟差是典型的自由网钟差,缺乏必要的起算条件,导致法方程秩亏。解决法方程秩亏的思路有两种:一是可以引入新的观测量,增加起算条件,向BDT溯源;二是增加约束条件,选择部分较为稳定的钟作为基准,认为其钟差之和为零,通过拟稳自由网平差[21],获取各钟相对于时间基准的变化量。为了防止在星地钟差溯源过程中引入新的误差,本文选择将若干台稳定性较好的氢钟作为基准,将其钟差之和固定为0
Tm(t)+Tn(t)+To(t)+…=0
(6)
(7)

2 星座拟稳钟差特性分析方法
原子钟特性分析常用的指标有频率准确度、频率漂移率、频率稳定度和钟差预报性能等。对于钟的使用者而言,较为关心的是频率稳定度和钟差预报性能。
2.1 频率稳定度分析方法
频率稳定性主要用来评价星载原子钟频率受环境、噪声等因素影响的起伏变化情况。表征频率稳定度的指标主要有阿伦系列方差和哈达马系列方差[22-23]。阿伦系列方差包括阿伦方差、重叠阿伦方差、修正阿伦方差和阿伦总方差等,它们对于调频闪变噪声和调频随机游走噪声收敛,但当平滑时间较长,频率存在趋势性变化时,对于调频随机奔跑噪声不收敛[22]。哈达马系列方差,包括哈达马方差、重叠哈达马方差和哈达马总方差等,它们不受频率趋势性变化的影响,对于调频随机奔跑噪声同样收敛。北斗三号的星载原子钟有铷钟和氢钟,铷钟的长期稳定性较差,显然不适宜用阿伦系列方差来评价,氢钟的长期稳定性虽然较铷钟好,但是也存在长期的趋势性变化,因此本文采用哈达马方差评价北斗三号星载原子钟的长期稳定度。
假设有一组频率偏差序列,{yn,n=1,2,…,M},采样间隔为τ0,M为数据总个数,可以计算得到哈达马方差
(8)

2.2 钟差预报方法
钟差预报是指采用一定的模型对已知钟差序列进行拟合,得到模型参数,再利用模型参数进行外推,得到预报钟差的过程。常用的钟差预报模型有多项式模型、周期项模型、灰色模型、求和自回归滑动平均模型及其各种改进模型,其中应用范围最广,精度最稳定的还是经典多项式模型。但是究竟应该选择几阶多项式模型,还应具体问题具体分析,如果模型阶数不够,则不能准确反映出钟速变化情况,如果阶数过高,则会造成过度参数化,导致钟速估计不准确,同样影响预报精度。
北斗三号搭载的氢原子钟具有较好的短稳和长稳性能,铷原子钟短稳与氢原子钟相当,但钟速长期稳定性比氢钟低。通常情况下,对于几分钟至几小时时长的超短期或短期预报应采用一阶多项式模型[24-25]。对于几小时至几天时长的中期预报,氢钟宜采用一阶多项式模型,铷钟则应考虑钟漂的影响,采用二阶多项式模型。对于几天至几十天的长期预报,则氢钟和铷钟都应采用二次多项式模型。
3 试验及分析
3.1 试验数据及预处理
选取2020年DOY 234—DOY 293,共60 d的北斗三号星间链路观测数据,计算各个卫星的星座拟稳时间。通过对北斗三号星载原子钟特性的初步分析,选取了长期稳定度较好的C26、C27、C28、C29和C38,共5颗卫星的氢钟为基准,认为它们的钟差之和为0。每次钟差估计的所用观测数据时长为300 s,滑动窗口为30 s。由于观测时长较短,所有卫星均采用一阶多项式模型。
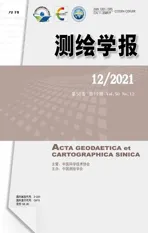
在原子钟长期运行过程中,由于调频调相操作等原因可能产生频率和相位跳变,而这些频率及相位跳变对于分析钟的频率稳定性和钟差预报能力而言是极为不利的。为了准确分析星载卫星钟的特性,本文对所有存在频率和相位跳变的钟进行修复,其中图1至图3分别为C32、C43和C60卫星星座拟稳钟差进行频率和相位跳变修复前后的对比,为了更加直观,已利用二次多项式去除钟差时间序列的趋势项。本文选取了GFZ提供的30 s采样率精密钟差作为对比组,频率和相位跳变对于GFZ精密钟差同样也会产生的影响,因此,需要进行频率和相位跳变修复。此外,GFZ的精密钟差中,所有卫星都存在明显的天与天之间跳变及同样的趋势性变化,分析认为,原因为GFZ轨道钟差采用的单天解算模式,导致不同解算弧段之间存在跳变。为消除基准问题的影响,同样将C26、C27、C28、C29和C38的钟差平均值作为基准,将所有卫星钟差与基准做一次差,生成新的钟差序列。
由图1可以看出,C32卫星在60 d时间里,有两次明显的跳频,频率时间序列呈3级台阶状,在对应时间,钟差的变化趋势也发生了明显的改变。通过检测频率跳变发生时间,对跳变前后的频率趋势进行拟合,可以计算频率跳变量,修复频率跳变,获得连续平滑的频率时间序列。
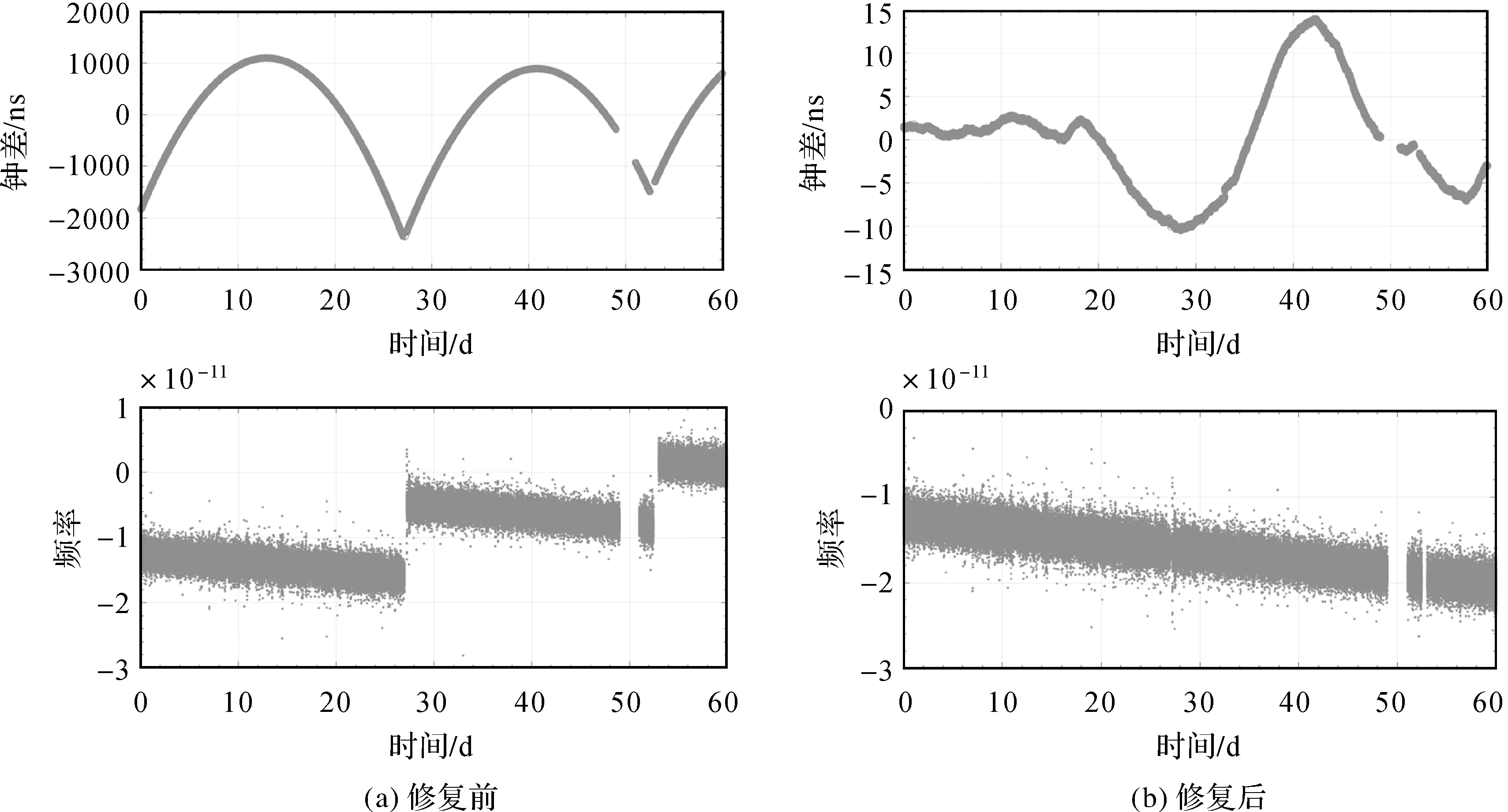
图1 C32卫星频率跳变修复前后变化(钟差时间序列趋势项已去除)Fig.1 Changes before and after frequency jump repair for C23(with the clock error trend removed)
由图2可以看出,C43卫星在60 d时间里,发生了一次相位跳变。通过检测相位跳变发生时间,并对跳变前后的钟差趋势进行拟合,计算相位跳变量,可以很好地修复相位跳变,得到连续平滑的钟差时间序列。

图2 C43卫星相位跳变修复前后变化(钟差时间序列趋势项已去除)Fig.2 Changes before and after phase jump repair for C43(with the clock error trend removed)
由图3可以看出,C60卫星在60 d时间里有多次明显的频率变化,间隔为1~3 d不等。进一步分析表明,利用本文计算C60的星座拟稳钟差及C59和C61的卫星钟差,也存在类似的现象,但其原因尚不清楚,由于频率的变化量很小,利用常规手段对其进行调频修复十分困难且没有意义。

图3 C60卫星钟差及频率时间序列(钟差时间序列趋势项已去除)Fig.3 Clock error and frequency time series of C60(with the clock error trend removed)
3.2 频率稳定度分析
分别利用星座拟稳钟差和GFZ精密钟差评估北斗三号卫星的频率稳定度。北斗三号卫星的频率稳定度变化趋势如图4所示,铷原子钟和氢原子钟的分类统计结果见表2和表3。

表2 北斗三号星载铷原子钟哈达马方差统计结果
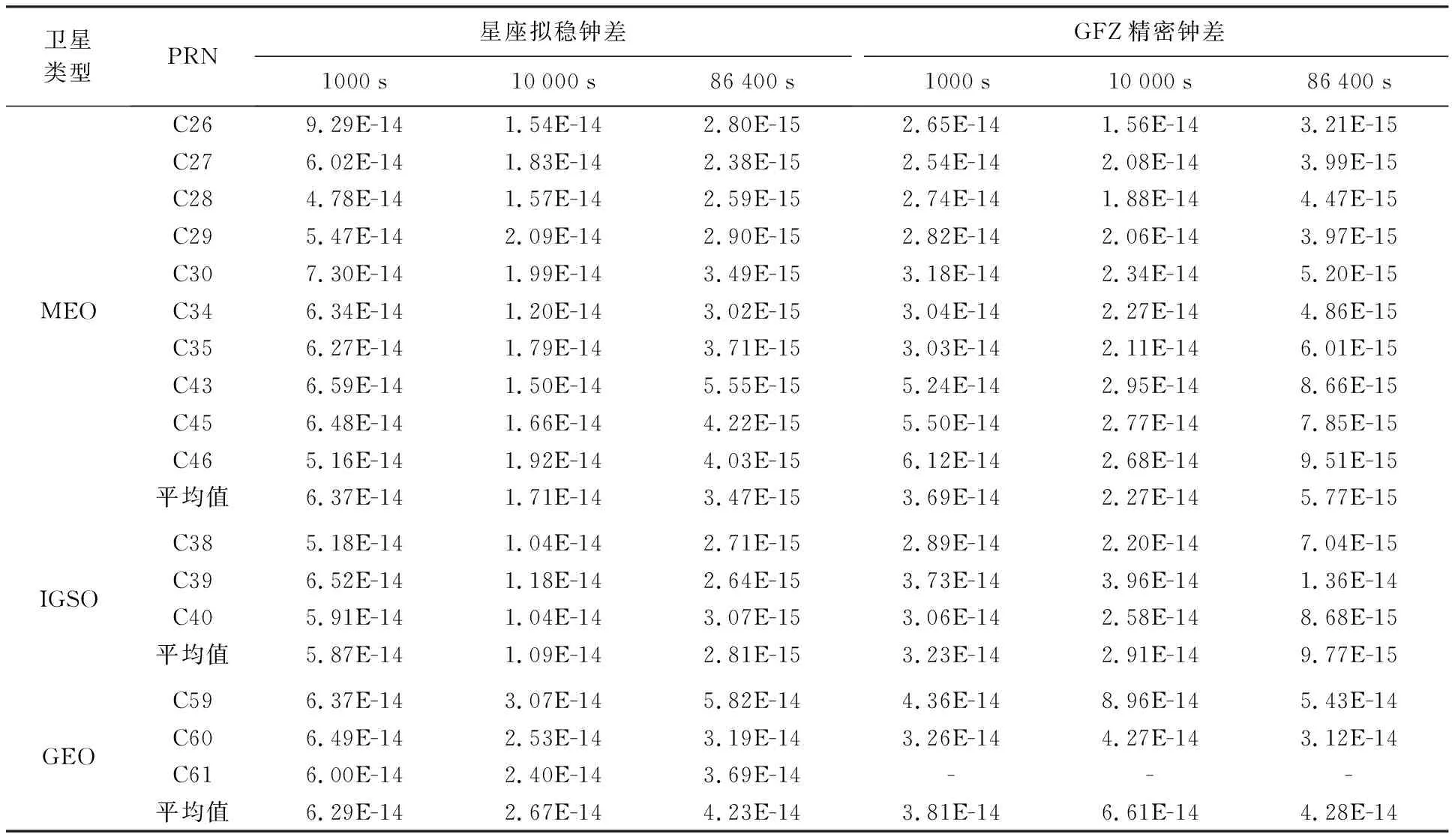
表3 北斗三号星载氢原子钟哈达马方差统计结果
利用星座拟稳钟差分析铷原子钟1000 s、10 000 s和1 d采样间隔的哈达马方差结果分别为6.8E-14、2.0E-14和8.2E-15,而利用精密钟差分析的结果分别为3.9E-14、2.3E-14和9.5E-15。星座拟稳钟差短期稳定性比精密钟差低,说明其噪声比精密钟差大,而其长期稳定性比精密钟差略好,则反映出其结果没有受到轨道周期的污染,更多的是反映原子钟自身的变化。精密钟差由于受到轨道周期的影响,长期稳定性稍差。由图4可以看到,哈达马方差在1E4采样率附近,存在明显的波动,就是由于钟差中吸收了轨道的误差。
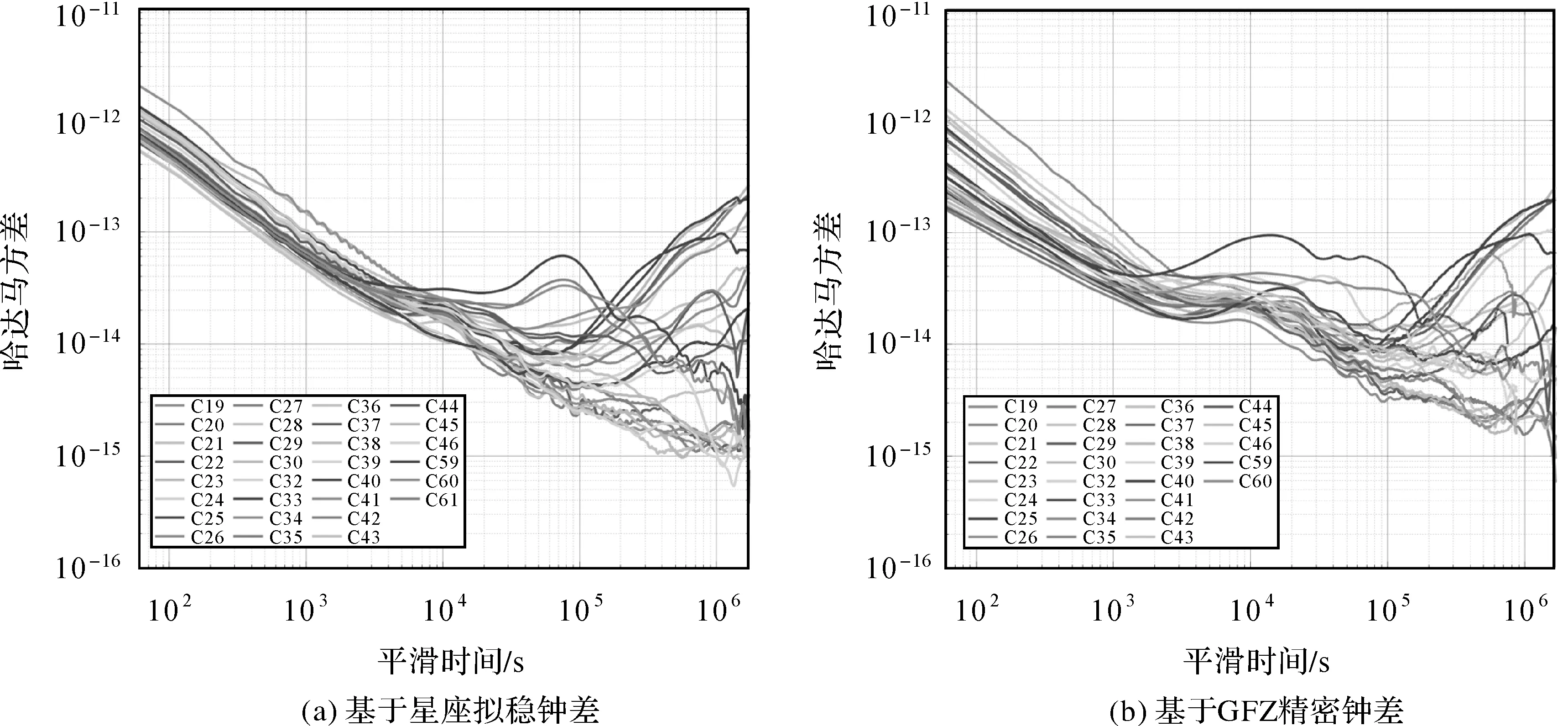
图4 北斗三号星载原子钟哈达马方差Fig.4 Hadamard variance of BDS-3 spaceborne atomic clocks
利用星座拟稳钟差分析MEO卫星氢原子钟1000 s、10 000 s和1 d采样间隔的哈达马方差结果分别为6.4E-14、1.7E-14和3.5E-15,而基于精密钟差的分析结果分别为3.7E-14、2.3E-14和5.8E-15。与铷原子钟类似,MEO卫星的氢钟星座拟稳钟差噪声比精密钟差大,但是具有良好的长期稳定性。
利用星座拟稳钟差分析IGSO卫星氢原子钟1000 s、10 000 s和1 d采样间隔的哈达马方差结果分别为5.9E-14、1.1E-14和2.8E-15,而基于精密钟差的分析结果分别为3.2E-14、2.9E-14和9.8E-15。说明IGSO卫星的氢原子钟具有很高的短期稳定性和长期稳定性。
利用星座拟稳钟差分析GEO卫星氢原子钟1000 s、10 000 s和1 d采样间隔的哈达马方差结果分别为6.29E-14、2.7E-14和4.2E-14,而利用精密钟差分析的结果分别为3.8E-14、6.6E-14和4.3E-14。其中,GEO卫星中长期稳定性较差的原因就是GEO卫星钟差中的不明原因频率波动。
3.3 钟差预报精度分析
分别利用星座拟稳钟差和GFZ精密钟差评估北斗三号卫星钟差的预报精度,钟差预报精度变化趋势如图5所示,统计结果见表4,其中长期预报精度统计方法为统计最后1 h预报误差的均方根误差作为预报误差。

图5 北斗三号卫星钟差预报误差Fig.5 Prediction errors of BDS-3 satellite clock error
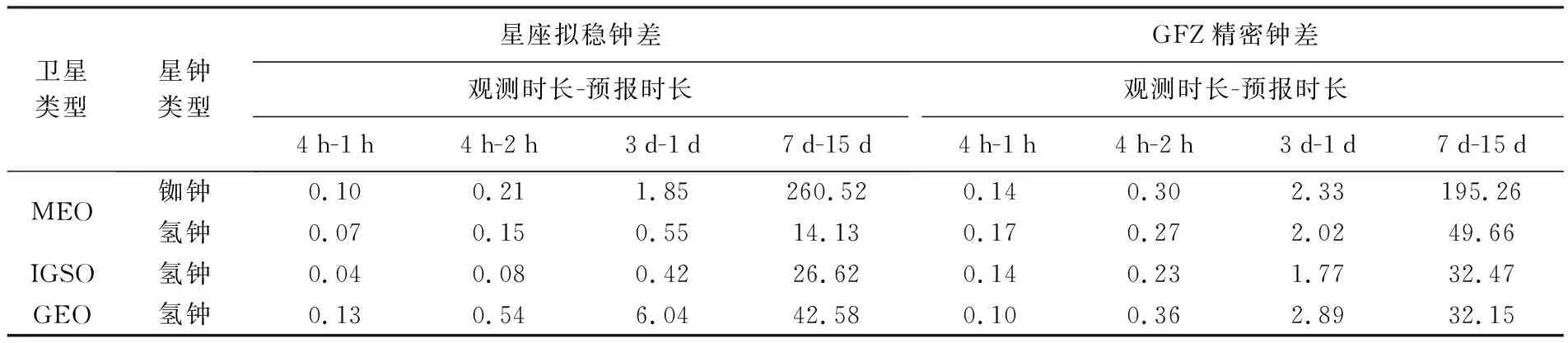
表4 北斗三号卫星钟差预报精度统计结果
结果表明:
(1) 利用4 h观测资料进行小于1 h的短期预报,氢钟和铷钟均采用一阶多项式,星座拟稳钟差预报误差RMS约为0.1 ns,GFZ精密钟差预报误差RMS约为0.14 ns,氢钟和铷钟精度相当。
(2) 利用3 d观测资料进行1 d时长的中期预报,氢钟采用一阶多项式,铷钟采用二阶多项式。氢钟的星座拟稳钟差预报误差约为0.5 ns(非GEO),铷钟约为1.9 ns,而氢钟的GFZ精密钟差预报误差约为2 ns,铷钟为2.3 ns。
(3) 利用7 d观测资料进行15 d的长期预报,氢钟和铷钟均采用二阶多项式。氢钟的星座拟稳钟差预报误差约为20 ns(非GEO),铷钟约为260 ns,而氢钟的GFZ精密钟差预报误差约为41 ns,铷钟为195 ns,铷钟的预报精度明显差于氢钟。
(4) 由于GEO卫星的不明原因频率变化,其预报精度明显低于其他卫星。
从结果看来,采取相同预报策略的情况下,星座拟稳钟差的长期预报精度及短期预报精度均优于GFZ的精密钟差,说明优于星座拟稳钟差几乎不受卫星轨道影响,精度及稳定性较GFZ精密钟差更好,且实时性远优于后者。
4 结论与展望
通过本文研究,可以得到以下几个观点:
(1) 星座拟稳钟差算法是对卫星导航系统时间基准天基化的初步探索。长期以来,北斗系统受限于不能全球布站,采用了星地时间同步法测量卫星钟差,导致卫星钟差测定对地面时间同步设备依赖严重,系统差解算步骤复杂,钟差精度难以提高。北斗三号星载原子钟,尤其是氢原子钟,具有良好的稳定性,MEO卫星氢原子钟天稳哈达马方差可达3.5E-15,IGSO卫星氢原子钟天稳可达2.8E-15,铷原子钟天稳哈达马方差约为8.2E-15。星座拟稳钟差算法初步验证了卫星导航系统时间基准天基化的可能,理论上只需一个地面站,即可实现整星座全弧段向BDT的溯源,大大简化了对于地面站的依赖。
(2) 星座拟稳钟差算法可大幅提高北斗三号空间信号精度。空间信号精度主要受广播星历误差和钟差误差影响(具体计算方法详见文献[26]),北斗三号将星间链路观测数据引入精密定轨,得到了优于10 cm的径向精度,而相对较低的广播钟差精度(约0.7 ns,)是制约空间信号精度进一步提高的主要瓶颈[13]。星座拟稳钟差算法可将卫星钟差的误差分为两个部分:一是星座拟稳钟差预报1 h 0.1 ns的误差,该误差会影响系统空间信号精度进而影响用户定位精度;二是时间溯源1 ns的误差[21],该误差造成星座拟稳时间相对于BDT的整体偏差,只会影响授时精度,不会影响定位精度。星座拟稳钟差算法可以分离钟差预报误差和时间溯源误差,使北斗三号空间信号精度再上一个台阶,达到甚至优于15 cm。
(3) 星间链路潜力有待进一步挖掘。星座拟稳钟差算法可以达到钟差1 h预报误差0.1 ns的水平,其精度、稳定性及钟差预报能力,不亚于目前GFZ的精密钟差产品[27-28]。然而星座拟稳钟差的实时性和计算量则远远优于后者,可以预见,星间链路在星基增强服务、精密单点定位服务、轨道机动后快速恢复等诸多方面的应用还有巨大潜力等待进一步挖掘。