基于热点位置分类的电流互感器发热故障判别方法
2022-01-11许志浩丁贵立赵天成
许志浩,罗 吕,袁 刚,康 兵,丁贵立,赵天成
(1.南昌工程学院电气工程学院,江西 南昌 330099;2.国网吉林省电力有限公司电力科学研究院,吉林 长春 130021)
1 引 言
当前,红外热像仪成为变电巡检中必不可少的检测工具,对变电设备的前期故障预测具有较大作用[1]。近年来,相关学者陆续提出了一些智能识别变电设备红外图像的方法[2-3],但对故障类型的识别研究较少。故障类型的判别是实现智能诊断的关键技术,也是影响相关研究者的典型问题之一。在人工智能技术和电力大数据背景下,从海量的红外图片中,选择并提取关键特征数据进行故障类型分析和诊断已经成为趋势,具有较好的研究价值和应用前景[4]。但是,变电设备红外图像表征出的热故障特征复杂多样,又因只有特征具有较强的描述性,利用人工智能算法才能够实现故障类型的准确判别。因此,如何从红外图像的复杂多样热特征中,选择并提取关键有效的特征,实现故障类型判别成为一大难题。
在现有的文献中,对故障类型的判别方法非常少,特别是对电压致热型缺陷的判别几乎没有。现有的故障类型判别方法,主要采用人工标注的方式形成数据图库,输入到深度学习算法中实现,例如文献[5]通过标注出故障区域,依据故障区域的位置人为给定故障类型标签,输入到神经网络中训练,实现故障类型的判别。该方法存在两个弊端:一是人工标注需要耗费大量的人力和时间;二是需要大量的故障样本图库作为算法支撑,对数据的依赖性较大。因此,在故障图谱数量有限的情况下,选择并提取有效特征对设备的故障类型进行判别和描述势在必行。文献[6]~[15]选择并提取变电设备红外图像中的像素温度值及基于温度矩阵的多维度特征值矩阵等信息,将其输入到SVM和RVM分类器、SOM深度学习网络中,实现变电设备的故障诊断。这些文献中,虽然选择并提取了一些热故障特征对设备的故障状态进行描述和判别,但是并未选择出关键热故障特征对设备的故障类型进行分析和研究。
由此可见,基于人工智能算法实现变电设备故障诊断的难点,关键在于选择并提取的热故障特征,能否把设备的故障类型精准的描述出来。为了解决这个问题,本文以电流互感器为例,提出了一种基于热点位置分类的电流互感器发热故障判别方法。在该方法中,首先运用CNN神经网络和YOLO融合算法完成电流互感器零部件检测。在此基础上,以各部件检测边框中心点所构成的直线为纵坐标,设备高的一半作纵坐标垂线,记为横坐标,以建立的二维坐标系作为参考基准;然后采用PCNN分层聚类迭代的方法分割故障区域,并采用灰度质心法获取故障区域的热点等效中心;最后选择并提取热点等效中心到坐标原点的距离、角度等参数来确定热点位置,达到判别热点位置属于电流致热型缺陷或电压致热型缺陷的分类目的,从而实现电流互感器故障类型的判别,本文工作流程图如图1所示。

图1 本文工作流程图Fig.1 The working flow chart of this paper
2 热故障特征分析与选择
据统计,电力系统中70 %的故障都是由变电设备的故障所导致[16],并且约50 %以上的变电设备在发生故障时,都会出现设备整体或部分区域的温度异常升高[17]。常见的故障类型有电流致热缺陷、电压致热型缺陷和综合致热型缺陷三种,其中,因接触不良等导致的电流致热型故障占所有故障比例高达90 %[18],虽然由于介损增大等导致的电压致热型故障占所有故障比例较小,但是当发生这类故障时,容易引起大面积发热,导致损坏设备或造成大面积停电等后果。同时,故障点随着位置信息的不同,所表征出来的故障特性也存在较大的差异。因此,选择并提取故障点的位置信息等特征,进行变电设备热故障分析和判别具有重要意义。本文在《DL/T664-2016带电设备红外诊断应用规范》[19]的基础上,提出一种基于热点位置分类的电流互感器发热故障判别方法,该方法通过提取故障点的位置信息特征,用于辅助电流互感器设备故障类型精准判定。电流互感器故障类型诊断依据如表1所示。
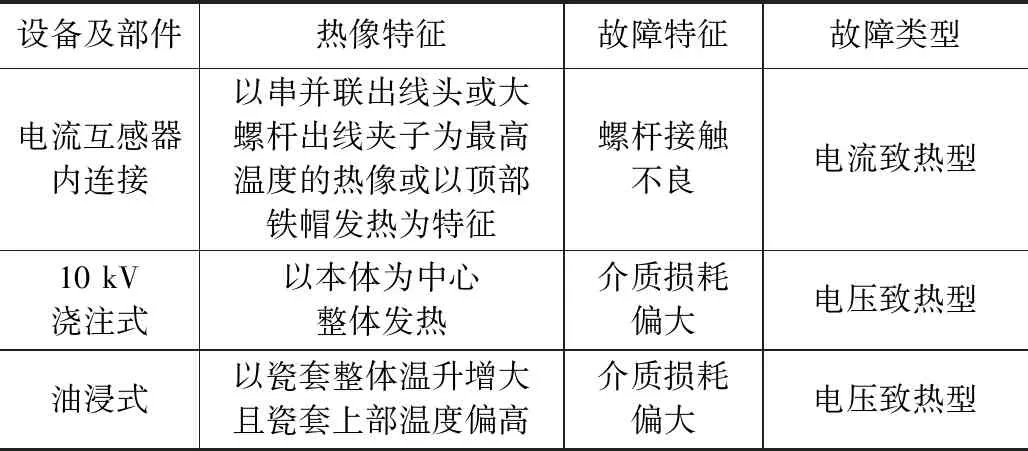
表1 电流互感器故障类型诊断判据Tab.1 Fault type diagnosis criteria of CT
3 电流互感器部件检测及基准的建立
3.1 电流互感器部件检测
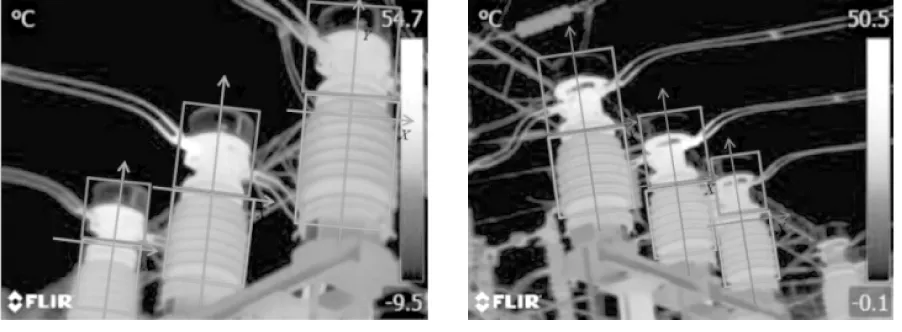
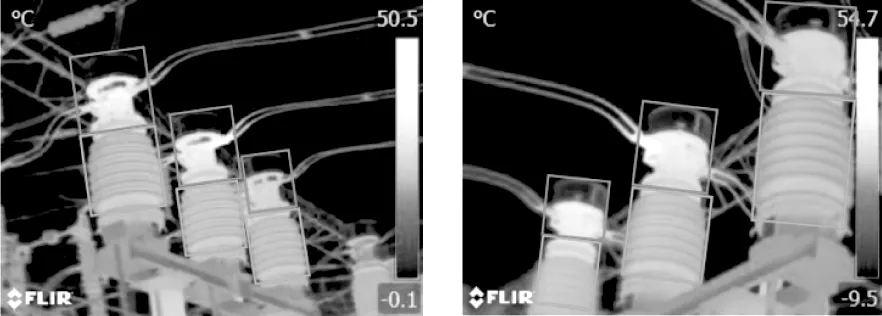
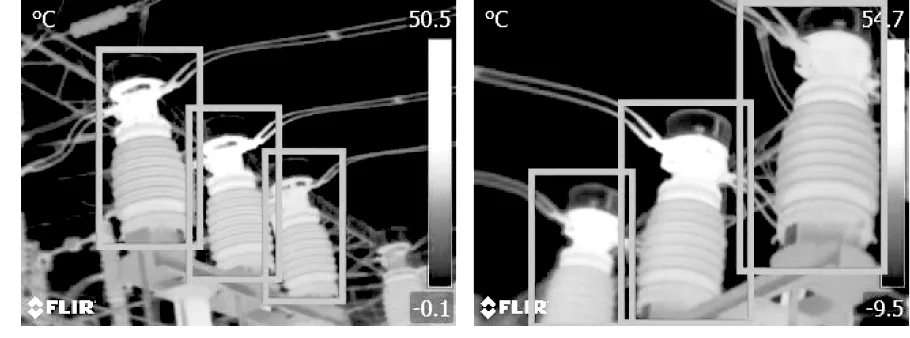
在变电站的复杂情况下拍摄红外图像,易受拍摄角度和拍摄环境等因素的限制,导致电流互感器在红外图像中呈现出大小不一、各式各样倾斜角度和背景复杂多样的情况。如图2(a)和(b)所示比较正立的图像非常少,对于这种简单情景下,采用YOLO[20]、SSD[21]和Fast-RCNN[22]等常见的目标检测算法,很容易获取设备的位置和尺寸大小等信息,并取得良好的效果。但大多数都是如图2(c)和(d)所示的复杂情况,如果采用常见的目标检测垂直框来检测设备,容易导致冗余的背景干扰信息和非必要的重叠,如图3所示。
(a) (b)
(a) (b)

(a)正立红外图 (b)正立红外图
(a) (b)
针对该问题,文献[23]中提出了一种基于深度卷积神经网CNN和YOLO算法来预测设备坐标及方向角等,该算法表现出了较好的性能。因此,本文运用该网络模型实现电流互感器的部件检测,效果如图4所示。
3.2 建立位置分类信息提取基准
位置分类信息基准的建立,是基于采用文献[23]中的网络模型检测出电流互感器零部件而实现的。此网络模型以大小为416×416×3的红外图像作为输入信息,输入到网络模型中图像被划分为S×S网格,各网格单元预测B边界框,边界框是由四条边组成的矩形框,分别包住物体的四个边界。每个盒子有5个参数描述坐标,一个置信值反映了盒子预测器的置信程度和K类概率值。所以,输出是一个S×S×(B·(5+1+K))维张量。在预测各单元的B包围盒时,采用锚盒方案。即是该网络模型不是直接预测坐标,而是预测与锚箱相关的5个参数(tx,ty,tw,th,tθ),且该模型是使用K-means算法对B个锚盒进行聚类,也就是从训练样本中获得B个不同大小的锚盒。假设单元格与图像左上角的偏移量为(cx,cy),锚框的宽度和高度分别为wa和ha,再根据预测参数,计算出单元格中预测边界框的坐标信息和方向角(x,y,w,h,θ),计算公式如下:
(1)
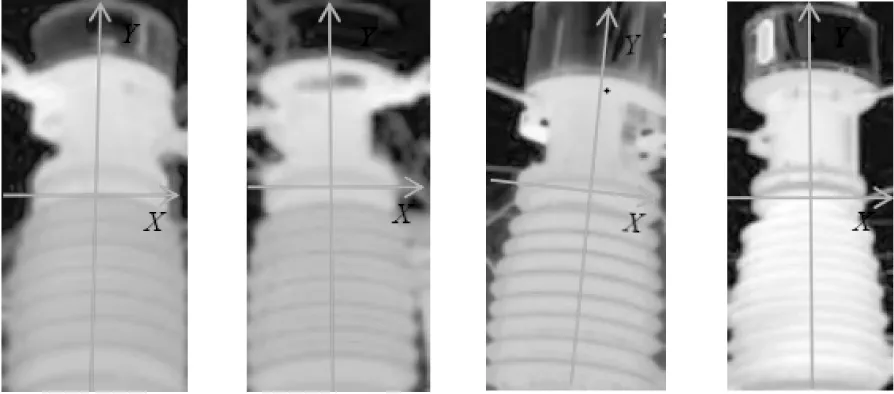
式中,σ(ti)是tx,ty在[0,1]中logistic函数的缩放比例,同时,在边界框的(x,y,w,h,θ)参数中,(x,y)是边界框的中心坐标,w和h是边界框的宽与高。以两个部件边界框的中心坐标构成一条直线,将其记作纵坐标Y,以各部件边框高的和的二分之一为分界点,作Y轴的垂直平分线,将其记作X轴,记坐标原点为(x0,y0)。以所建立的坐标系为基准,如图5所示。可通过计算故障区域的热点等效中心到坐标原点、横轴X、纵轴Y的距离以及与X轴之间的夹角等参数,确定故障点的位置,实现电流互感器的位置分类信息特征提取,作为电流互感器故障类型分析判别的基础。假设两检测边界框的参数分别为(x11,y11,w11,h11,θ11)和(x12,y12,w12,h12,θ12),则两个部件边界框的中心坐标构成的直线和坐标原点可分别表示为式(2)和式(3):
(2)
(3)
4 提取热点位置分类信息
热点位置分类是选择并提取热点的位置信息,根据热点位置信息判别热点属电流致热型缺陷还是电压型缺陷。其中,故障区域分割的准确性,直接影响热点等效中心点的查找和定位,从而决定热点位置分类信息提取精度。因此,故障区域分割是提取位置分类信息的关键。文献[24]提出了一种基于PCNN分层聚类迭代的故障区域自动提取方法,具有较好的分割效果。因此,本文采用该方法对故障区域进行分割。又因坐标基准是针对设备本体建立的,为了使热点等效中心的坐标信息与坐标轴的单位是统一量纲,通过3.1节识别获取检测框的顶点坐标信息,以顶点坐标为临界点剪切出故障相后,再对故障区域进行分割。完成故障区域分割后,利用灰度质心法[25]获取故障区域的热点等效中心(x1,y1)。此时,设备中心点的横坐标x0和纵坐标y0分别为剪切边框宽和高的一半。以图5为例,故障相和故障区域分割效果如图6所示。灰度质心法公式为式(4):
(4)
式中,m×n为图片分辨率大小,G(x,y)为各像素的灰度值,(x1,y1)为所求的灰度质心。
(a)故障相的分割
完成上述处理后,接着就是提取热点位置信息,主要包括以下三个步骤:
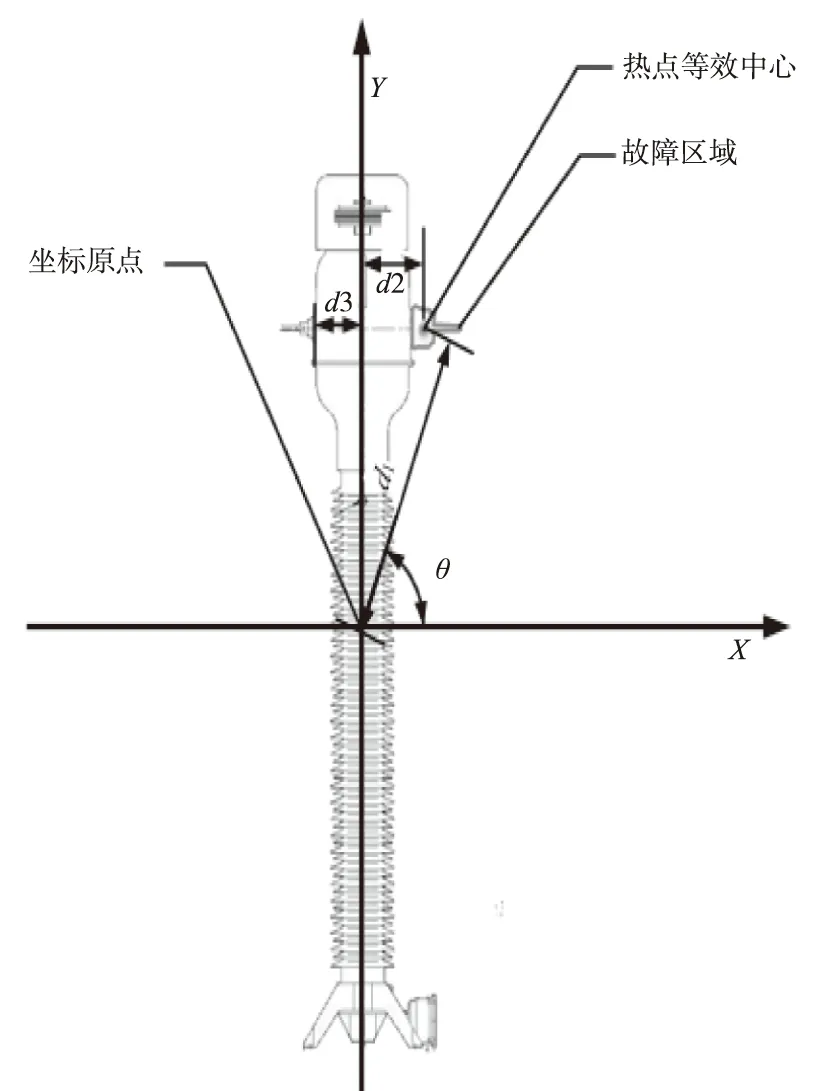
步骤一:计算热点等效中心到Y轴的距离d2与设备边缘到Y轴距离d3的比值δ,判断故障点处于设备本体内部还是外部,如式(5):
(5)
1)当δ>1,判定为本体外。
2)当δ≤1,判定为本体内。
步骤二:计算热点等效中心到坐标原点(x0,y0)的距离d1及两点构成的直线与X轴的夹角θ,如式(6),通过θ可以判断出故障区域的象限位置,可分以下两种情况分析:
(6)
当故障区域位于设备本体外部时。若0°<θ<90°,即故障位于坐标轴的第一象限,因只有接线端子位于设备本体外,则可以判断故障位于设备右边的接线端子上;若90°<θ<180°,即故障位于坐标轴的第二象限,则可以判断故障位于设备左边的接线端子上,从而可以判别出该电流互感器发生了电流致热型缺陷。
当故障区域位于设备本体内部时。若0°<θ<180°,故障位于坐标轴的第一或第二象限;若180°<θ<360°,故障位于坐标轴的第三或第四象限。
因正切函数是周期为π的周期函数,只采用角度完成故障点所在象限的定位存在不确定性,而通过第4节中剪切出故障相后,故障区域热点中心和坐标原点的量纲具有一致性。因此,本文为了更加精准的定位故障点的象限位置,运用角度、故障区域热点中心与坐标原点的坐标值对比分析实现。包括以下四种情况:
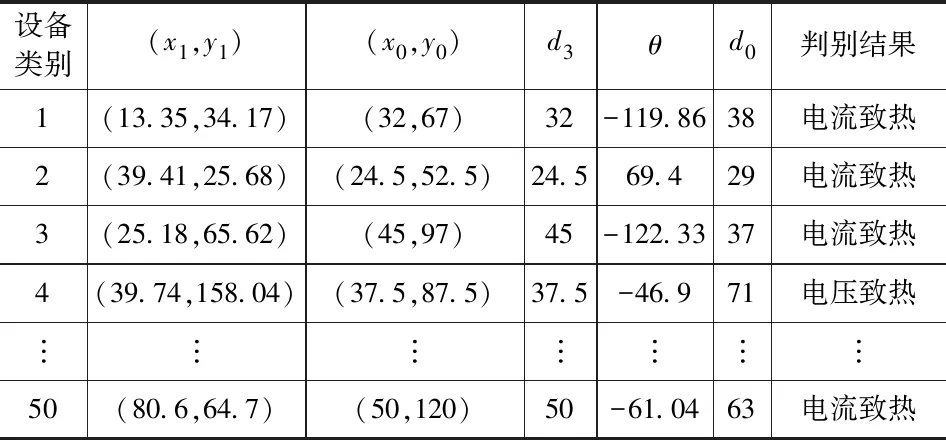
若x1>x0且y1 2)若x1 3)若x1 4)若x1>x0且y1>y0,则热点位于第四象限。 步骤三:通过上述判据确定热点处于设备内部还是外部以及象限位置后,再结合电流互感器故障类型诊断的依据和故障区域热点等效中心偏离坐标原点的程度d1,进一步定位和判断故障位置,从而实现故障类型的判别,如式(7)。故障类型的判别算法流程图和位置信息各参数效果分别如图7和如图8所示。 图7 故障类型的判别算法流程Fig.7 Fault type discrimination algorithm flow 图8 位置信息参数示意图Fig.8 Schematic diagram of location information parameters (7) 为了验证本文提出方法的可行性,以50张电流互感器红外故障图像为例,对其进行算法试验。运用第4节中提取热点位置分类信息方法,得到50组电流互感器的位置信息参数及判别结果如表2所示。 表2 提取的位置信息参数及判别结果Tab.2 Extraction of location information parameters and discrimination results 详细分析以图5中电流互感器为例,表2中前4个分别是图5(a)、图5(b)、图5(c)、图5(d)四个电流互感器提取的结果。通过FLIR Tool工具进行故障分析,可得出图5(a)和图5(b)的故障相均发生在中间相;图5(c)和图5(d)的故障相分别发生在从左到右的第三相和第一相。由表2可以看出,(a)、(b)、(c)三个图的δ比值均大于1,判定为本体外;(d)图的δ比值小于1,判定为本体内。运用(6)式可以得到θ分别为60.4°、69.4°、57.7°和-46.9°,结合对比故障区域热点中心和坐标原点的坐标值及正弦函数的图像和性质,同时,通过分析可知图5(b)故障点位于设备外端且在第二象限,由第4节可得图5(b)的实际热点等效中心为(14.91,25.68),则可得到最终的θ分别为-119.86°、69.4°、-122.33°和-46.9°。因此,可以得出: 图5(a)、图5(b)和图5(c)中电流互感器的故障分别发生在偏离坐标原点38个像素点的第二象限、偏离坐标原点31个像素点的第一象限和偏离坐标原点37个像素点的第一象限,且均位于设备本体外,因只有接线端子位于设备本体外,则可以判别出图5(a)、5(b)、5(c)故障分别发生在电流互感器的左接线端子、右接线端子和左接线端子上,根据图9中的故障类型判别依据,可以得出,图5(a)、5(b)、5(c)三个电流互感器均发生了电流致热型缺陷。 2) 图5(d)中电流互感器的故障发生在偏离坐标原点71个像素点的第三象限,且位于设备本体内,又因电流互感器套管部分的高度往往是大于其余部分高度和,所以位于三、四象限的部分一般都是套管,结合图8中的判据即可得出,图5(d)中的电流互感器发生了电压致热型缺陷。 本文首次提出了一种基于热点位置分类的电流互感器发热故障判别方法。该方法中,首先运用CNN神经网络和YOLO融合算法完成电流互感器零部件检测,在此基础上,以各部件检测边框中心点所构成的直线为纵坐标,设备高的一半作纵坐标垂线,建立二维坐标系作为参考基准;然后在运用剪切的方法将故障相分离出来的情况下,利用PCNN分层聚类迭代的方法分割故障区域,并利用灰度质心法获取故障区域的热点等效中心;最后选择并提取热点等效中心到坐标原点的距离、角度等参数,并采用这些参数判别热点位置的故障类别属性,从而实现电流互感器故障类型判别。以50张电流互感器红外故障图像为例,对本文的方法与依据表1判据人工诊断的方法进行对比分析,结果表明,该判别方法准确率高达92 %,具有一定的实用性,可较好的推广到其他变电设备故障判别中。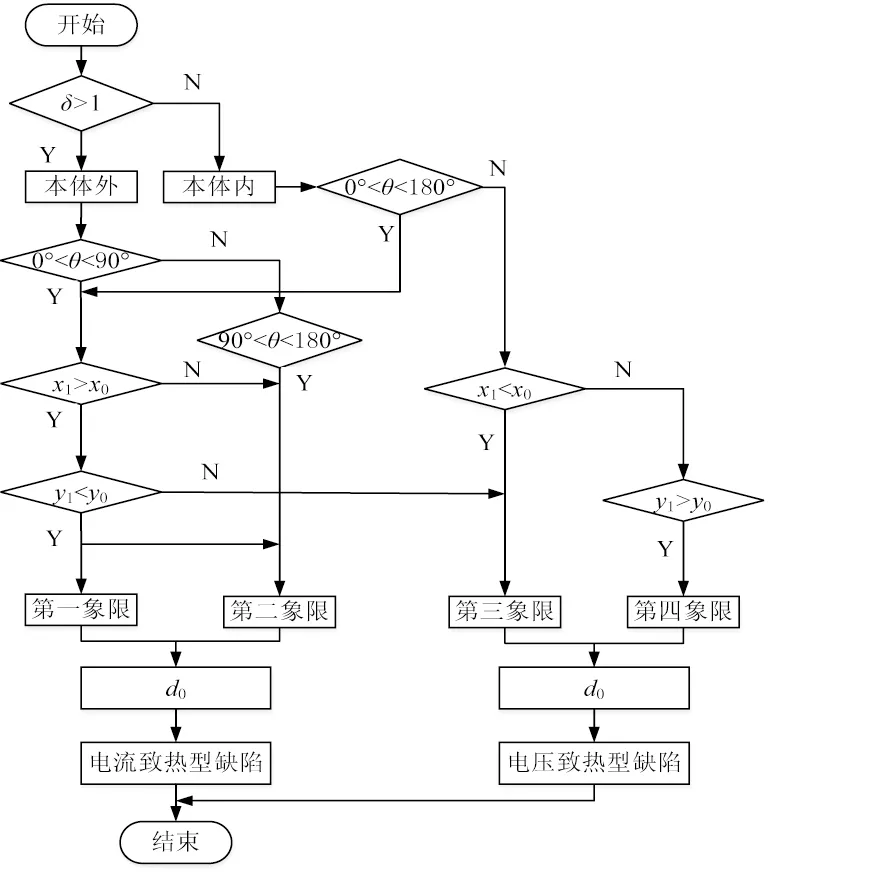
5 实验结果与分析
6 结 论