激光跨介质通信中跳时隙的编解码方法
2022-01-11蒋红艳
廖 欣,蒋红艳,何 宁
(桂林电子科技大学信息与通信学院,广西 桂林 541004)
1 引 言
随着各国对海洋安全和领土保护愈发重视,水下激光通信将发挥重要作用,如何在复杂海洋环境中实现信息可靠传输和保密安全,是跨介质激光通信亟需解决的问题。采用机载、星载和舰载的蓝绿激光直接实现对水下目标的通信,探索适合于海洋通信的调制和编码技术,充分发挥激光技术和空中平台两者优势,利用特定波长激光在水中穿透特性、低损耗特性、灵活性和隐蔽性的空海激光通信技术,受到世界各国专家学者的广泛关注,并得到快速发展,已成为空海通信中很有潜力的一种通信方式[1],在未来海洋资源开发利用与通信体制的技术研究都具有重要意义。
激光在海上大气传输时,散射吸收效应、湍流效应和衰减效应等情况的出现都会对激光光束质量造成一定影响[2]。跨介质激光通信是一种在开放信道环境下信息传输方式,传输链路上信号是可以随意截获,其信息传输安全性和可靠性则难以保证[3]。在海洋上实现跨介质无线光通信信道(大气、水)具有随机性、复杂性和不可预测,特别是水下信道的不透明,信号传输受吸收、散射、湍流和海面因素影响造成信号衰落,产生光强闪烁、光束漂移和波前畸变,降低信息传输的可靠性[4]。海上大气环境与陆地大气环境在许多方面存在差异,文献[5]分析了海上大气湍流对光电设备通信、跟踪和成像性能的影响;文献[6]基于海上大气折射率起伏功率谱模型,推导了光束漂移的理论表达式,并进行了近海环境激光传输实验验证。文献[7]提出一种采用双通道跳频通信系统同步捕获方法,利用同步过程中载波频率与被调制时间信息并行捕获方式来缩短同步时间,提高信息传输同步的隐蔽性和抗干扰能力。针对海洋通信特点,选择脉冲位置调制(Pulse Position Modulation,简称PPM)是一种最有效的适合在背景光限制的水下通信调制方式,它具有光功率和频带利用率高,信道资源占用低和抗干扰能力强[8]。
在跨介质无线通信环境下,海上信道变化无常,大气信道中的云、雨、雾,海面波浪、游离植物,水下信道的悬浮颗粒、浪涌、湍流等都是引起激光光束传输过程光斑散射的因素,对光场散射吸收提供空间条件。虽然激光器光束发散角较小,但经一定距离的路径传输会发生光斑散射和扩束现象,造成光信号扩散在传输方向上的一个区域空间范围内,使得通信信号被截获的风险增加。若不采用一些新的技术机制来适应信道环境实现快速有效通信,而以固定时隙进行信息传输,其安全性无法保证。为解决海洋通信中信号可靠传输问题,本文提出一种跳时隙的脉冲位置调制编解码方法,通过不同导频码与时隙类型的组合关系,探讨一种以字节组帧的跳时隙通信,可有效降低因水下信道传输过程时延误差积累,缩短同步处理时间,以保证接收信号采集时刻的准确判断,实现数据信息快速捕获。采用增加通信时隙变化的类型结构,可提高信息传输中被截获破译的难度,能更好地适应复杂环境下传输安全与可靠性要求,为语音和数据信息的水下实时通信提供一种新的技术手段。
2 脉冲位置调制及跳时隙传输帧结构
脉冲位置调制是将一组nbit二进制数据映射到2n个时隙内一个对应时隙上的单个脉冲信号[9]。
设定nbit的数据M(m1,m2,m3,…mn),则与脉冲位置L的映射关系记为:
L=m1+2m2+…+2n-1mn
(1)
设Sn为调制信号,Pc为光脉冲功率,时隙宽度为Tc,t为时域位置,则有:
(2)
对于一个2 bit的二进制数进行脉冲位置调制,在时域上调制的时隙数为22=4,由公式(1)可得到L对应于相应脉冲位置的映射关系,能满足编码调制的唯一性。
为便于接收信息帧起始位置识别,数据传输中一般在一帧数据的前端加入同步脉冲,接收端可通过检测这些帧同步脉冲参数判断当前脉冲为数据还是起始位[10]。脉冲位置调制信号的同步是实现对数据进行解调的重要依据,图1所示为具有一定宽度引导信号和数据脉冲组成帧结构。
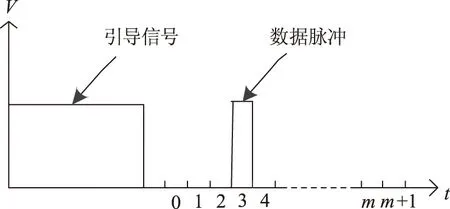
图1 具有引导信号和数据脉冲帧结构Fig.1 A frame consisting of pilot signal and data pulses
根据激光在水下信道传输特性,若采用宽度一定的单个激光脉冲信号,在时域上会产生展宽和时延造成判断误差。因此,依据脉冲位置调制的思路,可以采用检测两个脉冲间隔作为判断信号帧起始依据。
以4 PPM、16 PPM和256 PPM三种常用的字节数据脉冲位置调制方式为例,通过在每种字节数据时隙前加入不同的导频码时隙类型来组成跳时隙PPM帧结构。图2是在同一时域下传输三种不同时隙单字节组帧的示意波形。
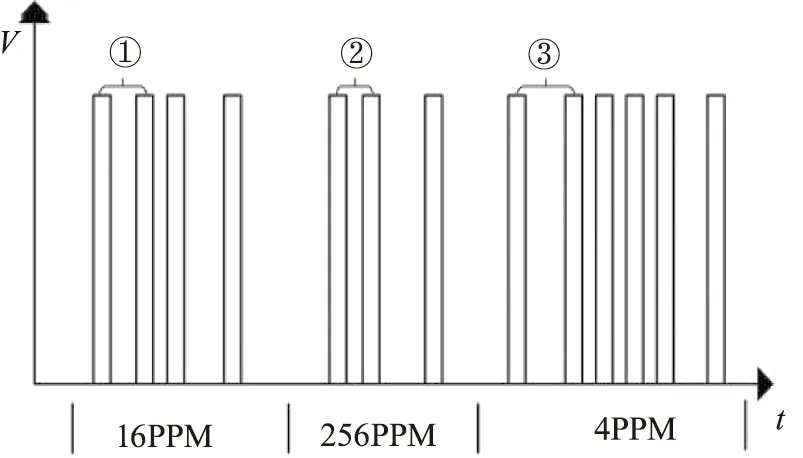
图2 三种不同时隙类型字节帧结构Fig.2 Three one-byte-data frames with different timeslots
图2中①、②、③标注分别代表3种时隙类型的导频码,由图2看出不同时隙类型导频码与数据脉冲有对应关系。从提高系统信息传输安全性方面考虑,通信发射时隙类型组合顺序可依据收发双方需求任意组合,引导脉冲间隔可随机变换,以增加接收方外的第三方对数据捕获解码难度,目前在通信信号领域可采用跳频技术、信息加密技术、信道编码技术等进行保密传输的安全处理。
3 系统组成与编解码
3.1 系统组成
跳时隙水下激光通信系统结构如图3所示,系统主要由信息编码调制、激光驱动、脉冲激光器、水介质信道、激光信号接收放大整形和信息解调译码6部分组成。

图3 实验系统组成Fig.3 The experimental system
信息采用字节形式由编码调制模块处理将其配置为不同时隙的PPM调制方式,发射端激光器受跳时隙信号控制输出的激光由空间入射到水介质信道传输,接收端通过FPGA检测导频码来获得对应的调制类型,并完成数据解调。
3.2 跳时隙编解码软件实现
系统数据信息以256 PPM、16 PPM和4 PPM三种调制类型按字节组帧进行软件编码,可通过程序将待传送信息划分为3部分。系统编码的时隙类型与导频码间隔关系设定如下:
导频码间隔t1对应256 PPM;导频码间隔t2对应16 PPM;导频码间隔t3对应4 PPM。
为保证编码调制的时隙类型呈现随机性,选择利用FPGA定时器数据获得,在发送时刻读取定时器的数据对3进行求余数,根据得到的余数采用上面三种时隙类型完成字节组帧编码,然后用组合的串行输出数据帧脉冲驱动激光器[11]。PPM调制信息传输的关键是通过时隙同步和符号同步来保证接收端进行正确解调,且符号同步是建立在时隙同步的基础上[12]。
本系统接收端FPGA利用脉冲上升沿作为触发信号,其功能是提取时隙同步信号和帧同步信号[13],当接收到脉冲上升沿时启动短周期脉冲开始计数,待接收到第二个脉冲时停止计数,然后读取计数器数值并将计数器清零,同时进行间隔判断;已知时隙宽度为Tc,相邻脉冲时间间隔为ΔT,当检测到两脉冲间隔为t1、t2、t3时,则判定为不同时隙类型帧开始,接下来检测从导频码第二个脉冲到第一个数据时隙脉冲的间隔以及之后相邻时隙脉冲的间隔ΔT,依据各时隙类型的字节组帧规则,若满足条件(ΔT-Tc)/Tc,即实现对每帧数据信息的解码还原,并送上位机显示,同时再进入下一轮询时隙类型字节帧数据脉冲接收。图4为系统接收软件解码流程。
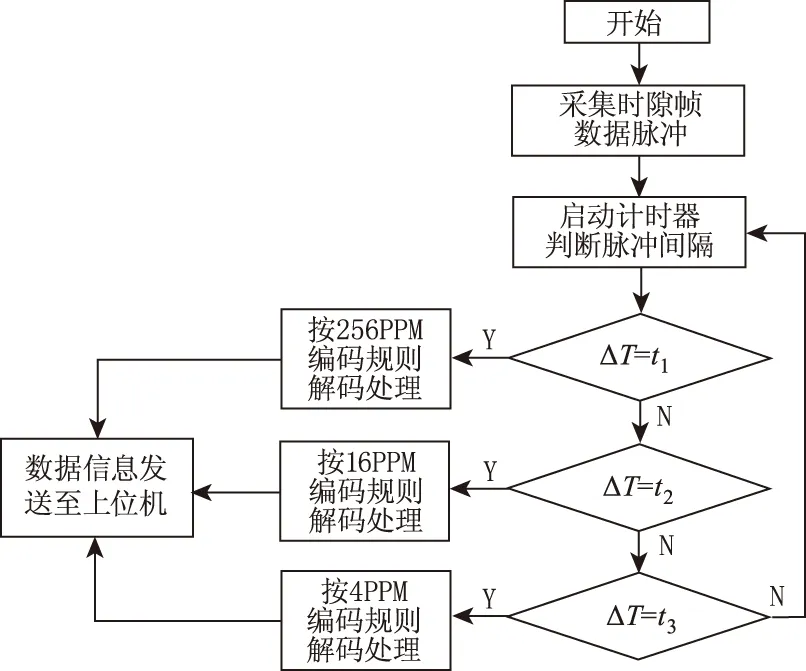
图4 解码流程Fig.4 The decoding process
4 实验测试分析
系统实验采用波长为532 nm脉冲型激光器,利用时隙编码输出发送“J12”和“W20”字符信息模拟“经度”和“纬度”方位指令,输出信号按照单字节组帧依次以设定的时隙类型循环顺序进行发送。
图5是激光发射脉冲能量5 mJ,经实验室2000 mm×800 mm×800 mm水槽传输,由接收端测试得到的数据时隙信号帧波形。图中上半部分为光电探测放大处理信号,下半部为整形后的脉冲信号,其信号响应位置有对应关系。
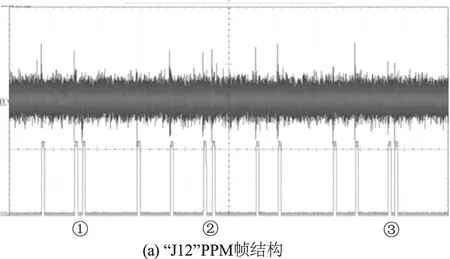
图5 接收信号帧波形Fig.5 The waveforms of received frames
图5(a)为“J12”3个字符的帧结构传输波形,图5(b)为“W20”3个字符的帧结构传输波形,图中数据信息是以字节组帧形式传送,每帧采用双脉冲作为导频码,标识①为16 PPM帧头,标识②为4 PPM帧头,标识③为256 PPM帧头,其余脉冲是与时隙类型对应的数据信息。传统跳频和脉冲位置调制通信是以固定参数特征实现传输,这对非合作接收方的信号检测和参数截获提供突破口,系统采用变参数的时隙类型组合编码和短帧处理技术,一是可提升信息的抗截获优势,二是减少传输带来的时延积累,提高信息位置判断准确性和识别效率。实验中通过设置多组不同信息数据进行传输测试,在发射光视距范围内按照通信双方时隙跳变规则接收信号得到较好的跟随,进一步验证以字节组帧的时隙类型变化编解码正确性。
5 结 论
阐述了跨介质激光水下通信中信道特点,针对开放信道环境下信号传输风险,提出一种跳时隙的通信机制,分析了跳时隙PPM的时域帧结构与软件编解码实现过程,通过导频码与时隙类型的组合关系,采用3种时隙类型实现字节组帧的跳时隙字符编码信息传输,完成激光水下数据信息传输实操测试。测试表明,在大气与水下介质信道中,采用字节组帧的信息传输,有利于帧同步处理,实现快速响应,可降低长信息帧在传输过程中受到信道随机噪声干扰而导致的接收不完整错误,只要通信双方的时隙帧结构按照约定规律进行变化,对实际系统的语音和数据信息的实时传输具有一定优势。若通信双方的时隙导频码类型采用更多形式组合实现更为复杂的时隙跳变技术,则有利于减少信号被截获破译机率,为空海一体化通信的安全性和隐蔽性提供一种新的技术手段。