频率扫描阵列的ISAR成像技术
2022-01-11施兴相廖可非贾新迪
施兴相, 廖可非,2*, 贾新迪
(1.桂林电子科技大学信息与通信学院, 桂林 541004; 2.桂林电子科技大学卫星导航定位与位置服务国家地方联合工程研究中心, 桂林 541004)
频率扫描阵列是一种电扫描阵列,通过改变工作频率而使天线阵元间的相位发生变化。能够实现阵列天线波束扫描及指向目标[1]。因为其天线波束变换灵活和硬件成本低等优势[2],频率扫描阵列雷达在目标识别方面呈现着重要作用[3]。但是,当频率扫描阵列的波束指向某一目标方位时,频率扫描阵列中各辐射单元间馈线产生的相位差不能改变发射或接收信号的频率[4]。一旦频率改变,会导致相位误差的产生。相位误差会随信号瞬时带宽的增大而变大,最终引起波束指向的偏移以及造成波瓣形状不对称,副瓣电平增高等现象[5]。因此,频率扫描阵列对信号瞬时带宽有较大的约束。在配合使用需要发射宽带信号的逆合成孔径雷达(inverse synthetic aperture radar,ISAR)成像技术时,频率扫描阵列受到了很大限制[6]。
为了解决上述问题,引入了频率分集ISAR成像技术[7]。在研究过程中,要明确此技术与频率分集阵列的不同,避免两者的概念混淆。频率分集阵列的工作原理是在同一时刻,每个阵元以不同的频率向目标发射信号,实现整个探测空域的自动扫描[8]。而频率分集技术采用的是分时发射单频信号的方法,即在不同时刻向观测目标发射不同频率的信号,所以频率分集ISAR成像技术通过将不同频率的单频信号合成宽带信号从而获得距离向分辨能力[9-10],并利用目标与雷达的相对运动合成孔径,得到方位向分辨能力,最终形成对运动目标的二维成像能力。将频率分集ISAR成像应用在频率扫描阵列上,可形成一种新的成像体制,在该体制中发射频率信号与波束指向角度还存在一个对应的关系,此关系将在成像模型部分进行推导。通过发射多个单频信号并结合频率合成技术,可实现用于频率扫描阵列的ISAR目标成像方法。结果表明该成像方法既可以形成波束指向目标,又可以克服发射频率信号时对瞬时带宽的限制,从而实现对运动目标的二维成像。因此,频率分集ISAR成像在频率扫描阵列上的应用对降低ISAR成像系统的复杂度、制造成本以及提升系统带宽资源的灵活度和提高成像的质量等方面具有重要意义[11]。
首先介绍频率分集联合频率扫描阵列ISAR成像基本原理和后向投影(back propagation,BP)算法原理,并建立基于频率分集技术的频率扫描阵列ISAR成像模型;然后对成像模型进行仿真分析,验证该模型的有效性,接着再分析该模型系统性能,主要是分析此雷达系统的阵列参数与目标航迹参数对成像的距离向分辨率和方位向分辨率产生的影响;最后给出结论。
1 原理
1.1 成像模型
ISAR的工作方式是雷达保持静止的状态并对持续移动的目标进行观测[12]。在观测运动物体时雷达会产生相对转动的角度,得到方位向分辨率,再通过发射大宽带信号得到距离维度相关信息,由此具备对目标的二维成像能力。然而,发射大宽带信号对系统硬件有较高的要求,也会给信号带宽资源带来极大的浪费[13]。现在利用频率分集技术,通过发射单频信号解决上述问题。
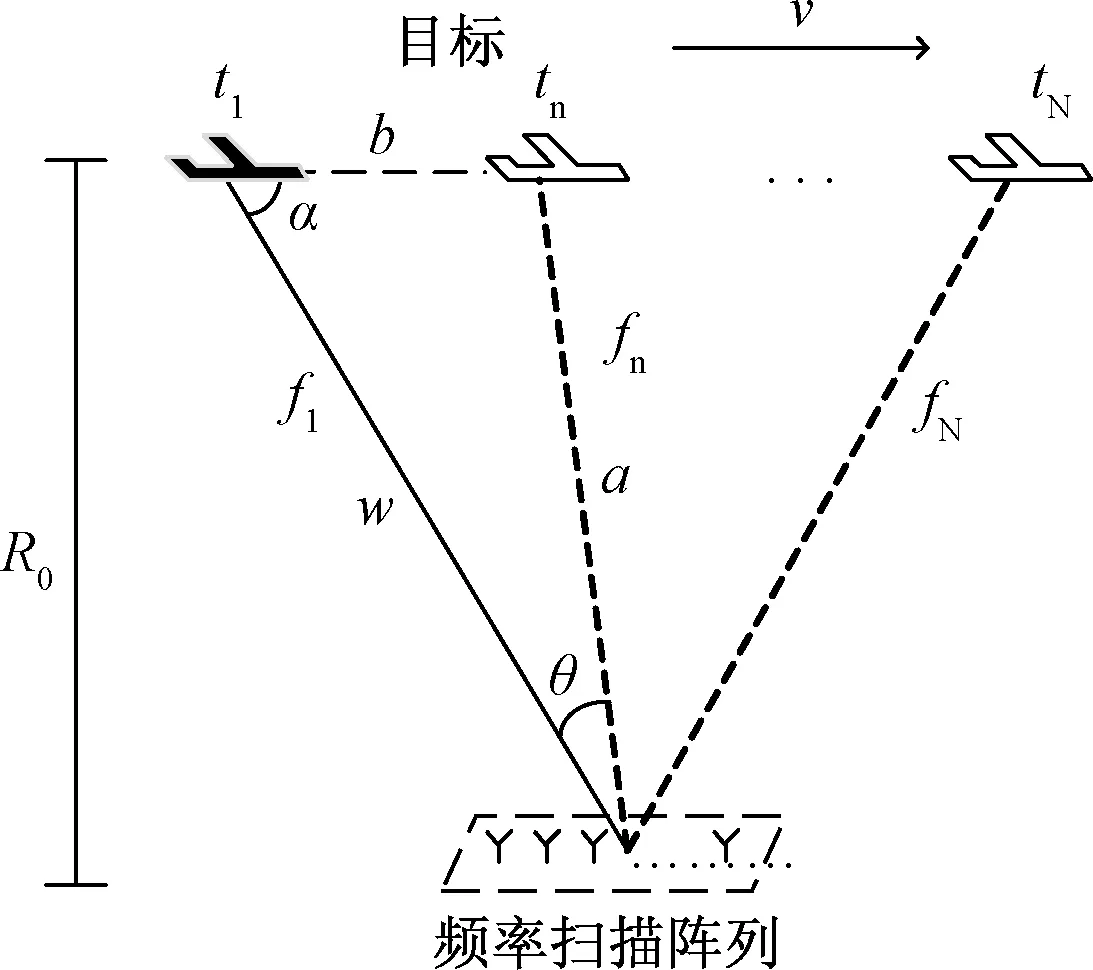
雷达距离目标的垂直距离为R0;w为初始时刻目标到雷达的距离;a为tn时刻目标与雷达间的距离;目标在空中沿直线以速度v匀速飞行;b为目标的飞行距离,且b=vtn;N为观测次数;α为初始时刻目标到雷达的俯视角度;在雷达视角中,目标较初始时刻转过角度为θ图1 基于频率分集技术的频率扫描阵列ISAR模型Fig.1 ISAR model of frequency scan array based on frequency diversity technology
结合以上的构想,基于频率分集技术的频率扫描阵列ISAR模型如图1所示。tn时刻雷达向观测目标发射的单频信号fn计算公式为
fn=f0+snΔf,n=1,2,…,N
(1)
式(1)中:sn表示在[1,N]任意一个数;Δf为频率增量,并设定载频f0远远大于任意倍数的频率增量snΔf。
根据图1中所示,结合所设置的各部分变量,可得到关系式为
(2)
式(2)化简可得
(3)
通过对频率扫描阵列天线结构的进一步分析[14],可以发现天线发射频率与波束扫描角度的关系。图2所示为频率扫描阵列的结构模型。

图2 频率扫描阵列结构模型Fig.2 Structure model of frequency scanning array
频率扫描阵列各单元等间距排列,阵元个数为M,d为阵元间距,各阵元由馈线l串联连接。通过观察,由传输线引起的阵元之间的相位差φ1为
(4)
当阵列对空中目标进行扫描时,相邻阵元之间的波程差φ2为
(5)
那么相邻阵元在空间的某点相位差可表示为
(6)

(7)
式(7)在仅考虑幅值的情况下可以化简为
(8)
由洛必达法则可知,式(8)的最大值发生点为
(9)
注意式(8)右侧取2kπ,因为l>d,且λg>λ,从而Δφ>0。进一步化简得
(10)
式(10)即为天线波束指向角度与不同频率的单频发射信号之间的关系,可以看出结合频率分集的概念,可以在波束指向和发射频率间建立起一种确定关系,通过在不同时刻发射不同信号频率值,使天线波束的指向角度跟随着发生变化,解决了频扫天线波束的指向问题。
继续将式(10)与式(3)进行联立,可以得到新的式子,即
(11)
式(11)过于复杂,不能直观地看出发射信号频率与各项参数之间的关系,做进一步化简可以得到
(12)
(13)
由上述过程,推导出了频率扫描阵列发射频率与目标飞行角度之间的关系,可以看出这里的发射频率由多个参数确定,其中大致包括频率扫描阵列与运动目标这两部分的参数。不同的发射频率具有不同指向角度的波束,将不同频率回波信号合成宽带信号,进一步处理获取距离向分辨率。联合上述参数确定成像需要的带宽,可以提高带宽资源利用率。
1.2 成像算法
后向投影(BP)算法的核心内容是“补偿-求和”[15]。首先对观测区域进行网格划分(散射点包含在其中),然后对整个网格矩阵进行遍历,获得散射点与雷达之间的时延,最后将时延补偿后的回波信号做相干累加,获得目标的图像。
根据以上思路,假设频率扫描阵列各辐射单元等间距排列,辐射单元个数为M,雷达在不同观测时刻,向目标场景发射不同频率的单频信号,若设当前观测时间为tn,所需发射的频率为fn,此时发射天线发射的信号可以表示为
x(tn)=s(tn)exp{j2πfntn},n=1,2,…,N
(14)
式(14)中:s(tn)为信号的复包络。
选择阵列中第一个辐射单元为参考单元,对成像区域中某一目标散射点p进行观测,该散射点沿阵列射线的法向夹角为θp(tn),与雷达的距离为Rp(tn),电磁波沿空间的传播速度为光速,用c表示,则第m个辐射单元的回波信号时延表示为
(15)
扫描信号被目标反射,由雷达系统接收并进行数字采样、混频后得到tn时刻的回波信号,即
m=1,2,…,M
(16)
式(16)中:σp为该散射点散射系数;s(tn)的变换相对比较慢,可忽略不计。此时得到的是某一观测时刻的回波矩阵,更新观测时间,得到N个观测时刻的回波信号矩阵,即
Xe(tn)=[xe(t1)xe(t2) …xe(tN)]
(17)
使用后向投影算法,把成像的区域划分为网格的形状,并且对每个网格节点(x,y)做相应的时延补偿,该点相对于第m个辐射单元的时延补偿项可以表示为
(18)
式(18)中:Rx,y是网格节点(x,y)到达雷达的距离;θx,y是该节点相对于雷达法线方向的角度,所以tn时刻补偿相位后回波的信号矩阵表示为
(19)
将N个观测时刻进行相位补偿的回波矩阵相参累加,即可获得目标二维像为
(20)
2 仿真实验及分析
2.1 仿真验证
为了验证本文所提频率扫描阵列ISAR成像方法的有效性,进行了基于MATLAB的仿真实验。设置的仿真参数如表1所示。

表1 仿真参数Table 1 Simulation parameters
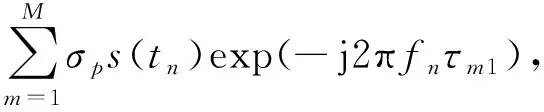
成像过程中目标相对于雷达转过的角度范围为-5°~5°,假设目标做刚体运动,将目标等效为5个散射点,分别设置在(0°,10 km),(0°,9.97 km),(0°,10.03 km),(3°,10 km),(-3°,10 km),目标散射系数为1,目标在场景中的分布示意图和仿真图分别如图3和图4所示。
对比图3与图4可以看出,使用频率扫描阵列ISAR体制对运动目标进行成像,仿真结果可以重建目标散射点的相对位置。仿真成像结果表明,本文所提的频率扫描阵列ISAR目标成像方法,通过发射多个单频信号并结合频率合成技术,可以实现对运动目标的二维成像,解决了频率扫描阵列不能发射宽带信号的缺点。相比于宽带相控阵ISAR成像,降低了系统复杂度与成本。
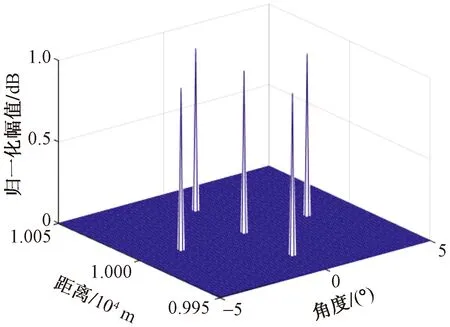
图3 目标散点分布示意图Fig.3 Schematic diagram of scattering point distribution

图4 成像仿真结果Fig.4 Results of imaging simulation
2.2 系统性能分析
2.2.1 基本特性
通过式(12)计算求得扫描区域两个边界角度相应的频率值,频率增量即为此系统所能达到的最大带宽。因此,频率扫描阵列ISAR成像系统的距离向分辨率表示为
(21)
式(21)中:B为频率扫描阵列ISAR系统的带宽。由式(21)可知,由于只存在系统带宽这一可控变量,所以它对雷达的距离分辨率影响很大,系统的分辨率随着带宽的增加得到有效的提升,这是ISAR常用的实现成像高精度效果的处理手段。
逆合成孔径雷达利用雷达和观测目标之间的相对移动的过程合成孔径,从而获得方位向上的分辨能力。相比于实孔径雷达,逆合成孔径雷达不但可以缩减天线的长度,而且拥有更高的分辨率,其表达式为
(22)
式(22)中:f0系统初始Δθ时刻载频;N为观测次数;Δθ为相邻两个观测时刻所偏移的角度,可写作Φ=NΔθ,Φ即为成像过程中的合成孔径目标。
2.2.2 阵列参数对系统性能的影响
本节将在目标航迹参数确定的情况下,分析阵列参数对成像系统性能的影响,其中包括阵元个数、阵元间距以及馈线长度。目标航迹参数如表2所示。

表2 目标航迹参数Table 2 Target track parameters
根据式(12)可知,在航迹参数确定的情况下,η可看作是一个常数h,则发射频率可重新表示为
(23)
由于给的参数过多,为了方便区分和理解,将距离向分辨率和方位向分辨率分开讨论,现在结合式(21),先讨论以下几个因素对距离向分辨率造成的变化。
(1)阵元个数造成的影响。图5为模拟回波距离向切片图,表明距离向分辨率会随着阵元个数的增加而提高。原因是频率扫描阵列形成波束指向目标时,多个阵元将回波数据进行多次累加,累加的结果使得成像结果图的旁瓣越来越低,提升成像效果。所以相比于单阵元系统,多阵元系统在成像效果方面更具有优势。
图5 不同阵元个数距离向仿真切片图Fig.5 Slice diagram of range simulation with different number of array elements
(2)阵元间距的影响。由式(23)可知,当η>0,即阵元间距增大时,表达式分母变小,发射信号频率增大。波束指向最大偏转角所需的频率变大,系统带宽也会变大,距离向分辨率随之提升。图6为d与ρr之间的反比关系图。
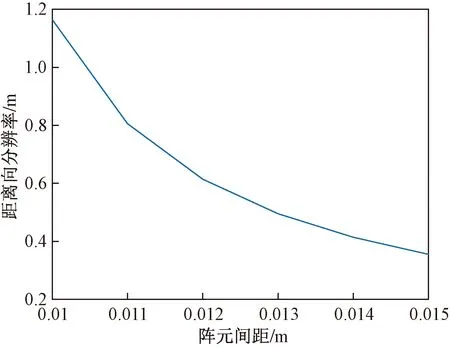
图6 阵元间距与距离向分辨率关系Fig.6 Relationship between array element spacing and range resolution
(3)馈线长度的影响。成像系统的距离向分辨率与系统带宽有关,由式(23)可知,因为相对介电常数大于零,当馈线长度增加时,系统合成带宽减少,成像系统的ρr逐渐变大。所以馈线长度l与系统的ρr成正比关系。
假设上述影响因子不变,继续探讨它们与方位向分辨率的关联,得到如下相关的结果。
(1)阵元个数。根据式(22),雷达方位向分辨率取决于雷达系统的初始时刻的载频、观测次数以及相邻两个观测时刻所偏移的角度,而阵元的个数并不会引起上述3个重要因素的变化,故方位向分辨率保持不变;图7为M=3、M=10、M=15情况下的模拟回波方位向切片图,仿真图也表明阵元个数对方位向分辨率只产生了微弱的影响。
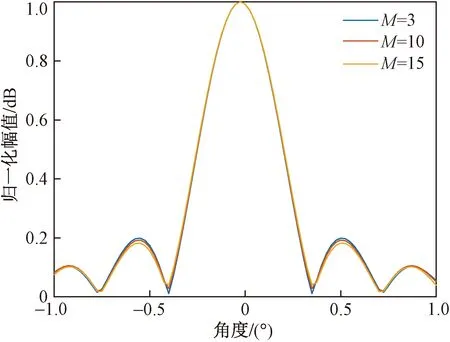
图7 不同阵元个数方位向仿真切片图Fig.7 Slice diagram of azimuth simulation with different number of array elements
(2)阵元间距和馈线长度造成的影响。如图8所示,阵元间距变大会导致信号发射频率的增加,但这只会影响距离向分辨率。在式(22)中,分别对照3个主要变化因素,可知当固定系统其余的参数值,只改变馈线长度或改变阵元间距的数值,并不会对成像系统的ρθ产生影响。

图8 阵元间距与信号发射频率关系Fig.8 Relationship between array element spacing and signal transmitting frequency
2.2.3 航迹参数对系统性能的影响
在频率扫描阵列参数确定的情况下,分析目标航迹参数对系统性能的影响,其中包括目标飞行速度、观测次数以及初始距离。参数如表3所示。
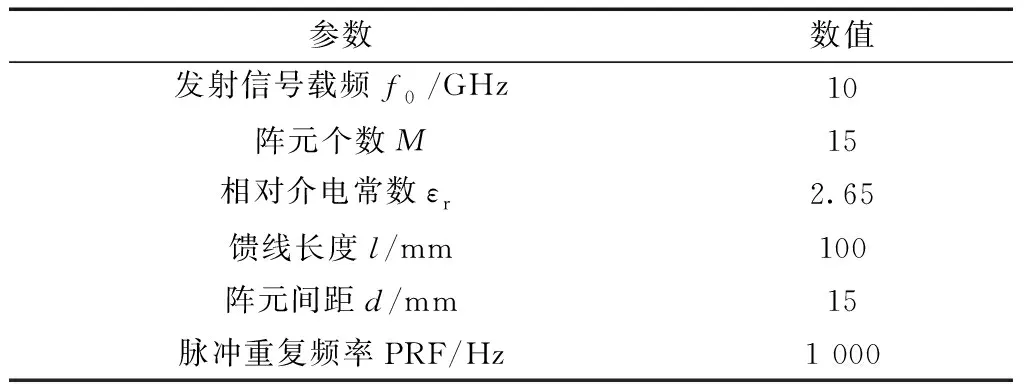
表3 阵列参数Table 3 Array parameters
(24)
式(24)的分子没有改变,但由于给了不同的定值,分母则发生了很大的变化,距离向分辨率与上述因素的关联如下。
(1)飞行速度和观测次数。根据式(24),不能直观地看出系统发射频率fn与目标飞行速度关系,采用控制变量法,控制观测次数、雷达垂直距离、目标飞行速度这3个影响因素。其中先控制观测次数、雷达垂直距离为定值,观察飞行速度与分辨率的变化,如图9所示。再使雷达垂直距离、目标飞行速度为定值,观察观测次数与分辨率的变化,如图10所示。最后,随着目标飞行速度或观测次数的增大,目标飞行速度和观测次数都与ρr呈反比关系。这两个因素导致系统发射频率增大,所以系统带宽随之变大,进一步使ρr减小。

图9 飞行速度与距离分辨率关系Fig.9 Relationship between flight speed and range resolution
(2)雷达到目标的垂直距离对系统性能造成的变化。根据式(24)采用控制变量法,ρr与雷达垂直距离呈正比关系变化。
最后,还有对系统方位向分辨率的影响,有些因素本质上影响相同,可分为两个方面说明。
(1)飞行速度和观测次数。由仿真参数可知,脉冲重复频率PRF=1 000 Hz,则脉冲重复间隔TPRI=0.001 s,假设每隔20个脉冲重复间隔观测一次,那么飞行目标在相邻的两次观测时间内移动的距离为
D=20VTPRI
(25)
在观测次数和初始距离确定的情况下,目标飞行速度越快,成像过程中目标径向飞行距离越大,所转过的角度也会增大。方位分辨率与f0和NΔθ有关,因此系统的方位向分辨率会随着目标飞行速度的增加而变小。同样的,由于相邻两次观测时间内移动距离是确定的,所以观测次数对ρθ的影响与飞行速度参数对ρθ的影响本质上相同,都随着NΔθ的增加,导致ρθ减小。
(2)雷达到目标的垂直距离对系统性能的影响。根据图1系统模型,在目标飞行速度,观测次数确定的情况下,雷达垂直距离越大,目标相对于雷达所转过的角度越小。由式(22)可知,NΔθ为合成孔径,即目标相对于雷达转过的角度,因此ρθ会随着初始距离的增大而增大。
3 结论
频率扫描阵列可以通过改变工作频率控制天线波束的扫描,但发射宽带信号时对瞬时带宽有较大的约束和限制,进而降低了雷达成像的质量。所以将频率分集ISAR成像方法与频率扫描阵列联合应用,构建频率扫描阵列ISAR成像系统,解决了频率扫描阵列不适合于ISAR成像的问题,并经过实验后得出以下的结论。
(1)频率分集ISAR成像与频率扫描阵列联合应用,在频率改变的同时实现波束指向和宽带信号合成功能,可解决信号瞬时带宽约束问题,结合BP成像算法,完成了对目标的二维成像,与相控阵相比,可降低ISAR成像成本。
(2)采用控制变量法讨论了阵列参数与目标航迹参数对系统距离向分辨率和方位向分辨率的影响,给出了频率扫描阵列ISAR成像的应用指导。
