对移动目标射击自动校正方法研究
2022-01-11鄢砚军彭志召杨海丰
鄢砚军,彭志召,杨海丰
(1.中国人民解放军91892部队, 海南 三亚 572099; 2.陆军装甲兵学院, 北京 100072)
1 引言
科学技术的发展推动狙击步枪的精准度、可靠性、智能化程度越来越高,作为高精度的武器,狙击步枪的研究趋势,不仅体现在提高枪械可靠性、子弹威力、机动性和超远距离射程上,其瞄准镜的智能化程度受到越来越多的关注。狙击步枪瞄准镜的发展历程[1-2]从光学瞄准镜、可变焦光学瞄准镜[3]、红外热成像光学系统、激光测距光学系统、可变焦光电光学系统、带弹道解算系统的光电瞄准镜,目前智能瞄准狙击步枪已经进入学者的研究范畴。
对静止目标的射击,各国优秀的狙击手能靠经验计算,通过调整瞄准镜校正旋钮获得较高的命中率。但对移动目标的射击需要通过预判瞄准,射击的命中率特别是对快速移动目标的射击命中率不高。世界各国培养优秀的狙击手需要从优秀的射手中进行挑选,进行专项的狙击训练,需要很长的训练周期。培养一名对移动目标精准射击的狙击手难度更大。提高狙击步枪对移动目标的射击精度已成为当前狙击步枪研究的趋势,为此研究了一种狙击步枪对移动目标射击自动校正的方法。通过该方法,狙击手只需将校正后的瞄准点对准移动目标后射击就能实现对移动目标精准射击的要求。
2 设计思路及基本设置
2.1 设计思路
通过轨迹相交法实现对移动目标校正射击。将探测目标和子弹运动参数的传感器集成在瞄准镜装置中,在获得相关参数后由系统计算出目标和子弹的运动轨迹,目标的运动轨迹固定,子弹的运动轨迹根据枪支射角的变化进行调整,系统计算出两者轨迹相交点的位置后,通过改变枪口射角调整子弹运动轨迹[4-5],使子弹的运动轨迹和目标的运动轨迹在预定的位置相交。
现实中为快速到达目的地,目标多采用直线运动方式,目标的运动轨迹可以由多条直线段构成,因此设定狙击手从跟踪瞄准到命中目标的时间段内目标的运动轨迹为直线。
以枪口为坐标原点建立坐标系,其弹道轨迹如图1所示。子弹的运动轨迹为一条偏移的抛物线,弹道轨迹受空气阻力、重力加速度、风速、风向、温度和子弹速度等多种因素影响。图中v0为子弹初速度,v1为飞行过程中的速度,Fk为空气阻力,G为重力,Fh为横向风力,Fz为纵向风力。
2.2 基本设置
狙击步枪是高精度[6]武器,同一款狙击步枪的参数基本一样,子弹的重量、形状和火药的配比生产时都经过严格检查,各种数据基本一致,设置击发后子弹初速度大小、子弹的质量和形状等参数数据相同。狙击步枪设计时都会使子弹飞行的章动角最小化,枪管膛线赋予子弹高速旋转,子弹在有效射程内能保持平稳飞行,设定子弹有效射程内受空气阻力的迎风面横截面为固定值。在有效射程内,设定一个射击过程中气压、气温、湿度和密度、风速及方向等空气气象条件保持在稳定值。
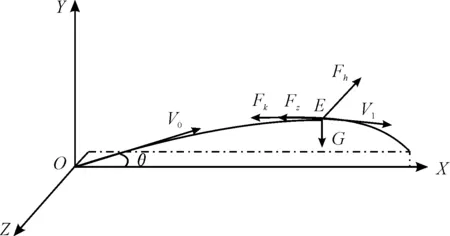
图1 狙击步枪子弹弹道曲线Fig.1 Ballistic curve of sniper rifle bullets
3 目标及子弹运动点位分析
3.1 目标运动点位分析
以瞄准镜目镜中心为三维坐标原点,定义水平面正北方向为X轴,水平面正东方向为Z轴,重力反方向为Y轴。在整个狙击过程中,目标从被瞄准、跟踪到命中经过5个位置点,分别为初始定位点A、跟踪定位点B、计算定位点C、目标瞄准点D、命中点E,如图2所示。

图2 目标从跟踪到命中过程中的位置示意图Fig.2 The schematic diagram of the target from tracking to hit
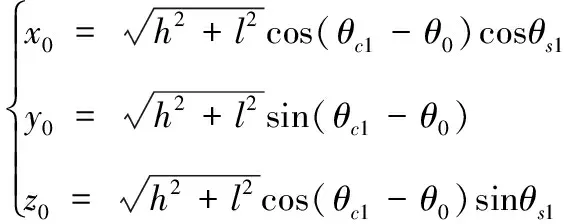
本文主要对匀加速直线运动的目标跟踪射击进行研究,通过三点定位法确定目标运动速度和加速度,每隔固定时间t0进行一次定点。设定目标从A点移动到B点和从B点到移动C点的时间均为t0。狙击手发现目标后,通过调整射角对准目标,在A点进行初始定位,设定通过激光测距机测量A点距离为LA,角度测量仪测量水平角度为θs0,垂直角度为θc0,则A点坐标为(xm0,ym0,zm0),即(LAcosθc0cosθs0,LAsinθc0,LAcosθc0sinθs0)。

目标运动到C点后,系统结合弹道解算系统和校正系统计算出校正的瞄准点,设定狙击手从使用校正后的瞄准点瞄准目标到扣动扳机的反应时间为t1,在这个过程中目标从C点移动到D点,移动到D点时狙击手扣动扳机,子弹击发脱离枪管。
子弹脱离枪口后,从枪口处M点沿弹道轨迹飞向目标,由弹道解算系统计算出子弹从击发到命中目标的飞行时间t2,在t2时间内目标由D点移动到E点,子弹由M点飞行到E点,在E点目标的轨迹与子弹的轨迹相交,表示子弹命中目标。
3.2 子弹运动点位

(1)
狙击步枪子弹受火药燃烧膨胀的推力和枪管的挤压作用在出膛瞬间获得一定初速度,设子弹击发后子弹获得初速度为v0,vx0、vy0、vz0分别表示初始速度在X轴、Y轴、Z轴上的速度分量,由三角函数计算出子弹的速度分量。
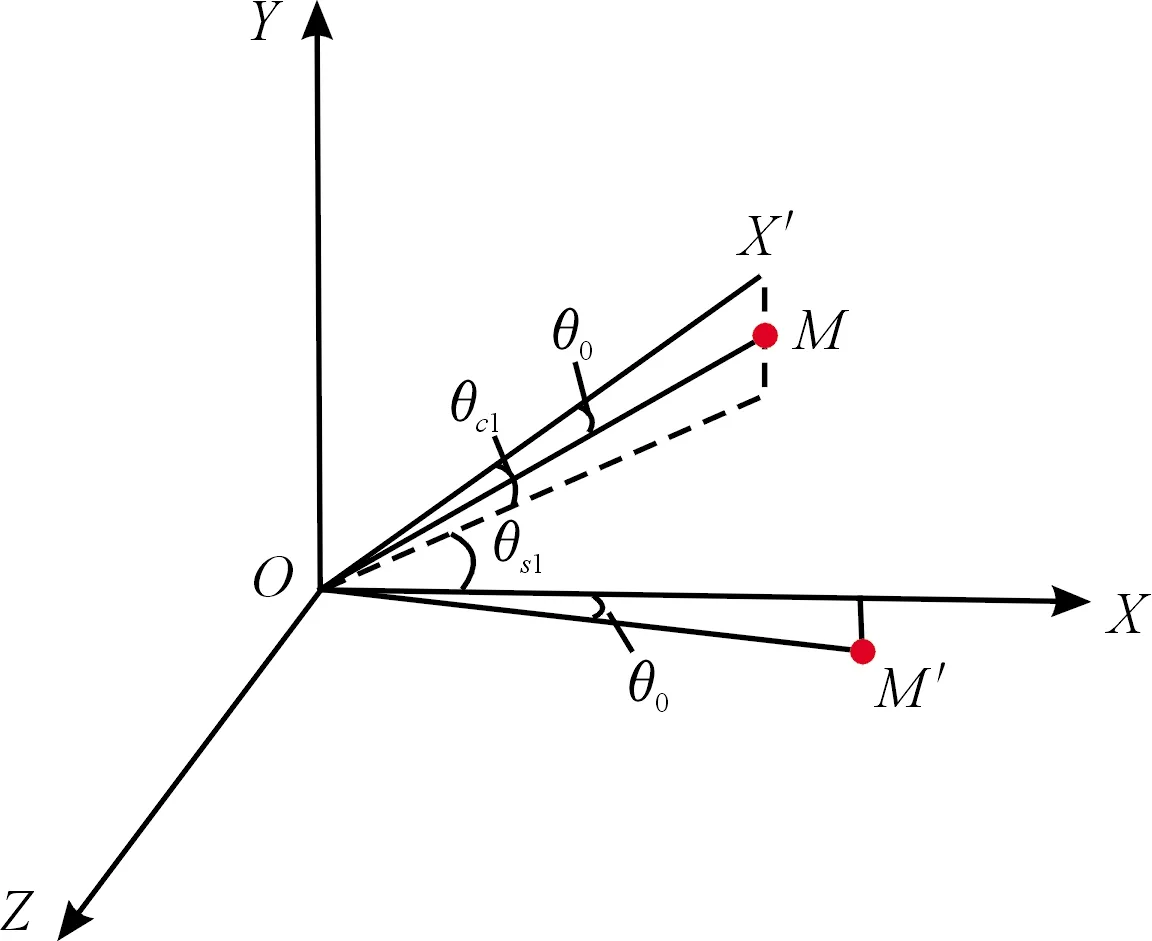
图3 子弹初始位置坐标Fig.3 Coordinates of the initial position of the bullet
考虑狙击步枪膛线赋予子弹高速旋转,有效射程内子弹能平稳飞行,本文只考虑空气阻力、重力和风力对弹丸运动轨迹的影响。
1) 空气阻力。空气阻力与空气的密度、弹丸迎风面的横截面积、飞行速度和阻力系数等因素有关,现实中风速垂直于地表的分量比平行于地面的分量小很多,在忽略垂直风力影响的情况下,表达式为:
(2)

2) 风力影响。弹丸所受风力与风速、弹丸移动速度和弹丸横截面积有关,设定水平面风向角度θ1,Sz、Sc分别为子弹正面和侧面的最大横截面积,Fxf为相对子弹飞行的纵向风力,Fzf为相对子弹飞行的横向风力,其计算公式为:
(3)
结合牛顿第二定律,弹道方程[7]方程简化为:

(4)
式中,vmx、vmy、vmz,分别为子弹X轴、Y轴、Z轴方向速度,m为子弹质量,g为重力加速度。
影响弹道轨迹方程的参数中空气密度、阻力系数、相对风向需要通过相应方程进一步计算。
① 空气密度。空气密度与湿度、大气压力、温度相关[8],设置Rq为空气常数,α为绝对湿度,T为热力学温度。空气密度计算公式为:
ρ=(P-3α/8)/(TRq)
(5)
② 阻力系数。飞行过程中子弹的速度逐步减小,阻力系数[9]与子弹的速度有关。阻力定律给出了阻力系数与物体移动速度的关系,如图4所示。本文研究的狙击步枪有效射程内弹丸的移动速度在420 m/s到840 m/s间,基本在第Ⅲ阶段。
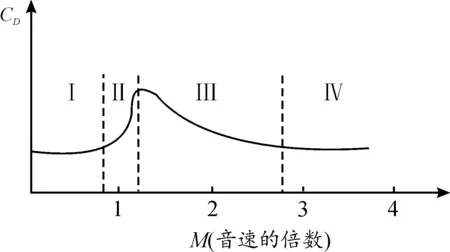
图4 阻力系数与速度的关系曲线Fig.4 Coordinates of the initial position of the bullet
4 算法实现
4.1 弹道解算算法
弹道解算算法的基本方程为弹道解算方程,编写弹道解算代码主要考虑固定参数、变量参数、涉及的方程组、停止迭代运算的位置、输出数据。
以某型狙击步枪为例,该型狙击兵步枪子弹的初速、子弹正面最大横截面积、子弹侧面最大横截面积、子弹质量是固定值,编写弹道解算代码时将这些固定参数直接输入到方程组中。
弹道解算代码涉及的方程组包括子弹起点位置(1)、空气阻力计算方程(2)、风力计算方程(3)、弹道轨迹方程(4)和空气密度计算方程(5)等,将上述方程使用Matlab语言编写代码,形成弹道解算代码。
按照本文弹道解算系统设计方案,影响弹道轨迹的部分参数由探测设备直接测量得到,其中风速、风向由风速风向测量仪测得,高低角度、水平角度由角度仪测得,空气温度、空气湿度由温度湿度测量设备测得,重力加速度由重力仪测得,将以上测量数据作为可变参数输入到代弹道解算代码进行运算,根据代码设定输出对应的结果。
4.2 自动校正算法
定义水平面内坐标原点与命中点E点的距离为射击距离,设由弹道解算代码解算的坐标值为(x5,y5,z5),根据命中点的坐标,当x5≥z5,主要计算Y轴和Z轴的偏移量,在X轴坐标值运算到x5停止迭代运算,定义竖直偏移量为yp,水平偏移量为zp。同理,当x5 以命中点位置坐标x5≥z5时进行说明,此时计算Y轴和Z轴的偏移量。射手在D点进行定位瞄准并扣动扳机射击,此时总偏移量为瞄向D点时弹道解算的偏移量和目标从D处移动至E点处的位移量之和。设D点的坐标为(x4,y4,z4),瞄向D点时弹道解算系统算出子弹在停止迭代运算位置的坐标为(x5,y6,z6),其弹道解算的垂直偏移量为yp=y6-y4,水平偏移量为zp=z6-z4,目标Y轴方向位移量为yw=y5-y4,Z轴方向位移量为zw=z5-z4。则垂直总偏移量为yL=yp-yw,水平总偏移量为zL=zp-zw。 在获得总偏移量和射击距离后,根据弹道密位修正公式进行初始校正,设校正的初始水平角度为θs2,垂直角度为θc2,其计算公式为: (6) 枪支射角调整后,子弹初速度向量、风力向量、与目标的射击距离有变化,其他参数如子弹质量、最大横截面积和重力加速度等保持不变。 1) 初速度向量分析。设定校正后初速度的向量(vx1,vy1,vz1),其计算公式为: (7) 2) 校正后风力分析。枪支射角调整后,子弹所受风力有所改变,设校正后相对子弹正面风力为Fxf1,侧面为Fzf1,其计算公式为: (8) 3) 校正后射击距离。由于目标处于移动状态,射击距离和迭代停止的坐标位置一直在变化,其射击距离和迭代停止坐标由命中点的坐标位置确定。 由于目标处于移动动态,校正后的精度与目标的位移量和弹道的偏移量有关,设校正后子弹在停止迭代运算时的坐标为(x5,y7,z7),其垂直偏移量yxp=y7-y4,水平偏移量zxp=z7-z4。设校正的精度为Φ,当|yxp-yw|<Φ,且|zxp-zw|<Φ时表示校正精度达到要求。 为保证校正后的精度,通过比例调整法[10]调整射角。以调整垂直射角为例,M点为子弹起始位置,MD为校正前瞄准线,垂直射角为θc1,ME为校正后瞄准线,垂直射角为θc2,校正后调整的角度差为:θc=θc2-θc1。校正后有3种情况。 1) |yxp-yw|<Φ时,表示校正精度符合要求,校正有效,射角不需进一步调整。 2)yxp-yw≥Φ时,表示校正角度过大,此时射角由向瞄准线MD方向调整(yxp/yw-1)θc,调整后以新调整的射角代入弹道解算代码计算Y轴偏移量并进一步比对,直到满足精度要求为止。 c)yxp-yw≤-Φ时,表示校正角度过小,此时向瞄准线MD反方向调整(1-yxp/yw)θc,进一步计算Y轴偏移量并进行比对,直到满足精度要求。 校正后弹丸初速度向量、所受风力和目标的位移是一个变化值,需要通过多次迭代计算才能达到射击精度的要求,其算法实现流程如图5。 步骤1:设定精度值。按照3.2节中介绍的狙击步枪射击的精度要求,设定校正精度值Φ。 步骤2:编写代码。将弹道解算方程(4)、密位修正公式(6)、校正后的子弹初速速矢量(7)、受风力矢量(8)、3.2节中停止迭代计算的位置、3.2节中目标位移量、弹道偏移量、精度对比和3.2节中比例调整射角的方程按照Matlab的语言编入到自动校正系统代码中,生成自动校正代码。 步骤3:确定命中点位置和偏移量。由跟踪计算代码和弹道解算代码联合计算出命中点的位置坐标、子弹的偏移量,按照4.2节介绍的步骤计算出总的偏移量。 步骤4:求解校正后的射角。将总的偏移量和射击距离代入到自动校正代码中进行计算,按照4.2节步骤计算出初始校正的水平射角和垂直射角。 步骤5:计算偏移量及精度比对。以调整后的射角为参数,代入到弹道解算算法中,当迭代到停止运算位置时输出校正后的坐标和偏移量。将校正后的偏移量和目标的位移量按4.2节的步骤进行精度比对,满足精度要求时,确定枪支调整的射角。 步骤6:修正射角。当精度不满足要求时,按4.2节中比例调整法步骤修正枪支的射角,重复步骤4和步骤5的动作,直到精度满足要求为止。 步骤7:确定瞄准点位置。确定调整的垂直射角和水平射角后,根据瞄准镜的结构由几何关系计算出瞄准镜上的瞄准点位置,以十字架或红点的形式投影到瞄准镜上,完成瞄准点的校正。 图5 自动校正算法实现流程框图Fig.5 Block diagram of automatic correction algorithm implementation 本文利用Matlab仿真狙击步枪对移动目标进行射击,以某型狙击步枪为例,设置海拔高度2 m,子弹离开枪口初速825 m/s,子弹质量45.8 g,1个标准大气压,空气密度1.29 kg/m3,湿度78%。设置坐标轴的原点在瞄准镜目镜处中心处,枪口与目标水平距离0.8 m,高度0.06 m。设定目标在Y轴坐标点为-3的XOZ平面内移动,起点为坐标点(1 050,-3,20),偏移量的精度值为0.005 m。考虑影响弹道轨迹最主要的因素是风速和风向和环境温度,重点研究2种温度下不同风速风向下的狙击步枪修正的瞄准点位置,设定温度分别在20 ℃和40 ℃,目标以45 m/s 45°方向匀速直线运动和初始速度为25 m/s 90°方向Z轴方向加速度为1 m/s运动的目标进行仿真打靶。 为验证自动校正系统的精确程度,对狙击步枪分别采用直接瞄准、使用分化板瞄准和校正后的瞄准点瞄准目标进行说明,由于在温度20 ℃和40 ℃时子弹运动轨迹相差较小,只列举在20 ℃的曲线,如图6所示,图中A点为直接瞄准目标时的瞄准点,B点为使用分化板瞄准时的瞄准点,C点为对匀速运动射击校正后的瞄准点,D点为对匀加速运动射击校正后的瞄准点。 图6 瞄准点位置投影图Fig.6 The projection diagram of the aiming point 图7、图8显示了直接瞄向目标时弹道轨迹、使用分化板瞄准时弹道轨迹、经校正系统校正后的弹道轨迹。从图中可以看出,直接瞄向目标的弹道轨迹与目标移动轨迹最近距离相距最远,这是因为直接瞄向目标时弹道轨迹有较大偏移量,弹道的偏移量越大两者轨迹相距越大;使用分化板瞄准目标时弹道轨迹与目标轨迹存在一定间隔,这是由目标的移动量和受风力影响的偏移量造成的;经校正系统校正后的弹道轨迹与目标轨迹最近距离极小,其最近距离大小与校正精度有关,说明自动校正系统能根据目标的移动状态,计算枪支需要调整的射角,使子弹精确击中目标。 图7 匀速运动时射击仿真曲线Fig.7 Shooting simulation curve during constant speed motion 图8 匀加速运动时射击仿真曲线Fig.8 Shooting simulation curve during uniform acceleration motion 1) 自动校正算法能正确校正枪支调整的射角,实现精确命中移动目标。 2) 为狙击步枪装配能对移动目标自动校正的瞄准镜,能有效对移动目标进行精确打击,可为新一代狙击步枪瞄准镜的研发与设计提供参考。

4.3 自动校正算法实现
5 仿真分析


6 结论
