四旋翼飞行器姿态控制研究
2022-01-11郭康傅强张先浩罗钟梅
郭康,傅强,张先浩,罗钟梅
(中国民航飞行学院,广汉 618307)
0 引言
在第二次世界大战结束后,科学技术取得了巨大的进步,旋翼飞行器等相关领域的技术也取得了长足的发展。截至今日,旋翼飞行器已经研发出了上百种,应用领域越来越广泛。民用上,人们已经可以利用旋翼飞行器在空中飞行时产生的气流对农作物喷洒农药、利用旋翼飞行器在空中飞行时的广阔视角进行航拍、利用旋翼飞行器体积小、灵活的优势远距离运输各类商品等。2016 年4 月的一个上午,在江苏某仓储公司的储存罐区交换泵房内,工作人员由于违规使用电焊而引发火灾,导致附近的两个储油罐燃烧了起来,火势非常地猛烈,燃烧地面积非常大,火灾的周围还有很多油品储罐和化学危险品储罐等高危化工品,形势十分紧迫。当天,大疆创新的代理商常州赛思迅速完成了设备整备和人员集结,并且携带三架配备有相机的飞行器,在火灾上空进行实时拍摄,通过飞行器携带的相机透过浓烟从空中获取全景,准确传达火警信息,对下一步的救援行动起到了很大的帮助。军用上,旋翼飞行器已经成为大多数国家信息化作战必不可少的装备,它为人类开启了智能远程攻击武器主导的新篇章。挪威prox dynamics公司设计的“黑熊蜂”飞机重约16 g,体积非常小,人们可以把它装进口袋,非常地方便。而且,飞行器的电机在飞行的时候几乎不产生噪音,可以飞行25 分钟,向1 km 以外的军人传递其所拍摄的图像和视频。这样,口袋飞行器有利于侦查任务的隐蔽性,能很好地完成任务。
根据首届中国通用航空适航认证发展论坛,截至2019 年5 月26 日,中国共有1353 家飞机制造商,注册飞机330034 架,注册用户310218 架,表明中国飞机工业的发展趋势越来越好,市场的规模在不断扩大[1]。根据美国航空协会网站的报告,截至2018年1月19日,美国联邦航空局注册的无人机数量超过100 万架。可以看出,无论是在国内还是国外,无人机的发展规模都在不断扩大,未来将发挥更加重要的作用。
四旋翼飞行器是不以载人为目的的航空器,其外表呈现出碟的形状,属于非共轴式的飞行器[2]。同传统飞行器比较,四旋翼飞行器有着独特的特点:
(1)在操作控制方面,四旋翼飞行器构造十分精巧,人们可以操作四旋翼飞行器轻易地实现垂直的升起和降落运动。
(2)在机动性方面,四旋翼飞行器非常灵活[3]。
(3)在安全性方面,四旋翼飞行器的隐蔽性很好。
针对四旋翼飞行器的研究中,通过LQR 和预测控制的多种变量进行多种变量来进行姿态控制,实现了解耦能力的提升,但是运算起来比较复杂,而通过调制合适的PID 参数,设计出控制能力较好的PID 控制器,有利于提升四旋翼飞行器控制平衡的能力[4,5]。
1 四旋翼飞行器的动力学模型
1.1 坐标系的建立
在理想情况下,四旋翼动力学分析中常用的坐标系是机体坐标系Fb=(O,Xb,Yb,Zb)与地面坐标系F=(O,X,Y,Z)[6]。
当固定在航空器建立三维空间坐标系的时候,由于四旋翼飞行器四个旋翼之间的作用是相同的,所以可以把飞行器的质心作为飞行器的原点,然后选定四个旋翼中任一旋翼的机臂的方向作为X轴的方向,再逆时针选定与这个机臂呈90°垂直的另一个旋翼机臂作为Y轴的方向,最后选定与这个两个机臂形成的面呈垂直向上的方向作为Z轴的方向。
为了便于了解和控制四旋翼飞行器的飞行状态,可以在建立的坐标系基础下给出如下三个角的定义:
(1)滚转角φ:OY与在YOZ平面的投影之间的夹角。
(2)俯仰角θ:OZ与在XOZ平面的投影之间的夹角[7]。
(3)偏航角ψ:OX与在XOY平面的投影之间的夹角。
1.2 动力学模型建立
通过采用牛顿欧拉动力学和质心运动的相关理论、公式,可以推导出来四旋翼飞行器的动力学模型[8]:
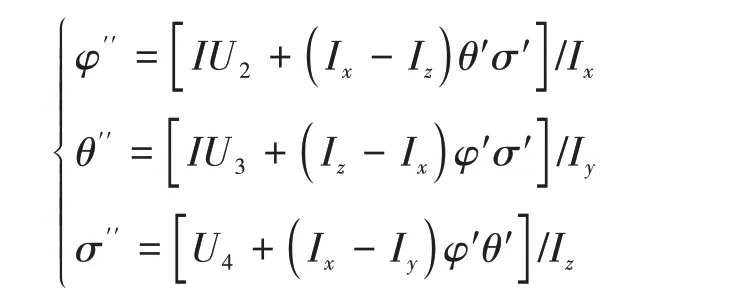
其中,Ix,Iy,Iz作为四旋翼飞行器在三维空间机体坐标系下的转动惯量,U1,U2,U3,U4作为四旋翼飞行器的控制量。
1.3 PID控制器
PID 控制器又称比例积分-微分控制器,由比例、积分和微分三部分组成,PID 控制是工业控制应用中反馈回路的一个常见组成部分。控制器将收集到的数据与参考值进行比较,并使用差值计算新的输入值,以达到或维持系统数据的参考值[9]。PID控制器可以根据历史数据和不同的发生率,通过各种控制操作使用其他简单的控制来改变输入值,使系统更加准确和稳定,比例控制室、积分控制室、差动控制室相互关联,三个参数可以单独调整,也可以使用一两个控制规则[10]。也就是说,PID控制器中各个环节的作用如下:
(1)比例控制。比例控制是最简单的控制方法之一。控制器的输出与输入误差信号成比例。只有比例控制可用时的系统输出存在稳态偏差。比例链路可以快速减小误差,加快响应速度。
(2)积分控制。在积分控制中,控制器输出与输入误差信号的积分成正比。积分项的误差取决于时间积分。随着时间的推移,积分项会增加。因此,即使误差很小,积分项也会随时间增加,从而增加控制器的输出并使稳态误差更为零。
(3)差速控制。在控制器中引入比例项通常是不够的。比例项的作用只是放大偏差的大小。这种差异使您可以预测错误变化的趋势和错误变化的趋势。抑制误差的控制效果预先为零甚至为负,以避免控制量的严重超调。如果差分链路过大,系统的抗干扰能力将显着降低。合理的差分链路可以加快系统速度,减少调谐时间,减少系统过冲。
2 实验分析
我们可以把PID控制简单地看成比例、积分和微分线性化地组合在一起,PID控制器的控制系统的性能可以依靠响应时间、超调范围和积累的稳态误差作为判别的指标,我们不考虑环境因素和硬件因素,对PID 控制器的比例参数,积分参数,还有微分参数不断地调整和优化,精确地调节,保证系统到达我们想要调节的最佳稳定状态。
利用MATLAB中的Simulink进行建模、仿真,根据系统框图,划分各个子系统,在模块库中拖拽所需要的模块并进行连接,然后给各个模块设置好所需要的参数,保存模型,进行仿真;最后不断调试参数,直到结果符合要求。

表1 四旋翼模型的参数
然后可以利用模块化的流程,构造出流程图,输入各个变量,进行仿真,通过改变比例、积分、微分的参数,验证控制算法的可行性,利用Simulink 仿真平台搭建的姿态控制器的模型如图1所示。

图1 姿态控制器的模型
通过对四旋翼飞行器所受力曲线图的观察,我们可以发现这四个力的曲线趋势有着差异,但是它们最终的趋势都是2.94,也就是我们所给定的重力mg的四分之一,这说明在飞行器姿态保持稳定的时候,四旋翼飞行器每个旋翼作用在飞行器上的升力值为重力值的四分之一,结果如图2所示。

图2 升力F3变化曲线
四旋翼飞行器的稳定飞行需要保证姿态角的稳定控制,在仿真软件中对四旋翼飞行器的姿态角给予指令,翻滚角=0.1°,俯仰角=0.2°,偏航角= 0.3°,在t= 0 这一时刻分别给翻滚角、俯仰角、偏航角阶跃指令信号,仿真时间定为10 s,最后得到如图3所示的结果。

图3 翻滚角变化曲线
通过上面的翻滚角在PID 控制器下的曲线,我们可以发现姿态角都能够在几秒内完全进入稳态,最终趋近于我们的给定状态—零,这说明PID控制器对阶跃信号指令的静态跟踪良好。
3 结语
在新时代的快速发展后,飞行器正在进入大家的视野,在日常生活中不断地发挥出其巨大的作用,而四旋翼飞行器在飞行器中有着其独特的优势与地位。因此,四旋翼飞行器的研究前景十分光明,对四旋翼飞行器的研究有很大的实用价值。
本文对四旋翼飞行器进行了一定的研究,对四旋翼飞行器的相关发展起到一定的帮助。但是,还有许多的问题没有能够研究学习,PID 控制器的控制参数也可以进一步进行优化,我认为本文还可以从以下几个方面进行修正:首先,在动力学建模的时候,忽略了很多因素,应该可以逐步把这些参数添加进去进行更为仔细的研究;其次,仿真验证的时候,可以更为精确地调整PID 控制器的参数,得到更为准确、形象的曲线图。
