基于Matlab/Simulink的牵引供电系统能耗分布规律分析
2022-01-10张雄飞
安 秘,张雄飞
0 引言
截至2020年底,全国铁路营运里程达14.63万公里,其中电气化铁路10.65万公里,高速铁路3.79万公里。预计到2030年,我国高速铁路规模将增长至4.5万公里[1]。电气化铁路的快速发展一方面方便了人们的出行,另一方面其巨大的能耗问题也引起了广泛的关注。电气化铁路作为电力系统的重要用户,2017年消耗电能1 239.19亿千瓦时,约占全国总用电量的2%。然而,在牵引供电系统能量传输过程中,变压器、输电线路等设备消耗了大量电能,因此迫切需要推导出牵引供电系统的能量传输规律,揭示牵引供电系统的能耗特性,为制订高效的节能方案提供参考。
针对高速铁路能耗分布规律问题,可采用数学模型法和仿真模型法。由于数学模型缺乏动态性能,且模糊潮流计算精度不高,因此,基于仿真模型的方法更适合于本问题的研究。
目前,国内外学者大多利用仿真模型对地铁能耗进行分析。文献[2]通过建立地铁仿真模型,将实测能耗与仿真计算数据进行对比;文献[3,4]研究了地铁再生能源利用;文献[5]根据地铁仿真模 型和牵引特性曲线提出了一些节能措施。然而,基于仿真模型对高速动车组进行能耗分析的研究却很少。此外,多数文献[6,7]在分析中将高速动车组牵引传动系统简化为电阻或谐波源,未能很好地表征高速列车的动态电气性能。
本文采用基于仿真模型的方法研究高速铁路牵引供电能耗分布规律,根据牵引供电系统拓扑结构建立牵引网模型;分析高速动车组工作原理,并推导整流器、逆变器和牵引电机的控制策略;基于Matlab/Simulink软件平台建立车-网耦合模型,对系统能耗分布规律进行分析,并提出针对性的节能措施。
1 牵引供电系统能量流动路径分析
1.1 牵引供电系统建模
全并联AT牵引供电系统具有输入阻抗小、对通信干扰小、供电距离长、损耗低等优点,在高速铁路中得到广泛应用。全并联AT供电结构主要由牵引变电所(AT变压器)、分区所、牵引网(含承力索、接触线、附加线、钢轨等)和高速动车组组成,其典型拓扑如图1所示。

图1 全并联AT供电结构
牵引变电所将110/220 kV三相交流电转换为27.5/55 kV单相电。牵引变电所的主要设备是牵引变压器和架空馈线或电缆,由于V/x接线牵引变压器具有容量利用率高、结构简单等优点,在高速铁路中得到广泛应用。
1.2 能量流动路径
根据牵引供电系统的拓扑结构,电能传输路径如图2所示。在牵引工况时,牵引供电系统从110/220 kV电力系统吸收电能,部分由牵引变压器和馈线消耗,剩余电能流向牵引网,经接触线传输后,高速动车组从接触线获得电能,大部分转化为牵引电机动能,从而驱动高速动车组运行,其余电能由辅助绕组和牵引传动系统(包括车载变压器、整流器、感应电动机、逆变器)消耗。

图2 电能传输路径
当高速动车组处于再生制动工况时,牵引电机工作在发电机状态,将动车组多余的动能转换为电能,经牵引传动系统后反馈至牵引网,最终返送回电力系统。
图2中各系统可以简化为图3所示的等效电路模型。其中,ZS为牵引变电所等效阻抗,ZN为牵引网等效阻抗,ZT为牵引传动系统等效阻抗,i为电流,uS、uN、uT分别为ZS、ZN、ZT的电压。因此,整个系统的能量损失为

图3 牵引供电系统等效电路

式中:WS为牵引变电所能耗;WN为牵引网能耗;WT为牵引传动系统能耗。WS、WN可以通过式(2)和式(3)求得:

式中:cosφS、cosφN分别为牵引变电所和牵引网等效阻抗的功率因数。下一节将详细推导牵引传动系统能耗WT的计算模型。
2 牵引传动系统建模
高速动车组受电弓从牵引网吸收电能并输送至车载变压器,经车载变压器降压,整流器转换为直流电,逆变器再将其转换为可调压调频的交流电后,驱使牵引电机转动。忽略辅助绕组的损耗,高速动车组牵引传动系统可以简化为图4所示的电路。图中,ZOT、ZR、ZI分别为车载变压器、整流器、逆变器的等效电阻,uOT、uR、uI分别为对应的电压。

图4 牵引传动系统等效电路
由图4可以看出,牵引传动系统的能耗由4部分组成:

式中:WT为动车组从牵引供电系统吸收的电能;WOT、WR、WI分别为车载变压器、整流器、逆变器的能耗,可由式(5)~式(7)计算:

式中:cosφOT、cosφR、cosφI分别为ZOT、ZR、ZI的功率因数。此外,WOT可由车载变压器的铭牌参数求得,而WR和WI的取值与整流器和逆变器的控制策略有关。WM为最终传递给牵引电机的电能,可由式(8)求得:

式中:Te为牵引电机的输出转矩;ω0为牵引电机的旋转角速度。
2.1 四象限变流器
为基于Simulink仿真模型分析动态能量损耗分布规律,需要对整流器、逆变器和电机的控制策略建模,并对控制策略进行分析。
牵引传动系统整流器为四象限变流器,用于为中间直流环节提供稳定的直流电压,并使得网侧电压和电流保持单位功率因数。基于上述控制目标,整流器采用图5所示的瞬态电流控制策略。

图5 整流器控制框图
瞬态电流控制采用电压电流双闭环控制,其中,电压外环用于保持直流侧电压的稳定,电流内环用于实现网侧电压电流功率因数。瞬态电流控制表达式如下:

式中:Udc和idc分别为中间直流环节电压和电流;为调制信号;Kvp、Kvi、Kip为PI控制器参数;为中间直流环节电压期望值;*smI为网侧电流期望值;为中间直流电压期望值;us为输入电压瞬时值;R为等效电阻;ω为网侧电流角频率;L为电感。
在图5所示的电流环模块中,交流侧电感电流通过PI控制器调节调制电压uab,从而实现网侧电压电流同相位。其中,用于增加系统响应速度。
为了减小波形失真并提高系统的动态性能,电压外环采用如图5模块(2)所示的PI控制。为降低电压外环PI控制器负荷,将Ism1和Ism2求和后作为网侧电流期望值。
2.2 逆变器和牵引电机
对逆变器和牵引电机建模时,通常将两者视为一个整体。通过间接转子磁链定向和坐标变换,实现牵引电机磁场和转矩解耦,从而将交流电机模型等效为直流电机,获得较好的调速性能。基于上述分析,为实现牵引电机的变频调速,高速动车组常采用矢量控制的方法,其控制框图如图6所示。
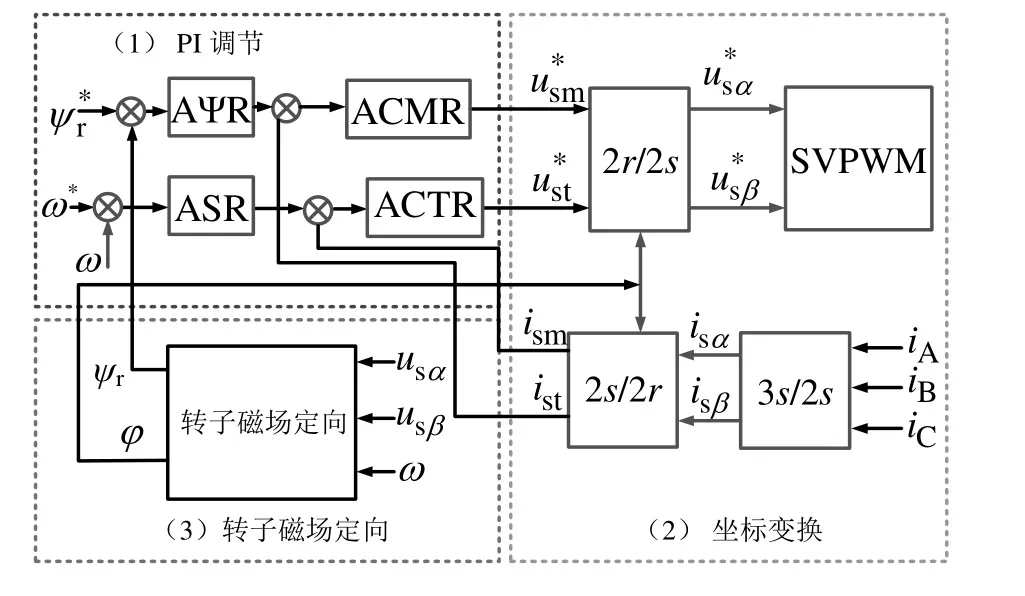
图6 逆变器和电机控制框图
在图6模块(1)中,AΨR、ASR、ACTR和ACMR分别为磁通、转速、转矩和定子电流励磁调节器,均采用PI控制器。
为实现磁场和转矩解耦,需要将电机数学模型从三相静止坐标系变换到两相旋转坐标系,根据磁势平衡原理,可以推导得到三相静止坐标系到两相静止坐标系的变换矩阵:

同理,两相静止坐标系到两相旋转坐标系的变换矩阵如下:

准确且快速的转子磁链定向可以为坐标变换和PI调节提供控制所需的转子磁链幅值和相角,计算准确度直接决定了系统的性能。根据牵引电机数学模型,采用电压模型法进行转子磁场定性,即通过检测容易测量的定子电流和电压来计算转子磁链的幅值和相位,表达式为 式中:Ls和Rs为定子电感和阻抗;Lr为转子电感;Lm为互感;usα和isα为定子电压和电流瞬时值在α轴的分量;usβ和isβ为定子电压和电流瞬时值在β轴的分量;σ =;p为微分算子。

3 仿真及验证
3.1 系统建模
基于Matlab/Simulink软件平台,结合牵引供电系统中主要电气设备的拓扑结构和控制策略,搭建如图7所示的仿真模型,其中,整流器、逆变器的仿真控制框图如图8所示。表1和表2分别列出了牵引供电系统和牵引传动系统主要设备的详细仿真参数。

图7 仿真模型
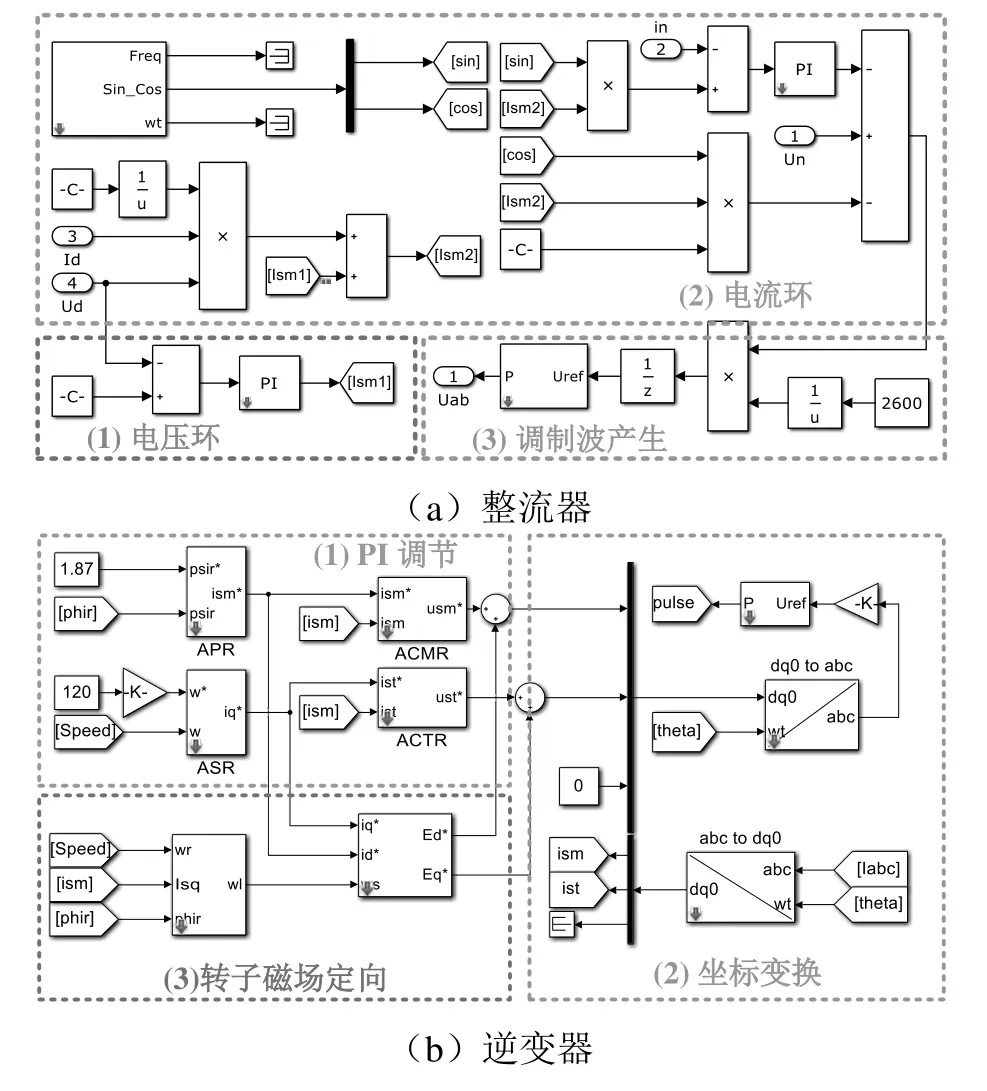
图8 整流器及逆变器控制框图

表1 牵引供电系统仿真参数

表2 牵引传动系统仿真参数
3.2 模型验证
为验证所搭建仿真模型的正确性,设置仿真条件(表3),得到的仿真结果如图9所示。
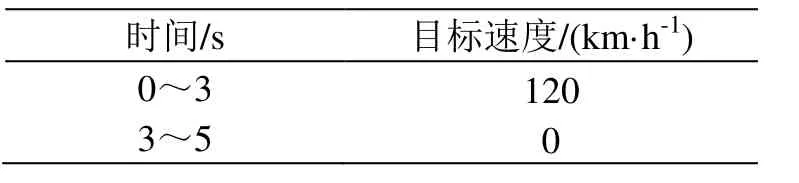
表3 仿真条件
从图9的仿真结果可以看出:无论在牵引工况还是制动工况,网侧电压和电流始终保持单位功率因数;在牵引工况和制动工况相互转换时,中间直流侧电压均保持稳定;高速动车组在速度达到期望值前,其有功能耗不断上升,进入制动工况后,多余的电能被返送回电力系统。


图9 仿真结果
综上所述,仿真结果与理论分析较为接近,该模型能够满足实际需求,可基于此进行进一步的能耗分布规律分析。
3.3 能耗分布规律分析
通过获取不同设备的瞬时电流值和电压值,由式(1)~式(8)可计算各主要电气环节的能耗,从而实现对整个牵引供电系统能量消耗分布情况的动态分析和评估。根据车-网耦合仿真模型拓扑结构,选取图10中的6个节点进行电能测量。

图10 仿真模型电能测量节点
设置仿真参数如表4所示,根据仿真结果可以得到整个系统的能量分布情况如图11所示。

图11 能耗分布情况

表4 仿真参数
根据仿真结果,牵引供电系统所消耗的能量约占总能耗的2.5%,其中牵引变电所和牵引网能耗占比分别为1.4%、1.1%。
对于牵引传动系统,车载变压器、整流器和逆变器分别消耗约4%、5%、1%的能量(占比计算以传输到牵引传动系统的能量为基准)。此外,从牵引网获得的电能约90%可转换为高速动车组动能,其中约18%为制动能量,经牵引传动系统和牵引网传输后,约15%的电能作为再生能量返送回电力系统,实现二次利用。
为了研究目标转速、负载转矩和牵引变压器容量对能耗分布规律的影响,设置仿真条件(表5)进行分析。

表5 仿真条件
仿真结果表明,动车组目标速度对能耗分布影响不大,不同目标速度下各系统装置的能量消耗与图11基本一致。然而,负载转矩变化会对牵引传动系统的能耗分布产生较大的影响。当负载转矩为零时,车载变压器、整流器和逆变器分别消耗约12%、12%、1%的能量,只有约75%的能量可传递给牵引电机,能量利用率较低。当负载转矩设定为100 N·m时,约87%的能量可传递给牵引电机,略低于负载转矩为250 N·m时的情况。牵引变压器容量也是影响能耗分布的关键因素之一,当容量降至 1 530 kV·A时,牵引变电所消耗约2%的电量,而当容量增至4 590 kV·A时,牵引变电所能耗占比达到7%。
3.4 节能建议
根据上述分析,提出以下几点节能降耗建议:
(1)从仿真结果可以看出,变压器容量对能耗分布有重要影响,应设计合理的变压器容量。
(2)为降低损耗,可采用节能型变压器,有助于减少空载损耗、优化电能质量,使谐波和无功功率引起的损耗得以降低。
(3)由于高速动车组空载或轻载时能量传递效率低,应尽可能避免此种运行工况。
(4)迫切需要制定更好的再生制动能量回收利用方案,如将电能返送至牵引供电系统10 kV侧电网供站内照明等设备使用,或装设大容量超级电容、蓄电池等储能装置等。
4 结语
本文提出基于Matlab/Simulink仿真模型对牵引供电系统能耗分布规律进行分析的方法。根据牵引供电系统拓扑结构和工作机理,分析了牵引供电系统的能量分布和计算方法;推导了牵引传动系统整流器、逆变器和牵引电机的控制策略,建立了车-网耦合模型,并基于Matlab/Simulink软件平台进行了仿真验证。结果表明:牵引变电所和牵引网的能量损耗约占总能耗的2.5%;牵引传动系统所消耗的能量约90%可以转化为牵引电机动能,再生制动能量反馈电网比例约为15%。此外,还分析了目标转速、负载转矩和牵引变压器容量对能耗分布的影响,并提出了针对性的节能建议。
