基于PID控制的医疗废物自动收集系统研究
2022-01-10江祎珑陈维娜谢天豪戴众兴丁豪杰胡兴柳
江祎珑,陈维娜,谢天豪,戴众兴,丁豪杰,胡兴柳
(金陵科技学院 智能科学与控制工程学院,江苏 南京 211169)
0 引言
医疗废物桶是指装有医疗机构在医疗过程中、预防保健以及其他医疗相关的活动中产生的具有传染性、毒性或者其他危害性的废物容器。医疗废物共分5类,具体可以参见《国家危险废物名录》[1-3]。
现有的医疗废物箱很少具有智能的自动装车等功能,在装车过程中需要大量使用人力和物力。在新冠疫情期间,这样的危害尤其突出,处置不当很容易由于接触传染源而影响自身健康,进而造成二次传染[4-5]。同时由于相关医疗物品使用量剧增,如何妥善处置这些废物,也给医疗工作带来了严峻的考验。近年来,随着“互联网+”时代的快速发展,现代社会已经发展成为一个数据信息的时代,需要提升医疗服务的智能化和信息化水平,因此更为安全的医疗操作流程逐渐被人们所推崇[6-7]。
为了克服现有废物箱没有自动装车定位等功能的缺点,本文开发了一种自动装车式医用废物箱,通过对机械臂和智能废物收集车的组合,实现医用废物的自动收集系统的模拟。该系统以自动化技术为基础,通过综合运用各类传感器,结合通信网络,从而达到智能回收医疗废物的目的。该系统综合运用了自动控制技术,同时为医学自动化领域研究做铺垫[8-9]。
1 系统结构组成
医疗废物自动收集系统可以帮助医疗工作者回收医用垃圾时避免直接接触。以红、绿、蓝三色方块为例,作为待回收的垃圾桶,机械车需实现定点停车,并使用机械臂将通过红外传感器检测单的物块按颜色装入车体,完成操作后继续行驶寻找下一目标。系统如图1所示。平台的硬件部分包括:医用废物车、智能传感装置、机械手以及医疗废物箱等多个部分。
硬件系统以废物收集车作为平台,车体可以移动并实现远程控制机械臂。硬件平台的控制系统采用的是STM32处理器,作为主控系统,它负责控制车体的电机和舵机的运行。本系统还采用ARM9处理器处理语音信息指令并监测车体周围状态和环境。当使用者发出语音命令后,通过手机App经过网络传输送入处理器内部,处理器进行语音识别,并进行指令翻译。翻译完成后,处理器将指令传送给STM32单片机再转换为机器指令,从而实现机械臂和废物收集车的控制。系统由手机App上位机远程控制部分和机械臂废物收集车两部分组成,如图2所示。

图2 系统结构组成
控制板包括两个部分:基础板(见图3);Arduino板和STM32板。控制板的正常工作电压在6.4~8.4 V,供电采用的是AD/DC电源适配器,当电压低于6.4 V时,蜂鸣器会发出报警信号,提醒使用者充电。
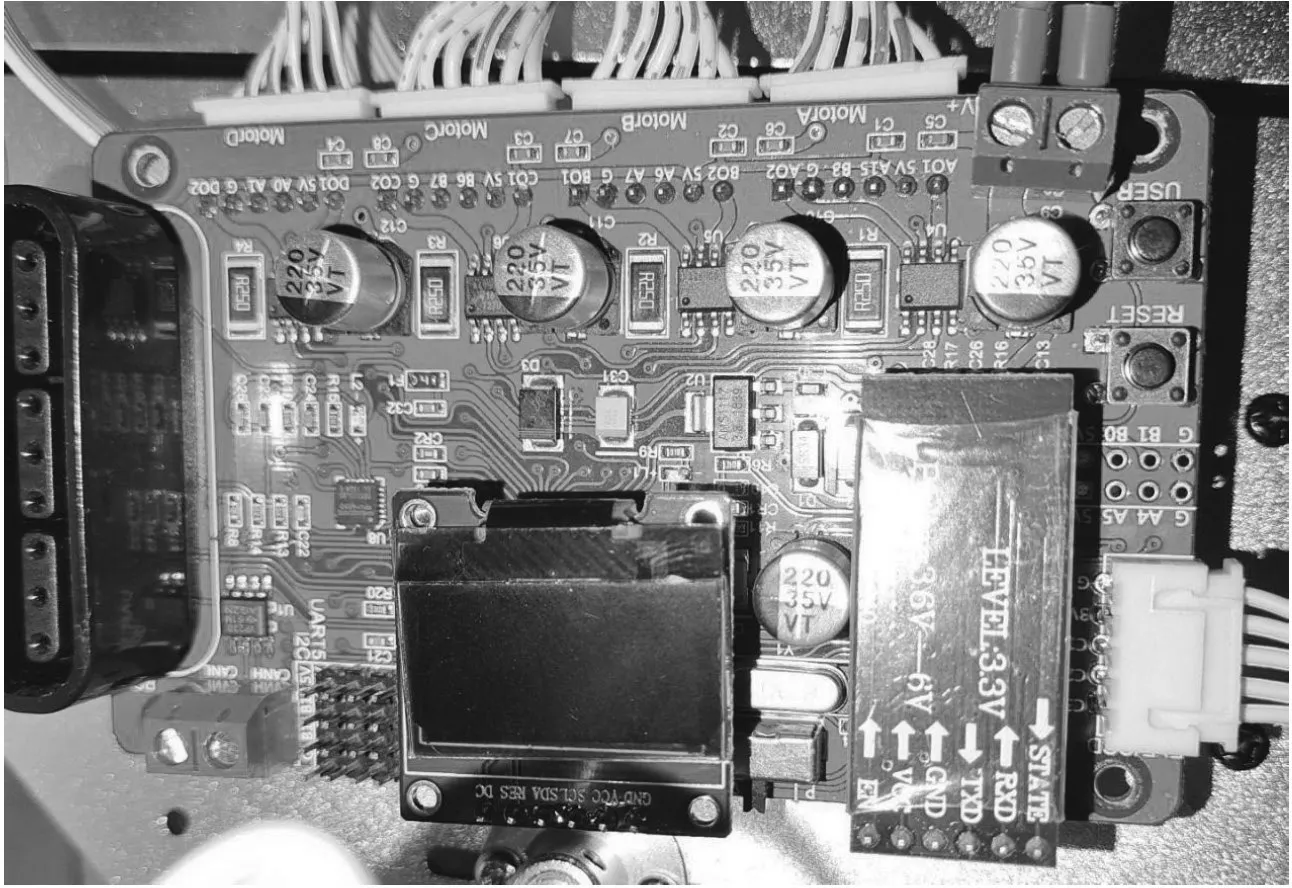
图3 智能废物收集车控制板
控制板上的USB接口供调试使用。总线接口与舵机相接,信号接收器端口与手柄信号接收器相接,使用者可通过手柄控制机械臂。中间的3.3 V,5 V端口是控制板给外接设备提供的电压值。蓝牙接口可接蓝牙通信设备,然后通过手机连接控制机械臂。
2 系统控制算法
2.1 机械手臂控制算法
废物收集车平台是所有硬件搭建的基础,因此需要该平台具有自动调节能力,因此该系统选择了最便捷的PID控制算法[10-11]。机械臂控制板如图4所示。
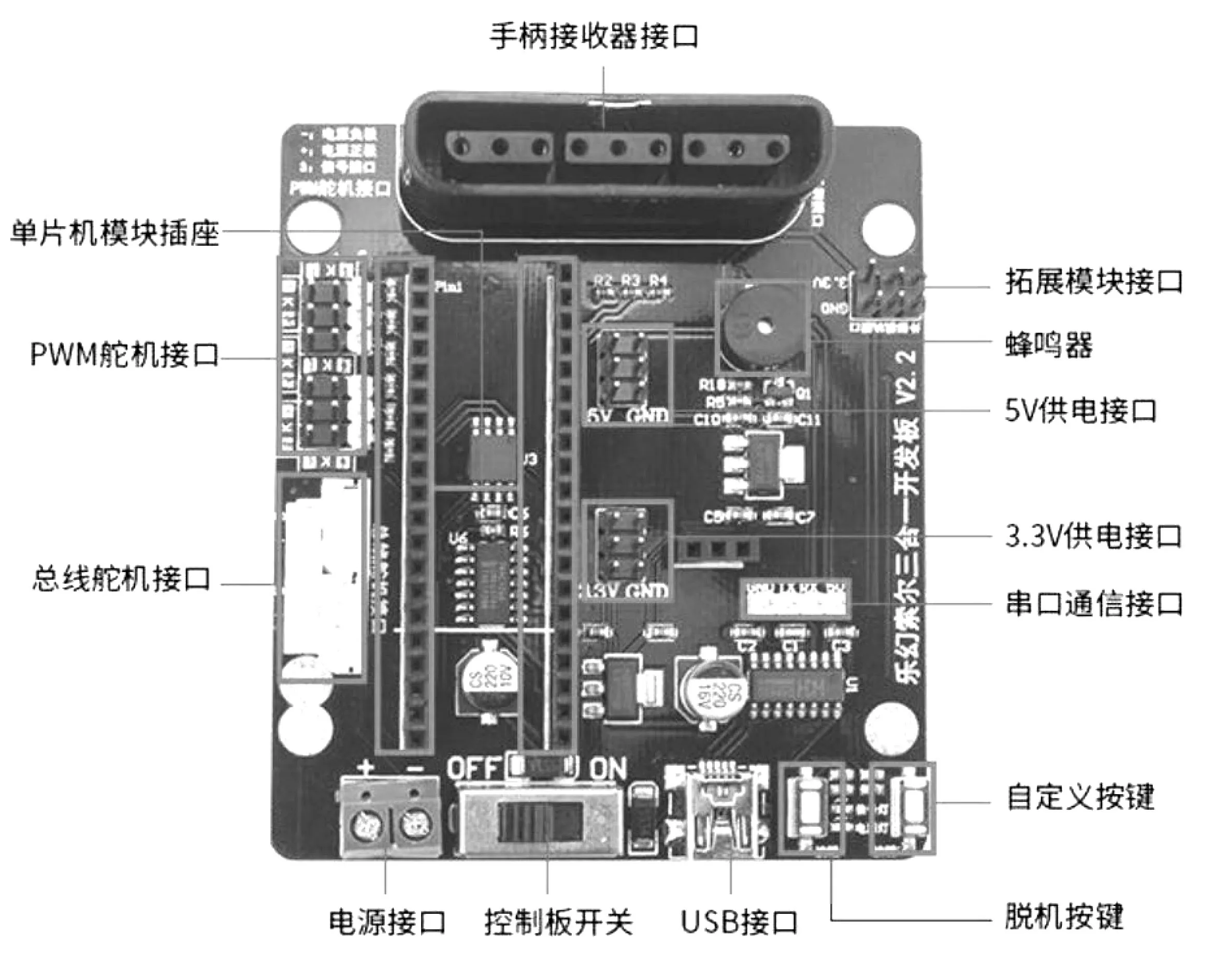
图4 机械臂控制板
PID调节是闭环自主控制调节,采用的控制方式分为模拟控制和数字控制。由于本系统是使用数字信号进行控制,因此,属于数字PID控制范畴。数字PID控制包含很多方式,需要结合考虑系统参数进行确定。由于医疗废物收集车的移动速度不会太快,硬件本身稳定性比较好,因此这里采用了增量式PID算法。
舵机是决定机械臂性能的重要因素之一。本系统中的舵机是用STM32单片机中的PWM信号进行控制的,根据PWM信号的空占比来改变舵机转轴的位置。
机械手臂实现的流程如图5所示,第一步,进行程序初始化,机器自检和部件复位;第二步,控制模块同时输出多个电机脉冲信号及方向信号,驱动机械臂运动至指定位置;第三步控制执行末端获取医疗废物;第四步是通过机械手臂将医疗废物放至指定位置;第五步,运行结束后整机复位。

图5 机械臂实现流程
2.2 环境感知模块设计
环境感知模块使用的是红外传感器,其测距范围是10~80 cm,是由一个红外发射管和一个位置敏感检测装置以及相应的计算电路构成。
通过AD采样试验,发现AD采样值与红外传感器测量的距离关系如图6所示。从图6中可以看出测量距离与采样值之间成反比关系,而测量距离则与采样值成正比关系,因此需要对其进行线性化处理。
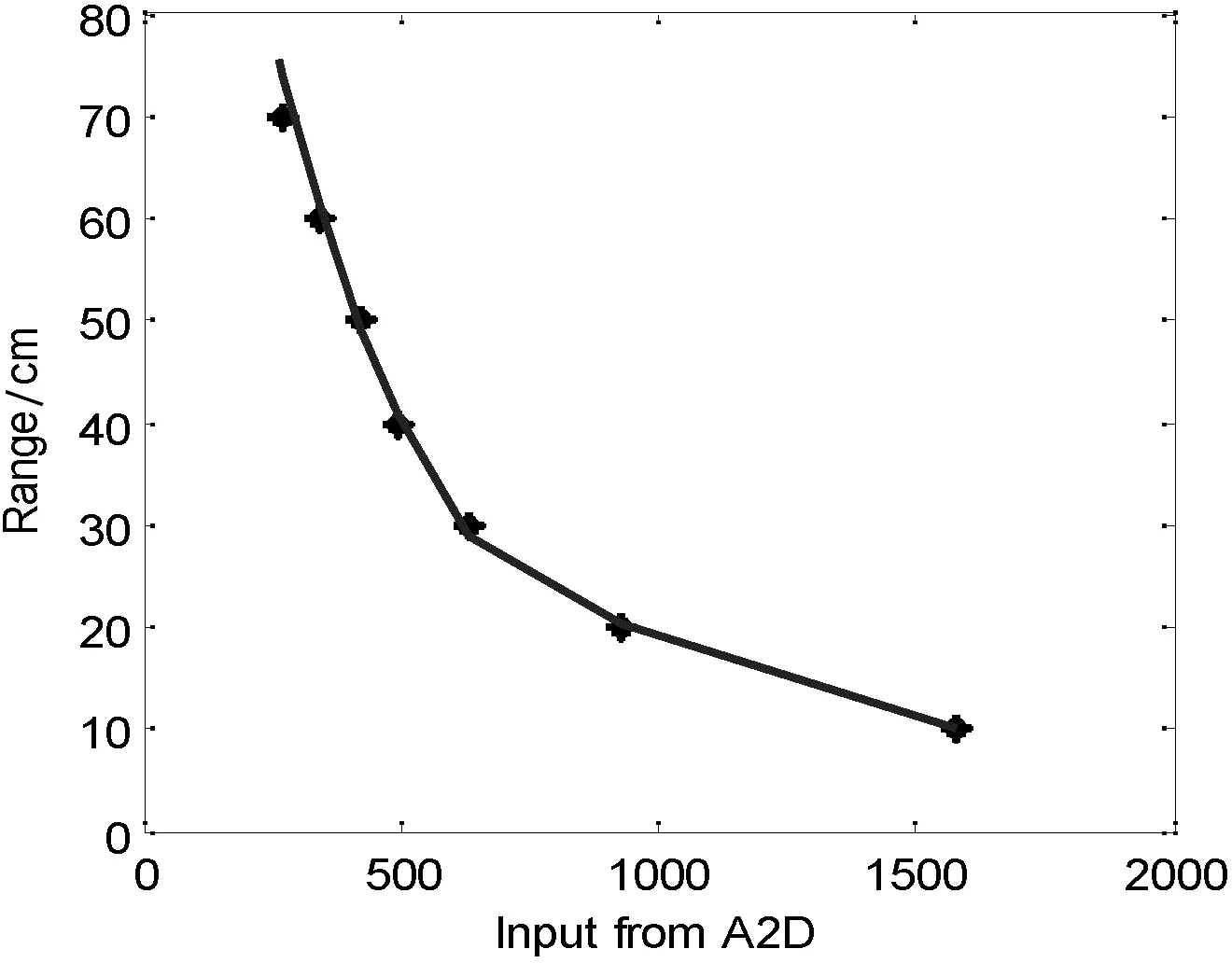
图6 AD采样值与测量距离的关系

表1 红外测距模块线性化后测试结果(单位:cm)
2.3 无线远程通信
本系统利用蓝牙网络来实现远程通信,由手机App接收指令信息并通过网络发送给STM32处理器,处理器再将机械臂周围的环境状态通过网络返回给使用者。
系统在默认模式下,废物收集车接收蓝牙遥控指令,如果要其他的设备通过串口对收集车进行控制,需要先使用能串口控制端。如果使用遥控模式,收集车将接遥控指令。
2.4 伺服电机控制
废物收集车行走是依靠车体左右两边的两个伺服电机。与普通电机的工作原理不同,伺服电机的动力来源于不同频率的脉冲。如图7所示,当分别给定1.3 ms,1.5 ms,1.7 ms的脉冲时,电机进行正转、静止和反转3种状态。

图7 伺服电机的工作脉冲
不同频率的脉冲是由单片机处理器给出的。废物收集车的转弯即通过一个伺服电机转动,另一个电机不转或者反转实现的。
3 系统调试与实验结果
两个步进电机分别驱动两个车轮,设为主动轮,通过控制电机的转速和转向,以实现废物收集车的前进、后退、转弯等动作;两个万向轮为从动轮,保持车身平衡和辅助转弯。其中,使用3种不同特征的物块来代替不同类型的医疗废物进行拾取测试(见图8)。
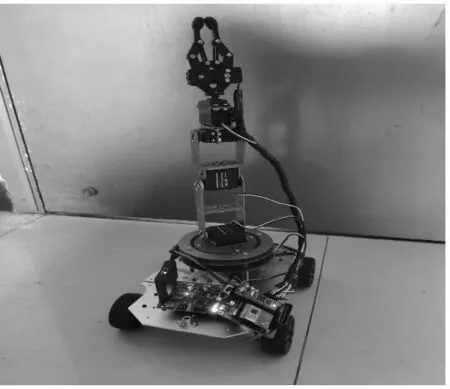
图8 系统调试
如表2所示,拾取物块2的成功率明显小于拾取物块1和物块3。检查发现,中间传感器的角度向左偏离7°,调整后再进行拾取。
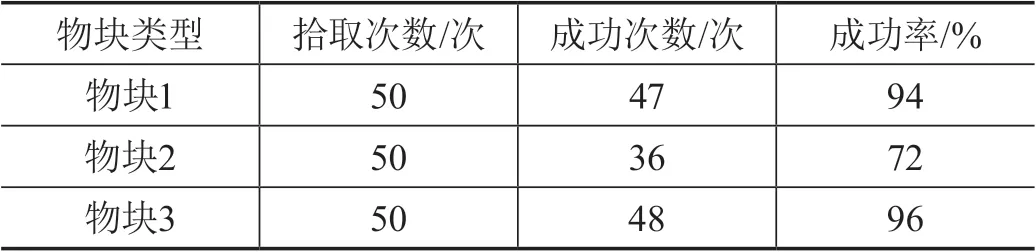
表2 第一组实验结果
如表3和表4所示,经调整后,机械手臂可以准确拾取物块。不改变传感器的角度,用上位机调整拾取角度再进行实验。
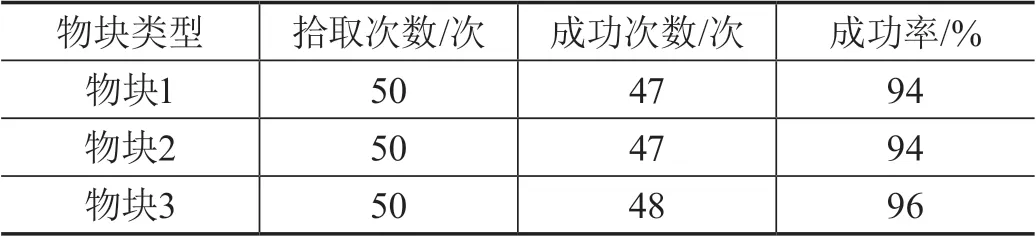
表3 第二组实验结果

表4 第三组实验结果
机械手可以通过上位机的调试进行不同位置的物体拾取。机械手臂在红外传感器的帮助下,可以将不同位置的物体拾取至目标处。将机械手与智能小车相结合之后,机械手可以在行进中识别物体,并拾取至目标处,从而实现自动分类。
4 结语
本文研究了医用废物自动收集系统,设计并分析了系统的结构组成,研究了系统的控制算法。该系统以机械臂代替人力将废物桶传送上废物车,完成操作后放置回原处。整个系统主要由传感器接受外界数据并反馈给系统和机械臂完成动作,两个部分协作完成。同时,废物收集车还有巡线功能,可以脱离人工操作按既定的轨道运行。实验表明,该系统能够有效地进行医疗废物的智能拾取和回收。它将声、光、电、计算机等不同技术融为一体,在柔性化生产和智能工厂中得到广泛的应用,具有运输效率高、节能、工作可靠、安全性高等特点,也满足了医疗领域智能化改造的需求。
