基于AI图像识别的输电线路无人机激光清障系统设计
2022-01-06赵振华
赵振华,杨 洋,高 培
(国网保定供电公司,河北保定 071000)
电力能源已成为人们生产生活必不可少的资源,国家电网建设规模也不断扩大,因此,电网线路的故障检测与维修工作越来越受到重视[1-2]。我国传统的电网线路检测方法,主要通过人工对线路进行检测,这种方法的成本太高,线路检测效率较低,还存在一定的安全性问题,实际操作比较复杂,难以满足日益发展的电网线路检测要求。尤其是许多高压输电线路会出现断股等危险性高的故障问题,人工检测的风险较大,对于复杂的电网线路也无法全面快速地实现故障检修,可见传统的输电线故障检测清理方法存在较多弊端[3-4]。
基于上述问题,该文设计了基于AI 图像识别的输电线路无人机激光清障系统,利用当前比较热门的无人机技术,通过激光检测清除输电线故障,同时结合AI 图像识别技术,提高故障检测效果,进一步提高清障系统的工作效率。
1 系统硬件设计
基于AI 图像识别的输电线路无人机激光清障系统硬件结构如图1 所示。
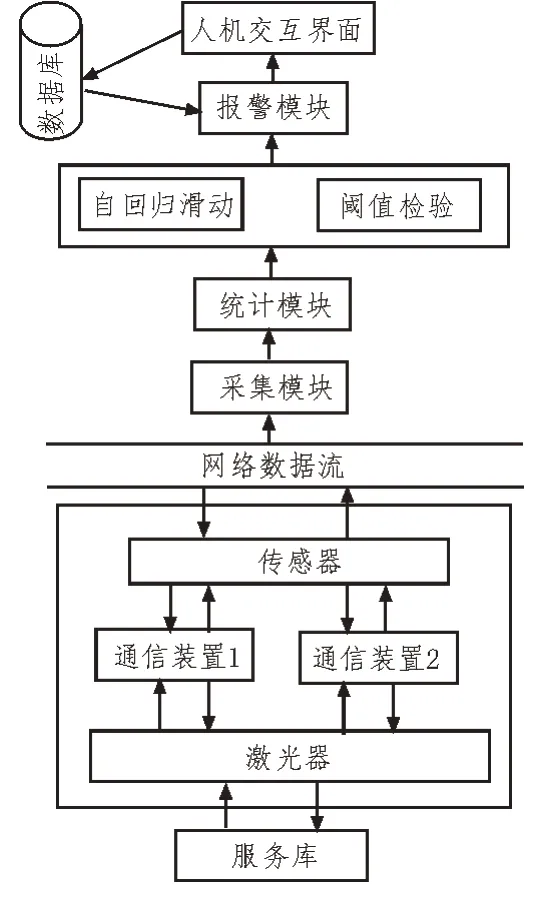
图1 基于AI图像识别的输电线路无人机激光清障系统硬件结构
1.1 传感器
对电网输电线路进行故障清理,首先需要采集获取到检测区域的输电线路高清图像信息。在巡检无人机上安装传感器,根据检测要求和任务目标图像的相关标准选择传感器型号;尽量选择体型较小的传感器,便于无人机装置;也要考虑巡检无人机负载量的承受范围。传感器光敏原件的性能要求较高,其图像采集的分辨率需要达到一定的标准,满足高清的输电线路图像识别要求。
该文选用CMOS 传感器,1)其感光二极管选用互补性金属氧化物半导体,光敏程度较低,有利于图像识别的真实性;2)具有很强的灵活性,图像捕捉采集能力较强,传感器良好的集成性使其图像采集分辨率较高,图像采集效果较好[5-6];3)而且反应速度快、功率小、耗能小,相比于其他传感器更省电,并且体积较小,适用于输电线路无人机巡检应用。无人机巡检过程中,传感器连续采集区域范围内的输电线路图像,图像信息依次导入通信装置,通过无线网络传输到后台控制服务器系统,系统根据图像信息进行具体的图像识别和故障检测。
1.2 激光器
巡检无人机同时安装有激光器。激光清障装置主要负责输电线路上的故障识别和清除工作,激光器前端的激光扫描器,能够通过发射激光和透镜相互作用,形成该区域输电线路的成像图像[7]。将图像传输给激光清障装置的图像识别系统,对图像进行输电线路的基础轮廓情况提取和故障图像识别检测,根据系统数据库中的故障图像对识别结果进行判定。激光器内部时钟芯片如图2 所示。

图2 激光器内部时钟芯片
如果识别出输电线路中的故障情况,将启动紧急告警系统,通知后台工作人员输电线路出现故障问题,并上报识别出的故障信息和故障定位。此外,根据故障类型以及输电线路周围的情况,系统能够判定是否自动处理。激光清障装置的识别系统,包括人像识别和故障识别,在进行扫描时,对周围情况进行检测,若未检测到人像,则表示该区域环境相对安全,可以进行激光清障操作,激光器启动清障程序发射激光直接对故障物体进行清理[8-9]。
1.3 通信装置
通信装置主要负责图像的接收与传输,该文设计的系统选取支持Internet 无线网、TCP/IP 网关协议的通信装置,连接无人机传感器、激光器与后台服务器。前端的无人机传感器与激光机采集获取到的图像信息,在内部进行图像格式修改,将图像压缩到合适的尺寸大小,并发送图像传输请求。请求通过后,将图像发送传输到后台中心服务器系统中,后台服务器接收图像发送请求并接收传输的图像信息[10-11]。通信装置可根据工作人员要求设定相应的网关协议和访问权限,以加强通信的安全性[12]。通信装置电路图如图3 所示。

图3 通信装置电路图
2 系统软件设计
在无人机输电线路巡检工作中,利用AI 技术对无人机巡检线路进行合理规划,并对采集到的图像进行识别。后台控制服务器根据前端无人机传感器和激光器传输的图像信息进行图像识别和分析,利用AI 图像识别系统对输电线路图像进行检测,获取到关于区域输电线路分布的基本情况,形成较为完整的线路图。然后计算程序根据无人机的负载能力和续航能力计算无人机一次的巡检距离,得到一个可靠的距离范围,再根据输电线路图像及分布情况作出无人机巡检线路的初步路线规划[13-14]。
利用AI 图像识别技术对输电线路图像进行图像识别,首先将获取到的输电线路图像进行尺寸还原或放大,同时要保证图像清晰度,然后利用图像识别系统对图像进行特征提取,并对同一输电线路不同角度的图像同时进行特征提取。特征提取过程中可根据特征关键点的分布情况进行分割,再分别对局部图像进行特征识别提取[15-16]。然后将相同场景的图像特征关键点进行相似度检验匹配,一定情况下可进行图像融合操作,以便更全面地对输电线路进行观察检测。图像识别和特征提取主要运用灰度检测法,其算法公式如下:

式(1)中,(x,y)表示图像像素点位置,l为图像识别的灰度等级,g表示像素点灰度系数,为常数,i为参与运算的像素点数量。经过该公式运算能够得到输电线路图像识别中相邻图像的灰度检验均值范围,然后可根据这一范围对检测图像素材的任意像素点进行相关灰度检测。根据灰度检验结果,可对输电线路图像进行异常情况分析,进而得到线路故障的具体情况。
式(2)中,P表示输电线路灰度图像,J表示该图像对应的灰度均值,(x,y)表示图像像素点位置坐标。在式(1)的运算基础上,通过式(2)的计算进一步对图像特征情况进行分析,检测异常数据的存在情况,实现输电线路故障的精准识别。
基于AI 图像识别的输电线路无人机激光清障系统软件工作流程如图4 所示[17-19]。
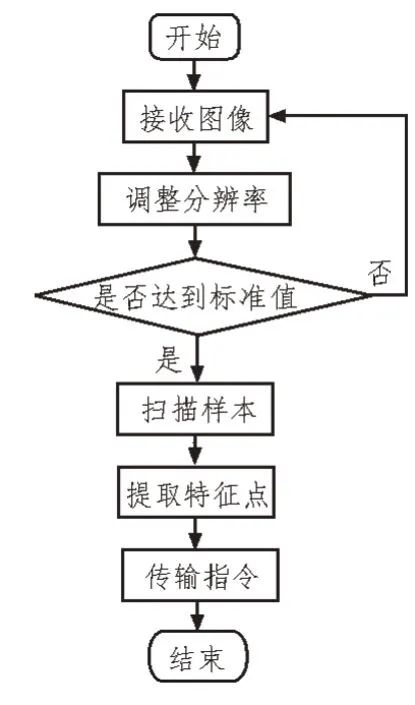
图4 系统软件工作流程
1)将无人机传感器与激光器采集到的图像接收到图像处理系统中,按照需求进行图像比例还原或放大,根据原图像的色彩状况进行色彩光影对比度、饱和度的调整,利用滤镜增强图像的清晰度均衡图像的色彩分配,一定情况下可进行分辨率调整,对图像进行初步预处理。
2)扫描样本图像,识别图像的背景部分,并对感觉背景和线路图像轮廓边缘进行精准分割,实现输电线路图像和背景的分离。
3)提取其中的特征点,必要情况下可进行图像分割,分别对局部图像特征点进行识别提取。将特征图像和像素点数据信息导入图像处理程序,对其进行灰度检验和图像相关性检验,获取图像的灰度数值以及与其他图像的相似度。
4)将指令传输到无人机端,无人机激光器根据指令内容对线路故障进行清除或维修。
3 实验研究
为了检验基于AI 图像识别的输电线路无人机激光清障系统的实际应用效果,该文进行了实验研究。实验对象选取存在输电线路断股故障的电网线路,输电线路出现断股故障时往往出现电线宽度增加、出现股线分散外露等现象。选用基于AI 图像识别的输电线路无人机激光清障系统、基于图像识别的输电线路无人机激光清障系统和基于缺陷识别的输电线路无人机激光清障系统对该区域进行巡检和故障识别,同时选用传统的清障系统进行故障检测,并记录断股故障的图像识别效果。3 种系统的输电线路故障检测图像识别效果如图5 所示。
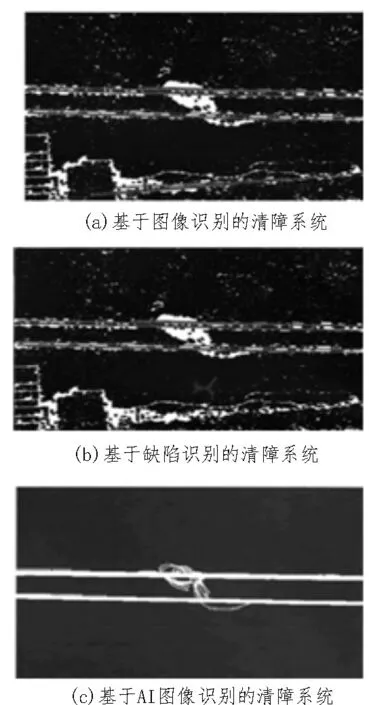
图5 3种系统的输电线路故障检测图像识别效果对比
根据图5 可知,基于图像识别的清障系统和基于缺陷识别的清障系统均存在一定问题,图像检测不清晰,输电线路图像呈现颗粒状分散、背景杂乱、白噪点干扰较多,而基于AI 图像识别的清障系统图像识别分辨率更高,图像更清晰连贯,完整地展现了输电线路的故障图像。由此可知,基于AI 图像识别的清障系统输电线路故障检测图像识别效果较好,故障检测识别的图像更清晰。因为基于AI 图像识别的清障系统在故障图像识别处理程序中采用了AI图像识别技术,使图像识别检测效果更清晰,而且能够明显看出该图像实现了故障图像前景与背景部分的分离,删除了图像中的多余干扰部分,使故障图像更加突出。识别效率实验结果如图6 所示。
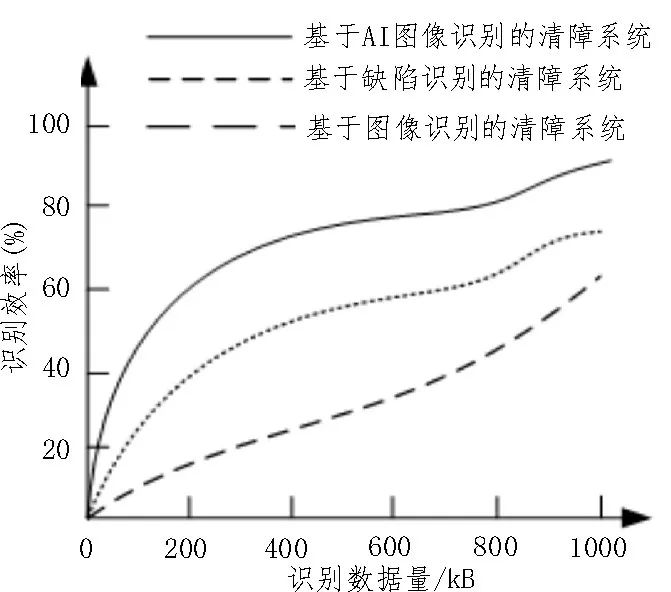
图6 识别效率实验结果
根据图6 可知,当识别数据量为1 000 kB 时,基于图像识别的清障系统平均识别效率为42%,基于缺陷识别的清障系统平均识别效率为63%,而基于AI 图像识别的清障系统识别效率为85%,相比基于图像识别的清障系统和基于缺陷识别的清障系统识别效率,基于AI 图像识别的清障系统识别效率较高。
4 结束语
该文针对传统的输电线路无人机清障系统存在的识别清晰度和效率低的问题,利用AI 图像识别技术,设计了基于AI 图像识别的输电线路无人机激光清障系统。通过AI 图像识别技术对传感器采集到的输电线路故障图像进行处理,实现故障部分与背景的分离,更清晰地展现线路的故障部分,提高了输电线路故障检测的准确性和工作效率,图像识别效果好,能够满足当前的电网线路故障检测工作需求。
