面向可变功能的机械产品变形设计研究*
2022-01-06徐灵浩贺华波邓益民
□ 徐灵浩 □ 贺华波 □ 邓益民
1.宁波大学 机械工程与力学学院 浙江宁波 315211 2.浙江省零件轧制成形技术研究重点实验室 浙江宁波 315211
1 可变功能机械产品概念
可变功能机械产品指可以通过更换系统构件或调整构件间连接方式,进而实现功能切换的特殊多功能机械产品[1]。目前关于可变功能机械产品的设计,主要集中于设计通过更换构件或结构体来实现功能切换的可变功能机械产品,在功能变换过程中存在零件频繁拆卸和装配的情况,不仅降低产品作业效率,而且会对产品的寿命造成影响。为此,有必要开展不需要更换系统构件就能够达到功能变换的可变功能机械产品设计研究。壁挂式折叠桌、多功能工兵铲等不需要更换系统构件,而是通过产品的结构变形来实现产品功能的变换。也就是说,这些产品基于可变形结构而具有可变功能。
目前,以可变功能机械产品为对象的研究在设计研究领域还相对较少。在设计研究领域中,可重构设计和可适应设计在研究对象上与可变功能机械产品设计存在一定程度的相似[2-3]。可重构设计主要通过重新改变系统配置,以获得设计方案。可适应性设计主要侧重于系统性能的可适应性,而非系统功能的可适应性。Meyer等[4]通过研究表明,在实际设计任务中,大约有70% 属于变型设计。这里的变型主要指产品结构构成基本保持不变,设计人员根据新的设计要求对结构参数做相应调整、改变,从而产生新的产品型号或系列。另一方面,一些中文文献对变型设计和变形设计两者不加区分,认为变型设计不破坏原设计的基本结构特征和基本原理,通过现有产品尺寸、配置、结构的改变来高效、快速地满足客户对产品个性化的需求[5-7]。由此,变型设计部分涵盖了笔者变形设计的内容,但相关研究并未涉及实现可变功能这一特定情况。笔者在对相关可变功能实例分析的基础上,针对仅对系统结构进行变形就能实现目标功能转变的可变功能机械产品设计方法展开研究,为机械系统的变形设计和开发提供技术支持。
2 产品相似性分析
目前,对于功能还不存在统一的定义。Pahl等[8]认为,功能是一个系统中输入与输出唯一确定且能够再现的相互关系,用于完成系统能量、物料、信号的转化。Stone等[9]提出功能基的概念。功能基是一种由流与功能组成,用于表达设计方案的语言,这种语言用动词+名词的形式来描述产品功能[10]。
不同的机械产品虽然具有不同的目标功能,但是在产品内部的部分功能上一定存在某种程度的相似,通常情况下,一个机械产品的总功能可以按照功能树方法逐层进行分解,直到分解为元功能[11]。通过产品目标功能实现过程中执行的元功能的先后顺序关系,结合能量、物料、信息流的传递方向与转换位置,可以对元功能进行连接,进一步获得功能链。将产品功能模型中包含元功能最多的功能链定义为主功能链,主功能链的相似性通常决定不同产品在功能方面的相似性。通过比较不同产品间主功能链中的相似或相同元功能的数量,可以判别两条主功能链的相似度大小。一般而言,具有功能相似性的机械产品,某些结构或部件也具有一定的相似性,相似程度与所对应的功能存在一定关联,由此这些机械产品具备设计为一个产品的潜力。
为了便于准确比较各元功能间的相似性,在0~1区间内选择相似值,0代表两者功能完全不相同,1代表两者功能完全相同。按照不同的功能描述,以及输入流、输出流相似程度,划分为不同的相似值范围,每个相似值范围中的具体相似值大小由设计人员结合具体情况决定。
功能相似度判定表见表1。

表1 功能相似度判定表
基于功能相似度判定表,以及在元功能实现过程中相关结构体的参与情况,可以进一步得到产品结构相似度。产品结构相似度表示产品结构间的关联关系,是产品功能相似度的映射。
3 可变功能机械产品变形过程分析
3.1 产品结构体类型
为便于开展对多个原单一功能的机械产品进行面向可变功能的再设计,基于这些产品的结构在再设计过程中的作用特点,以及结构相似性分析,将不同相似度的结构体归类,并定义为三种主要结构类型。具体划分类别的相似值范围,可以依据产品类型的不同适当调整。
(1)基础部分。主要执行产品的基础功能,由大多数相似度极高的结构体组成。实现基础功能的结构体在客观功能的表现上往往相似,并且结构体间的关联性极强,所起到的功能作用基本相同,稍加修改基本可直接应用于可变功能机械产品。
(2)共性部分。主要执行产品的共性功能,由大多数相似度适中的结构体组成。这些结构体既表现出结构的相似性,又表现出结构的差异性,是功能相似性和差异性在物理层面的具体表现形式。
(3)个性部分。主要执行产品的个性功能,由少数相似度极低或毫无相似度的结构体组成,负责原产品的应用功能,表现产品的功能特点,是产品自身与其它产品相区别的应用集合。
3.2 结构体变更设计
由于产品结构体自身的设计思维差异和加工性能、材料的不同,为获得能够满足多个功能目标要求的可变功能机械产品的结构体,需要对原产品的结构体去除差异性,并重新设计部分结构。为此,笔者针对三种主要类型结构体提出三种设计策略。
(1)选优设计。工程师结合不同产品结构体的加工性能和使用度,选择基础部分中性能较好的产品结构体予以保留,并稍加修改,来实现局部性能的提升,得到可以直接应用为可变功能机械产品的基础结构体,作为承担可变功能机械产品的基础功能载体。
(2)集成设计。对共性部分中的结构体进行合成,将多个不同产品的结构体功能结构特征集成到一个新结构体上,使新结构体能结合变形操作手段,在不同功能状态下发挥出不同的功能结构特征,可以应用为可变功能机械产品的共性结构体,作为承担可变功能机械产品的共性功能载体。
(3)重新设计。对结构关联性较弱的个性部分结构体分别进行重新设计,主要包括形状、尺寸、材料,以配合可变功能机械产品不同结构状态下实现不同目标功能。
3.3 变形类型
通过对多种不同类型可变功能机械产品的研究分析可知,基础结构体、共性结构体、个性结构体在满足相应约束条件下进行组合变形,可以实现不同的功能,从而使机械产品具有不同功能。笔者通过改变结构体间连接方式,以及对不同结构体采用旋转、拉伸、折叠、压缩、平移等变形操作手段,使结构体的空间几何位置、形状、组合方式等发生变化,实现共性结构体不同功能结构特征的释放与压缩,以及个性结构体的切换,最终达到可变功能的目的。基于上述分析,将可变功能机械产品的主要变形类型分为三类。
(1)类型一。产品仅包括基础结构体和集成后的共性结构体,通过变形操作使同一共性结构体在不同目标功能状态下发挥不同的功能结构特征,使目标功能发生改变,最终实现可变功能。
(2)类型二。产品仅包括基础结构体和一个以上的个性结构体,通过变形操作对具有不同应用功能的个性结构体进行切换,使目标功能发生改变,最终实现可变功能。
(3)类型三。产品同时包括基础结构体、共性结构体、个性结构体,通过变形操作使同一共性结构体在不同目标功能状态下发挥不同功能结构特征,并对具有不同应用功能的个性结构体切换,实现可变功能。
4 可变功能产品机械结构-视图模型
笔者以黄长林等[12]提出的零件族结构-视图为参考,基于对可变功能机械产品变形过程的分析,建立面向可变功能机械产品的产品级结构-视图模型。通过模型中的结构参数和空间约束,描述产品的规格和性能,同时描述产品、部件、结构体,以及它们之间的相互关系,得到将产品变形设计所需的结构体在实施空间上进行布局与拼接后构成的可变功能机械产品。
可变功能机械产品模型M可以表示出构成产品的结构体集合及相关的约束关系。
M=(C,E)
(1)
C为结构体的空间布局约束,包括所有结构体的空间定位关系及参数,可以表示产品各结构体间的位置及相互关系。E为构成可变功能机械产品的结构体集合,包括结构的几何及拓扑关系、结构变形类型、结构尺寸参数等。
(2)
Sjk为第j个结构体第k种结构体类型的产品识别码,k为1表示基础结构体,k为2表示共性结构体,k为3表示个性结构体。A为结构体的属性集合,包括结构体的材料、力学性能,以及经过结构体的输入流、输出流等。I为结构体变形编码,包括多种结构体间的变形算子,如旋转©、压缩Ξ、拉伸ι、折叠Φ、平移-、无×。Dj为第j个结构体的尺寸参数集合。
结构体的视图可以作为结构的信息载体,视图模型V为:
V={Vl,Sjk,L,Q}
(3)
Vl为三维视图的标志码,l为1表示功能变更前,l为2表示功能变更后。L为定位点,包括定位点的位置坐标与相邻结构体的变形算子。Q为旋转角度,包括相对于上一结构体的相对角度和相对于坐标系统的绝对角度。在结构-视图模型中,相对角度通常标注于绝对角度上方。
5 实例分析
对两个单功能产品无人机和无人车进行面向可变功能的变形设计,使单功能无人机和无人车仅通过改变结构形态就能够实现飞行与地面行驶功能,成为具有双重功能的可变功能无人机。
分别对无人机和无人车的总功能按照功能树进行逐层分解,直到获得相应的元功能,并将元功能连接为功能链。分别选取无人机和无人车的主功能链,建立功能逻辑图,分别如图1、图2所示。

▲图1 无人机功能逻辑图
根据主功能链中元功能的功能描述,结合表1,考虑各元功能实现过程中相关结构体的参与情况,进行结构相似度分析,并进一步根据各结构体不同的相似度及结构特点,将无人机与无人车的不同结构体划分到基础、共性、个性三部分,见表2。

▲图2 无人车功能逻辑图
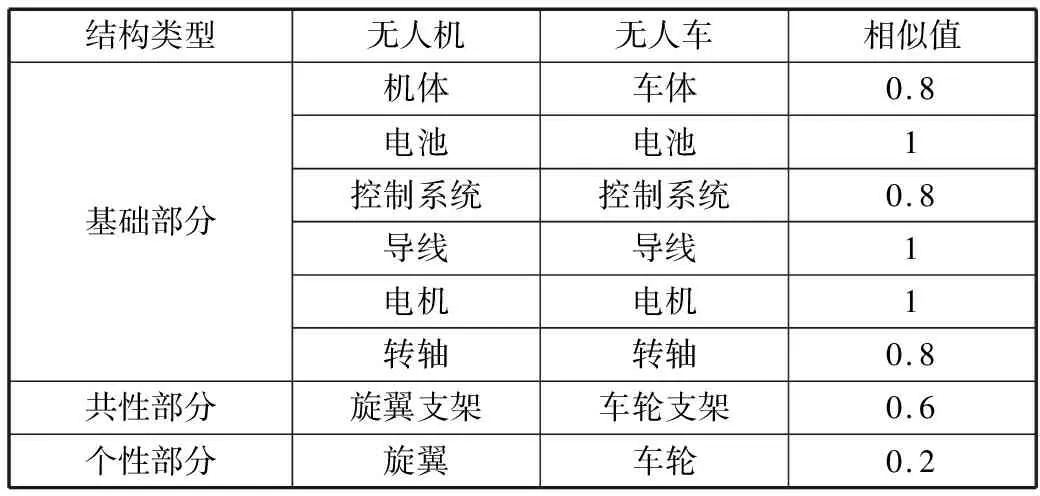
表2 无人机与无人车结构类型
通过进一步分析无人机和无人车的工作模式、结构,以及向目标环境的输出属性,包括力的大小和方向,笔者决定采用旋转变形手段和平移变形手段来改变共性结构体的功能表面,切换个性结构体,传递动力,最终实现功能的切换。
在上述分析基础上,分别针对不同类型结构体进行相应设计。对于基础部分的结构体而言,分析无人机和无人车功能的使用度,考虑加工性能,选取无人机产品中的机体、充电电池、控制系统、导线、电机、转轴稍加修改,作为新产品的基础结构体,即机体S11。针对共性部分的结构体旋翼支架和车轮支架,集成设计为一个特殊支架,使其可以同时对旋翼和车轮起支撑作用,作为新产品的共性结构体,即支架S22。对个性部分的旋翼和车轮进行重新设计,增大车轮直径,减小车轮厚度,将材料更换为更轻便的复合材料,并增大旋翼的尺寸。将重新设计后的结构件作为新产品的个性结构体,即旋翼S33和车轮S34,发挥不同的应用功能。最后根据各结构体的参数和空间约束,建立可变功能无人机的结构-视图模型,如图3所示。图3中,实线箭头表示处在工作时的结构位置层次从属关系,虚线箭头表示处在非工作时的结构位置层次从属关系。
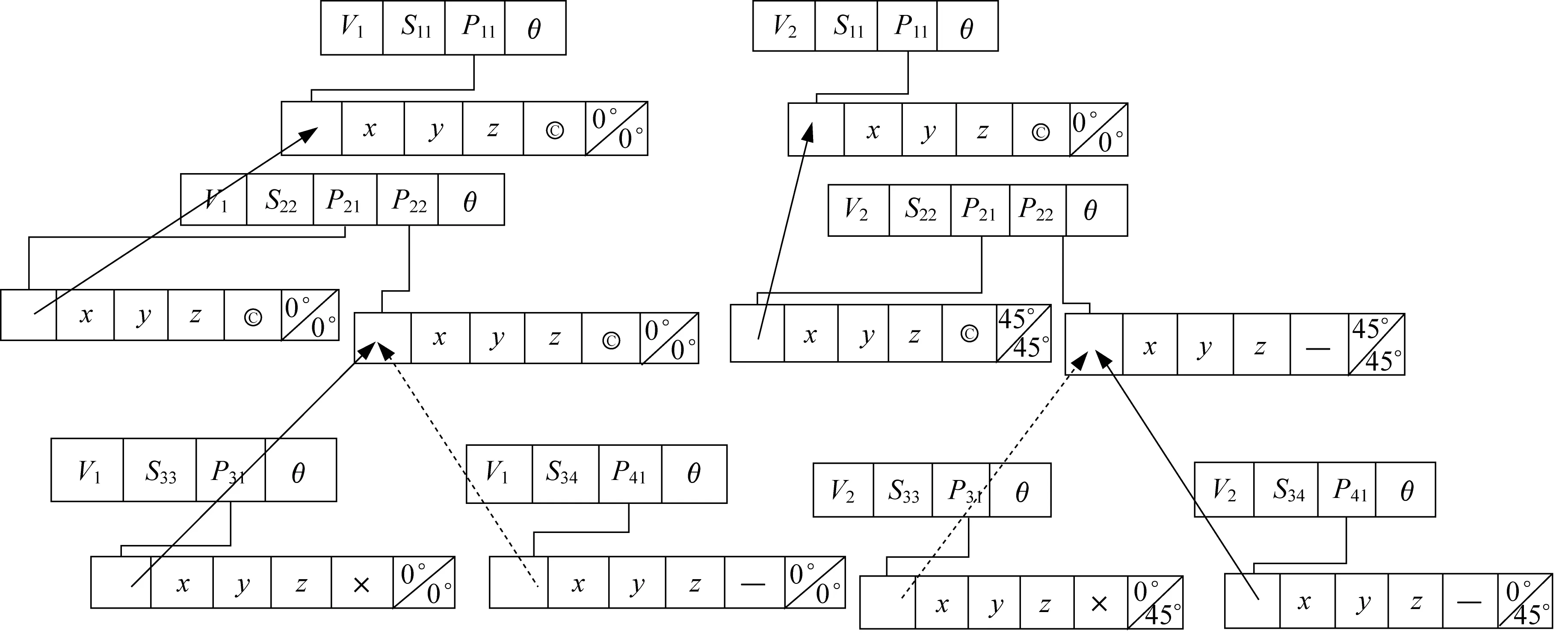
▲图3 可变功能无人机结构-视图模型
由于作为基础结构体的无人机部分结构体变动不大,因此在结构-视图模型中只对机体、支架、旋翼、车轮四个结构体进行分析,在此基础上建立可变功能无人机概念模型,如图4所示。
可变功能无人机在支架处于水平状态时,旋翼与电机接触,车轮结构体远离电机,发挥无人机的功能。通过旋转和平移变形操作后,车轮结构体与电机接触,发挥无人车的功能。
6 结束语
目前设计研究领域中缺少通过系统结构形态改变来实现功能变换的机械产品设计方法,对此,笔者提出面向可变功能的机械产品变形设计方法。通过对不同产品的相似性,以及不同构件间运动连接方式的特点进行分析,对相关结构进行分类,对不同结构类型进行变更设计,得到可用于新产品的结构体,并在此基础上构建相关的结构-视图模型,描述新产品各结构体之间的相互关系,进而实现将多个单一功能产品再设计为一个仅需通过产品结构形态改变就可以实现功能切换的可变功能新产品。这一方法对可变功能机械产品的设计和开发具有一定的指导意义,其中不同结构类型的划分方法,以及如何针对不同结构类型进行相应变更设计,还需要开展进一步研究工作。

▲图4 可变功能无人机概念模型
