智能布线机器人系统的设计与研究
2022-01-06王海亮周腊吾马勉卓龙乐云
王海亮,周腊吾,马勉卓,龙乐云
(1.长沙理工大学,湖南 长沙 410114;2.湖南世优电气股份有限公司,湖南 湘潭 411101)
0 引言
制造业的发展对于人类文明的重要性是不言而喻的,科学技术的每一次创新,都以制造业生产力的突飞猛进为表现[1]。某种程度上制造业能具体地反映一个国家的生产力水平,更能直接作为判断一个国家是否是发达国家的依据。在全球所有发达国家的国民经济中,制造业一向处于最为重要的位置[2]。
在电控柜生产制造领域,电能都是以导线作为载体,连接不同的元器件,布置在安装板上,最终组装成功能各异的电控柜来加以使用的[3-5]。目前在对电控柜进行具体设计生产制造时,安装板上的剥线、压端子、贴标签、布线、拧端子螺丝等工序依然采用人工操作的方式[6-7],不仅生产效率低,而且经常出现压端子时线头不标准的情况,时常会出现螺栓未拧或拧紧力不够等工艺问题,造成器件损坏,严重影响产品质量。
智能布线机器人是现代控制领域中出现的一项新技术。进行智能布线设备的研发,将剥线、压端子、贴标签、布线、拧端子螺丝等工序实现智能化和自动化,大大提升工作效率,降低劳动强度和制造成本[8-10]。智能布线设备的研发对于提高自动化智能装备制造业水平意义重大。
1 智能布线机器人系统的组成
智能机器人是依赖自身动力和编程所带来的控制能力。按应用环境分为工业机器人和特种机器人;按功能分为操作型机器人、智能机器人、学习型机器人等适应性机器人[11]。智能机器人以其丰富的科技内涵和可重化的多样化布局广泛利用于多种领域[12-13],智能布线机器人就属于其中之一。
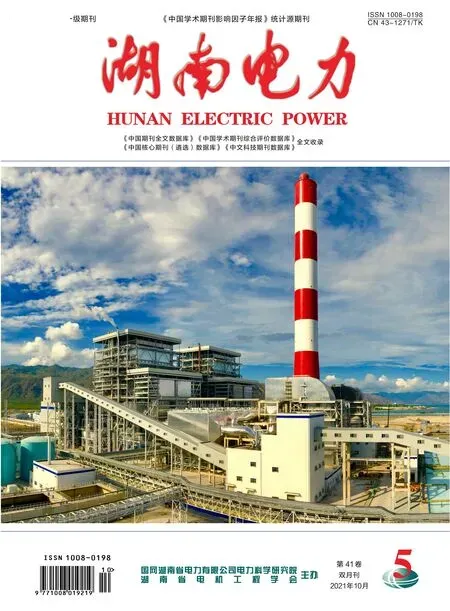
智能布线机器人由硬件系统和软件系统组成,如图1 所示。硬件系统主要包括移动单元、裁剥压单元、接线单元以及辅助设备等。运动控制卡被广泛地应用在国民经济和社会生产的各个领域,智能布线机器人通过运动控制卡执行应用软件,控制电动机、气缸或液压缸等元器件运动,并通过传感器、开关等元器件检测机械系统的状态并反馈至运动控制卡。
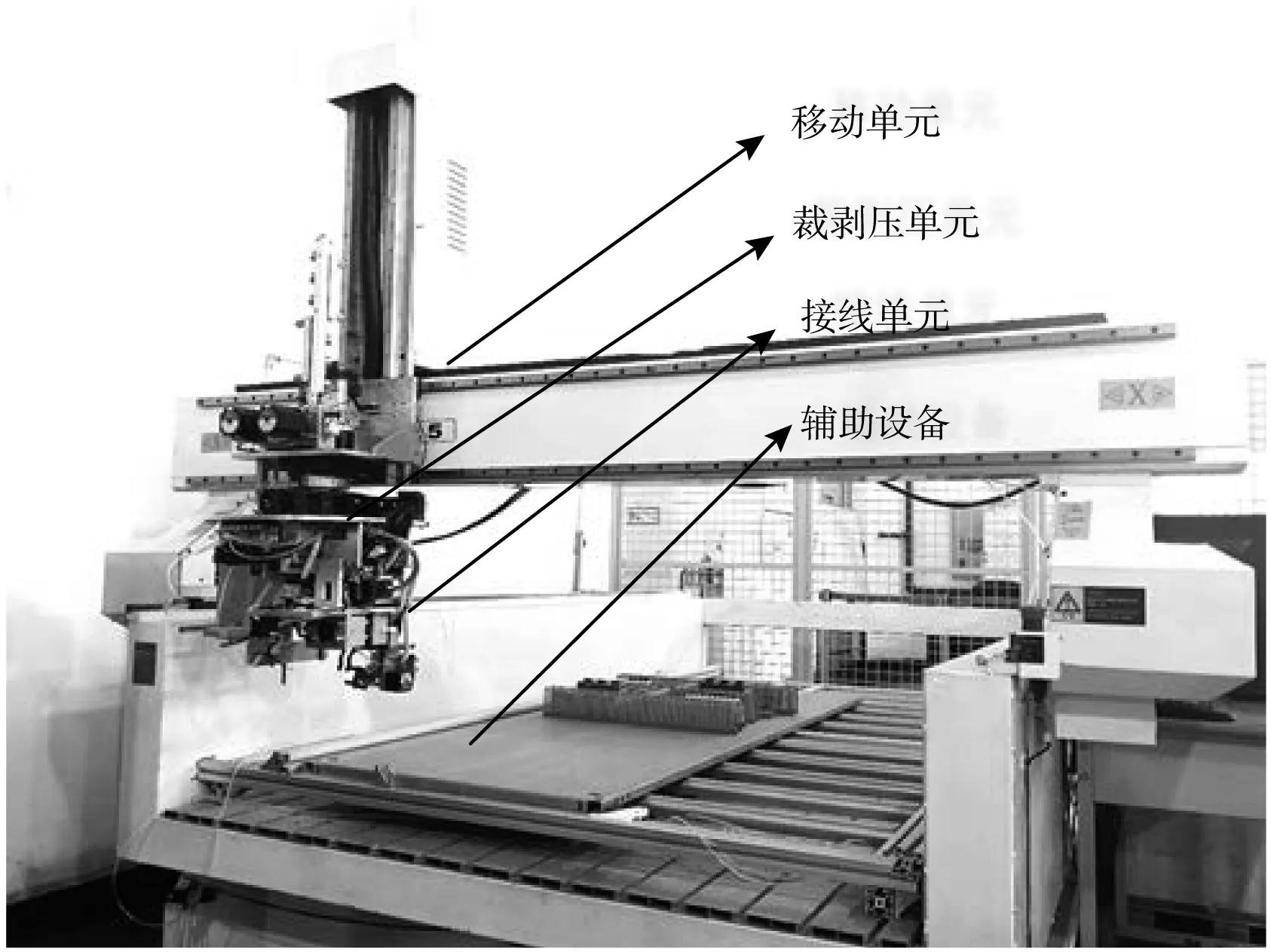
图1 智能布线机器人系统平台
1) 移动单元。布线机器人的移动单元由X轴、Y 轴组成,其作用是通过控制X 轴、Y 轴的三个伺服电机,使安装在X 轴横梁上的多功能头移动到机床布线板的指定位置,同时也可以和送线电机以及导线管升降电机配合完成在线槽内布线的工作。Y 轴2 个伺服电机需要同步运行,以达到平稳对称。
2) 裁剥压单元。裁剥压单元主要包含了裁线、剥线、压接端子及接线等功能。首先利用两个夹线气缸的闭合,夹住位于其中间的线缆,通过送线电机旋转完成送线和收线运动。线缆在送线电机的作用下穿过下方导线管,到达指定位置,等待裁剥压位移电机移动到裁线位置,由裁剥压动力电机和送线电机配合完成裁线、剥绝缘层工作,然后端子输送电机运送端子放入压接模块中,裁剥压位移电机、裁剥压动力电机、送线电机配合完成线缆和端子的插入和压接,从而完成裁线、剥绝缘层和压接端子的过程。
3) 接线单元。当线缆完成裁线、剥绝缘层和压端子过程后,接线单元需要完成把做好的线缆接入指定元器件并上紧螺丝的工作。接线单元主要包括旋转平台、主夹爪控制、电批控制、换向夹爪控制、Z 轴控制以及导线管控制等功能。通过主夹爪夹取线缆,判断是否需要旋转多功能头和是否需要让线缆换向,判断并执行完毕后,主夹爪到达指定接线的元器件孔位处,主夹爪推进电机控制线缆插入元器件孔位,电批动作上紧螺丝,从而完成接线步骤。
2 智能布线机器人的软件开发
LabVIEW 是美国国家仪器公司 (National Instruments,NI) 开发的基于C 语言的图形编程开发环境[14-16]。一个最基本的虚拟仪器通常由前面板、程序框图及图标连线端口3 部分组成[17-20]。利用LabVIEW 的调用动态链接的方法建立运动控制卡的驱动程序库。LabVIEW 程序不仅易于编写、执行效率高,而且能够精确实现数据的可视化。这使得系统的灵活性、功能性大幅提高。
智能布线机器人软件系统设计方案,包含了前面板用户界面、路径规划、运动控制、归零控制和输出状态及位置显示等主要功能模块和程序框图,对涉及坐标数据处理和提取、点位运动控制、插补运动控制、输出点位控制、初始化归零等功能进行整合。LabVIEW 采用的图形化编程模式,操作简单、运行可靠及可视性好,可以对步骤和工艺进行逻辑控制,同时也可以有针对性地、便捷地调试程序。通过这些模块完成了软件系统对硬件执行机构的精准控制。软件系统设计框图如图2 所示。
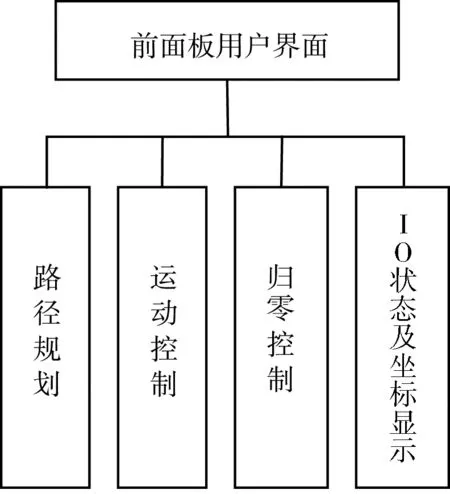
图2 软件系统设计框图
3 智能布线机器人的试验验证
通过多次线缆制作试验,本文设计的智能布线机器人设备能完成线缆制作的工作,线缆和端子分别采用图3 (a)、(b) 中所示样品,试验结果见表1。
图3 线缆、端子及漏铜线缆
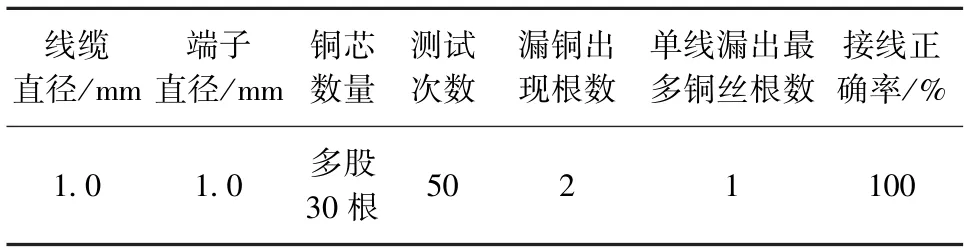
表1 线缆制作参数及试验结果
在线缆制作试验过程中,总共制作了50 根线缆,其中2 次出现了铜丝未能完全压入冷压端子,即漏铜的情况,如图3 (c) 所示,每根漏铜的单线漏出铜丝根数均为1 根。根据判定标准:19 金属丝的金属线为例,缺少1 根金属丝是可以接受的。绝缘层包裹标准和拉拔力测试均达到判定要求,所以最终判定50 次制作线缆试验合格。
最后在调试过程中对硬件线路进行检查后,进行了上电检测、运动控制卡IO 调试、电机运动调试,对硬件的各个运动控制参数进行了标定。
对智能布线机器人设备进行布线试验,这是一个综合性功能试验。通过上位机导入线材表后,提取表格数据,通过既有数据执行软件程序,布线机器人完成自动夹紧安装板,自动送线,自动裁线、剥绝缘层,自动压接冷压端子头,自动将线缆插入元器件,智能布线等所有功能。通过布线试验验证,对布线机器人实际布线成果进行查验,智能布线机器人能够完成上述所有功能,自动完成制线和布线工作。
4 结论
本文对工业制造中的布线、接线环节进行研究,通过运动控制卡,确定上位机和运动控制卡控制步进电机和伺服电机等执行机构的硬件方案。研究各类硬件性能参数,从方案、性能、成本等角度考虑,完成选型并确定满足技术性能需求的硬件器件,最终完成系统平台的搭建。软件方面研究和设计布线机器人系统的运动控制软件系统,包括用户界面、路径规划模块、运动控制模块、归零控制模块、IO 及坐标显示模块以及具体的执行步骤。最终设计了一套可以智能完成布线、制线工作的机器人设备,并探索虚拟仪器技术在智能布线机器人上的应用,试验结果证明了该平台的可靠性和实用性。