基于模糊PID 控制的节水灌溉智能控制系统设计研究
2022-01-06新疆天业节水灌溉股份有限公司刘雪林
新疆天业节水灌溉股份有限公司 刘雪林
前言
植物生长中,水具有关键作用,我国幅员辽阔,地大物博,但对于水资源十分缺乏,同时大水漫灌作为我国传统灌溉方法,其与监测旱情对人工十分依赖,这种方式会造成水资源大量浪费、肥料流失和土壤盐碱化,对我国农业发展造成严重影响,进而影响到国家的长久治安。节水灌溉技术的出现就是为了对传统灌溉方式进行改变,基于作物需水特点,用有限的水产出最大的经济效益。随着计算机等技术的发展,农业经营逐渐转变为智能化、大型化、集约化,智能灌溉技术发展迅速。模糊控制无须知晓准确的数学模型,凭借工程人员经验和领域专家知识就可对控制策略进行制定,其是模拟人的思考行为,属于非线性控制措施。该方法控制精度误差较大,但具有较好的兼容性,响应速度快,PID 控制器适应性强,鲁棒性好。基于此,本文通过模糊控制结合PID 控制的方法,改善系统控制精度差和系统超调量大等问题[1]。
1 系统总体设计方案
通常情况下,设计系统程序方法为模块化结构设计,这种方式对程序的调试和编写有利,还可以缩短系统开发周期。基于模糊PID 控制的节水灌溉智能控制系统,其组成部分包括电球阀、水流传感器、土壤湿度传感器、从机模块、信电共线主机模块、MCGS 组态系统、模糊PID 控制器等。水流传感器可对电动球阀的闭合及开关状态进行反馈,并对水流流量进行检测。从机土壤湿度传感器能够有效收集土壤中的相关信息,并将这些信息基于主机模板传送至模糊PID 控制器对其进行科学处理,并将处理后的信息反馈到主机模块中,基于此可有效控制电球阀状态,确保对节水灌溉系统实施智能化的操作和控制。从机模块和主机模块通信,需要经过Modbus 协议。MCGS 组态系统可与主机模块通信,并对相应从机进行有效控制,对传感器状态和各个分机状态进行显示,并对土壤湿度进行设定[2]。
2 信电共线硬件设计
2.1 主机核心电路设计
系统支持12~48V 总线电压直流向从机发送控制信号。通过485 总线对模块EV620 和MCGS 组态屏通信进行有效保证,总线故障指示引脚为BRK。MCGS 传输的串口信号被EV620 接收到之后,发送给从机信号时,利用控制引脚BH,基于供电得到满足的情况下,使总线输出脚L1 的电压值出现小范围的波动,使总线上的电压信号具有规律性变化,以保证从机的有效识别。当到从机发送的应答信号被EV620 接收到之后,引脚BL 对总线电流变化进行检测,将其转变为可识别信号,利用串口发送给MCGS 组态屏并进行显示。主机核心电路如图1 所示。
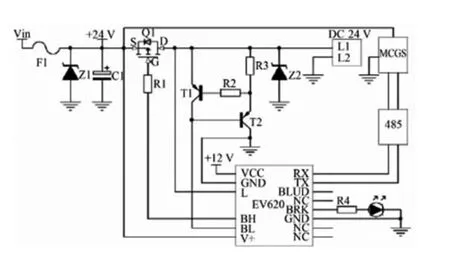
图1 主机核心电路
2.2 从机核心电路设计
信号输入端为控制芯片PB331 的PI 引脚,对主站输送的电压信号进行检测,从而对其发送的指令进行识别。信号输出端为PO 引脚,通过对T1 的导通进行控制,从而对总线电流进行控制,发送主机至应答信号。MCU 单片机为增强型8 位8051 内核微控制器,带有flash,电球阀状态、传感器数值读取通过IO 口,并对电球阀运行进行控制。电球阀为Valve,水流传感器为SL,土壤湿度传感器为TR。主站发来的电压信号经PB331 的PI 引脚检测后,利用串口发送给MCU,对相关操作进行执行。MCU 发送的应答信号被PB331 接收之后,控制PO 脚对T1 进行关闭或导通,使电流信号在总线上具备可以观察到的规律性变化,以保证主机进行识别[3]。从机核心电路如图2 所示。
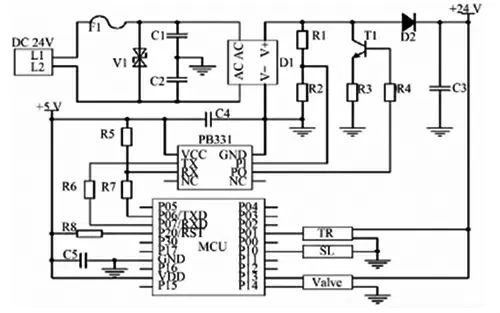
图2 从机核心电路
3 组态系统介绍及信协议设计
3.1 MCGS 组态系统介绍
MCGS 组态屏为一体化嵌入式高性能触摸屏,核心为Cortex-A8CPU,系统参数通过MCGS 人机界面显示,并实施运行控制和系统参数设置,其组态系统工程的建立包括五个部分,分别为运行策略、实时数据库、用户窗口、设备窗口、主控窗口。本组态系统包括分组界面、主界面、登录界面等。
3.2 通信协议设计
为了有效提升MCGS 组态系统通信的便利性,信电共线主机和从机均对Modbus-RTU 通信协议进行使用,利用从机向主机响应,主机对从机发送请求的方式,完成数据交互。一台主机监控多台从机,针对实际情况对控制指令进行编写。主机对从机状态的命令进行读取,并对从机电球阀开关的命令进行控制[4]。控制格式为:主机对灌溉状态进行检测,对从机状态的命令格式进行读取:高位CRC、低位CRC、0x05、0x00、0x04、0x00、0x04。主机对从机电球阀的命令格式进行控制,高位CRC、低位CRC 为校验码,0x05、0x00 表示读取的寄存器个数,0x04 为功能码,单个读。第一个读取的数据寄存器地址为0x00、0x04。从机地址为高位CRC、低位CRC、0x01 或0x00、0x00、0x04、0x00、0x06。0x06 表示功能码为单个写。电球阀状态寄存器地址为0x00、0x04。电球阀打开指令为0x00、0x01,电球阀关闭指令为0x00、0x00。校验码为高位CRC、低位CRC。
4 模糊PID 控制器设计
4.1 模糊PID 控制器原理介绍
模糊控制对人类思维进行模拟,基于模糊集合进行发展,使用自然语言对实践数据经验进行表述并对其实施模糊决策、归纳总结、逻辑分析,制定出简单明了的控制规则。自动控制的实现需要通过硬件设备和计算机编程语言[5]。对比传统控制措施,模糊控制优势显著。设计控制系统只通过人员经验和专家知识就可对控制策略进行制定,无需精确的数学模型,就可以确保系统运行的效果。模糊控制系统兼容性较强,可以结合传统反馈控制,有效解决大时滞、非线性等问题。使用自然语言变量对数字变量进行代替,其对人处理问题的方式更加接近。模糊控制系统基于单片机,结构上与一般的数字控制系统没有差别,运行通过查表法进行,操作人员容易掌握和接受。
控制器中,实际检测值y(k)和k 时刻的土壤湿度设定值r(k)构成土壤湿度偏差e(k)。前一个时刻的误差e(k-1)和当前时刻误差e(k)构成偏差变化率ec(k)。变量Kd、Ki、Kp 和ec(k)、e(k)构成输出变量u(k)。通过输入变化率和偏差,按照模糊规则获得相应变化量,加上原来设定的PID 参数,算出传递给输出的变量。模糊PID 控制器原理图如图3 所示。
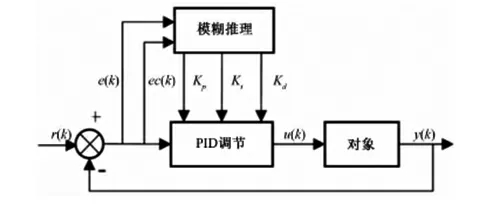
图3 模糊PID 控制器原理图
4.2 模糊PID 控制规则
根据结构划分,模糊PID 控制器可分为参数自适应模糊PID控制器和模糊控制器。前一种控制器构成包括模糊控制器和PID控制器,后一种直接由模糊控制器构成,PID 控制器功能的实现,主要是调整比例因子、控制规则、模糊控制器量化因子,并且可对PID 参数进行调整。建立本模糊控制规则的原则为:若输入偏差e(k)出现偏大时,向误差减小的方向调整,减小误差之后,应对超调现象尽量避免,保持系统稳定。规则为:若偏差e(k)较大,则土壤湿度具有较大差别,应对系统调节进行加快,减小ΔKd,加大ΔKp,保证系统达到预定值。为了对系统超调进行避免,可选择较小的ΔKi 值。若偏差e(k)较为合理,则土壤湿度靠近设定湿度值,应保持一定范围内的变化,系统状态应尽量保持稳定,ΔKp 调整方向为偏小方向,选择适中值的ΔKd、ΔKi。若偏差e(k)较小,则设定值土壤湿度较为接近,为了对系统容错性进行提升,应选择大一些的ΔKi、ΔKp 值。为对系统振荡情况进行避免,需要慎重对待ΔKd 的取值,通常情况下取中等大小[6]。
4.3 simulink 仿真
基于模糊比例积分微分控制器,运用Simulink 完成仿真工作,进而科学验证其可行性。由于土壤水势曲线非线性这一因素,土壤湿度会被众多外因影响,通过对文献资料进行查阅,运用土壤湿度基质变化率公式对变化函数进行反映。仿真分析单独PID 控制器,Kp 初始值为13,Ki 为0.5,Kd 为0.1,Kp 取值应在8~18 之间,Kd 取值为0~0.2,Ki 取值为0~1 时,具有良好的系统控制效果。Simulink 仿真响应时间短,超调量较小,对比单一的PID 控制器和模糊控制器,效果显著。
5 系统测试
5.1 系统通讯测试
举例如下:2 号从机为关闭状态,对灌溉状态进行检测时,对2 号从机状态的指令进行读取和发送。若土壤湿度值需要灌溉,没有达到设定值时,对2 号从机电球阀开启指令进行发送。若土壤完成灌溉,其湿度值达到设定值后,对关闭2 号电球阀指令进行发送。
5.2 节水灌溉测试
科学设定搭建工作结束的节水灌溉系统的土壤湿度为20%。某大型盆栽在进行实验过程中采用的方式为滴灌方式,将土壤湿度传感器插入土壤7 厘米以下,秒表计时一分三十秒。现场可编程逻辑控制器运用西门子S7-200SMART,对电磁阀进行驱动[7]。ST30 西门子S7-200SMART 的CPU 模块可集成以太网端口1 个以及RS485 接口1 个,可对现场无线传输端和主机发送的指令进行同时接收,支持TCP/IP 协议。S7-200SMART 中存在输出点12 个,输入点18 个,每个输出点均能够对一个电磁阀进行有效控制,在PCAccessSMART 现场集控计算机对西门子的OPC 服务器进行创建,在Labview 中对变量进行绑定,操作PLC的变量输出。基于此,为了有效实施远程控制,对PLC 和无线传输端间的地址映射进行建立,可通过对智能控制和手动控制自由切换的模式进行实现。对顺绿SLPGA 直流常闭电磁阀进行选择,作为应用的电磁阀,顺绿SLPGA 电磁阀功耗低,稳定性强,具有较高的灵敏度,其额定功率为4.5W,30m3/h 为最大流速,工作压力0.1~1.04MPa,额定电压12V,为了避免电磁线圈堵塞,可运用双重过滤,具有较好的耐久度。采用滴灌法作为灌溉措施,与施肥方式进行结合,可显著提升水分利用率,并增强肥料使用效果。
6 智能灌溉控制系统测试
对系统运行进行控制,各温室大棚作物最佳水势显示于现场集控计算机界面上,通过柱状图形式对水势进行实时显现,系统在无人干预的情况下也可进行决策。若开启某个大棚的电磁阀进行灌溉时,同时会亮起相应的状态灯,用户还可对灌溉停止或开始进行手动选择[8]。
7 结语
综上所述,本文基于我国设施农业智能灌溉的发展状况,将控制目标定为具有广泛适用性的水势土壤。LabVIEW 在模糊控制方法的基础上,对蔬菜智能灌溉控制系统进行设计,通过相关软件设计,对田间水势土壤远程监控、智能灌溉决策、无线传输数据、采集相关数据等功能进行实现。在未来研究中,应将相应无线通信模块,二氧化碳含量、光照、空气温湿度等传感器添加到系统中,对各种作物生长周期的模糊控制规则进行完善,对系统控制精确度进行提升,从而实现精准灌溉。
