机器人甲状腺手术的颈侧区淋巴结清扫
2022-01-05王甜甜谢秋萍
王甜甜, 谢秋萍, 王 平
(浙江大学医学院附属第二医院甲状腺外科,浙江 杭州 310009)
技术的发展始终在引领医学的进步,正如电刀、超声刀的出现之于外科手术。20世纪末开始,腔镜技术在外科手术中应用日渐广泛。分化型甲状腺癌(differential thyroid cancer,DTC)表现出区别于其他恶性肿瘤的3大特点——发病率迅速增长[1-2]、死亡率呈持平或下降趋势[1]以及术后病人生活质量需求不断增加[3]。因此,可实现个体化微创美容治疗需求的腔镜甲状腺手术应时而生。就颈侧区淋巴结清扫术而言,目前传统开放手术采用的颈部“低领式”或“L”形切口会在颈部留下较大的永久性瘢痕,手术创伤显著且恢复缓慢,给病人的心理、生理健康造成负担[4]。全腔镜颈侧区淋巴结清扫于2007年由本院甲状腺外科首次在国内开展[5],经10年余发展,逐渐成为成熟的颈侧区淋巴结清扫术。笔者认为,腔镜技术在颈侧区手术中的应用是腔镜甲状腺手术微创效应的最佳体现。始于2009年的机器人甲状腺手术凭借其独特的技术优势,对甲状腺颈侧区清扫术的影响将是广泛而深远。
机器人在颈侧区淋巴结清扫术中的应用现状
Kang等[6]于2009年首次采用腋窝径路完成达·芬奇机器人甲状腺全切除+淋巴结清扫术,标志着甲状腺手术正式迈入机器人时代。目前常用的达·芬奇机器人甲状腺手术径路主要包括双侧腋窝乳晕入路(bilateral axillo-bilateral areola,BABA)、无气腹单侧腋窝乳房入路(gasless unilateral axillobreast,GUAB)、耳后面部除皱切口、经口腔机器人甲状腺切除(transoral robotic thyroidectomy,TORT)的4个入路[7-9]。其中以BABA甲状腺手术最普及。BABA入路的优势在于与传统开放及腔镜手术相同,解剖视野更易被术者接受,方便实施甲状腺全切除及颈部淋巴结清扫。手术切口隐藏在双乳晕及腋窝皮下,隧道游离范围较小,隧道周围无重要的血管神经。瘢痕小而隐蔽,美容效果好。可提供机械臂的操作角度较大,能防止器械拥挤和互相干扰[10]。He等[11]于2020年报道260例经BABA入路完成颈侧区淋巴结清扫的回顾性研究证实,BABA入路可完成复杂的甲状腺颈侧区淋巴结清扫术,且手术安全性与开放手术无明显差异。另一项165例甲状腺乳头状癌(papillary thyroid carcinoma,PTC)病人行甲状腺全切除术+中央区颈淋巴结清扫术+单侧改良根治性颈淋巴结清扫术 (modified radical neck dissection,MRND),其中56例入机器人手术组,109例入传统开放手术组。该回顾性分析证明,机器人手术MRND有着与开放手术相似的并发症发生率[12]。
GUAB为Ⅱa、Ⅲ、Ⅳ和Ⅴ区淋巴结清扫术提供了清晰、充分的手术视野。然而,Ⅱb区淋巴结清扫术由于工作空间狭小和手术通道不足而非常困难。对于Ⅱb区淋巴结转移的病人,可能需额外的切口,如耳后发际(facelift)切口,以进入Ⅱb区域[13]。单侧腋窝双侧乳晕入路 (unilateral axilla-bilateral areola,UABA)是近年来以GUAB为辅、新发展起来的一种入路。分为3个小切口,1个在腋窝,2个在双侧乳晕。腋窝切口以前位于腋前线,而现在位于腋中线,使其更隐蔽[14]。UABA可能会成为清扫Ⅱb区淋巴结的新方法。
TORT是在经口腔甲状腺内镜手术(transoral endoscopic thyroidectomy,TOET)上逐步发展起来的。TORT是在口腔黏膜上切口,手术视野为从上到下,且操作臂距离过近,不利于颈侧区淋巴结清扫[15]。但最近报道的1例28岁女性,经TORT入路行甲状腺全切除、中央区淋巴结清扫术和涉及Ⅲ、Ⅳ区的选择性淋巴结清扫术,证明Ⅲ、Ⅳ区经口腔机器人选择性颈淋巴清扫术是可行、安全的[16]。
机器人甲状腺颈侧区清扫手术范围
需强调无论机器人或腔镜甲状腺手术,清扫范围、手术原则均须与开放手术一致。颈侧区淋巴结包括颈部Ⅱ区(颈内静脉淋巴结上区,主要包括颈深淋巴结群上组)、Ⅲ区(颈内静脉淋巴结中区,主要包括肩胛舌骨肌上腹以上的颈深淋巴结群中组)、Ⅳ区(颈内静脉淋巴结下区,主要包括颈深淋巴结群下组)和Ⅴ区(枕后三角区淋巴结或副神经淋巴链及锁骨上淋巴结,包括颈深淋巴结副神经链和锁骨上淋巴结群)淋巴结。对于颈侧区淋巴结清扫术,国内、外指南意见基本一致,不提倡预防性颈侧区淋巴结清扫,仅行治疗性清扫。原因是该区域转移率较低,且颈侧区包含许多重要组织。美国甲状腺协会(American Thyroid Association,ATA)指南指出,颈侧区清扫至少应包括Ⅱa、Ⅲ、Ⅳ和Vb区。为保护副神经,除怀疑有转移时,Ⅱb和Va区不需要常规清扫[17]。我国2017年的《分化型甲状腺癌颈侧区淋巴结清扫专家共识》[18]定义颈侧区淋巴结清扫范围为Ⅱ、Ⅲ、Ⅳ、和Ⅴb区。近年一些研究提出支持高危病人行预防性颈侧区淋巴结清扫的循证医学证据。一项206例PTC病人临床研究结果发现,颈侧区淋巴结转移112例(54.4%),其中12例(5.8%)跳跃性转移。作者认为预防性颈侧区淋巴结清扫有助于降低PTC病人的术后局部复发风险及术后疾病相关死亡率。因此,建议对于某些颈侧区淋巴结转移的高危病人,可考虑选择扩大手术清扫范围的积极治疗方式[19]。另一项对68例N1bPTC病人颈淋巴结转移率的分析显示,颈侧区转移率86.8%(59/68)。cN1bPTC病人颈侧区应常规同期清扫Ⅱa、Ⅲ、Ⅳ区淋巴结。在保证副神经功能的前提下,Ⅱa区或颈侧区≥2区域有淋巴结转移的病人需考虑清扫Ⅱb区淋巴结。有Ⅱ~Ⅳ区的多区域转移或原发灶肿瘤明显被膜侵犯的病人,需考虑清扫Ⅴ区淋巴结[20]。
机器人颈侧区淋巴结清扫技巧
本院甲状腺外科至今共完成机器人甲状腺手术270例。其中BABA入路266例,经口腔前庭入路3例,经颏口入路1例。BABA入路下颈侧区淋巴结清扫30余例。本院甲状腺外科有多年全腔镜颈侧区淋巴结清扫的经验,经过改良,将腔镜下七步法颈侧区淋巴结清扫应用于机器人。
腔镜下常用的颈侧区淋巴结清扫主要采用肌间入路,即胸锁乳突肌(sternocleidomastoid,SCM)胸骨头与锁骨头间隙清扫。又分为直接入路及间接入路两种方式。直接入路即先游离SCM胸骨头与锁骨头间隙,自下向上清扫。间接入路即先游离SCM与带状肌间隙,清扫Ⅲ区上淋巴结。随后游离SCM胸骨头与锁骨头间隙,自下向上清扫。腔镜清扫中,一般选择直接入路,有利于颈内静脉的定位与寻找。机器人清扫,首选间接入路。
第一步,打开颈侧区清扫空间。自SCM内侧缘及颈前肌群间隙[21]向上游离至下颌角。需注意皮瓣游离范围以建立足够的操作空间,上至颌下腺下缘和二腹肌后腹,外侧至SCM外侧缘。暴露颈内静脉中段,放置蓝色纱条带标记。随后沿SCM胸骨头与锁骨头间隙游离[21],显露颈动脉鞘,保护颈内静脉、颈总动脉和迷走神经。需充分利用器械。强调1把器械>1的理念,如2臂双极,可止血、牵拉和抓持;将1臂能量器械、2臂双极及3臂分离钳灵活配合,按需轮流发挥牵拉、分离、凝闭切割等功能。结合三维高清镜头,无需拉钩即可充分暴露颈侧区清扫视野(见图1),并达到精准的清扫效果。

图1 无需拉钩显露术野
第二步,清扫Ⅳb区淋巴结。完成胸SCM两个头间隙游离后,清扫Ⅳb区淋巴结。暴露肩胛舌骨肌,从上到下分离颈内静脉外侧缘,清扫Ⅳb区。推荐使用电剪刀分离,借助其EndoWrist功能,可轻松显露Ⅳb区下界静脉(见图2)。
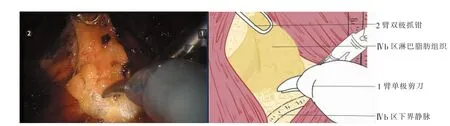
图2 Ⅳb区下界
第三步,清扫Ⅳ区锁骨上部。沿颈内静脉外侧向后分离,暴露迷走神经和颈横动脉。处理下界至锁骨下静脉区域,转向外侧至胸锁乳突肌外侧缘。Ⅳ区清扫的难点在于锁骨上淋巴脂肪组织清扫,尤其是静脉角的清扫。可将颈静脉角处肿大淋巴结术前超声引导下纳米炭标记,有助于下界淋巴结彻底清扫[22]。术中建议先游离Ⅲ、Ⅳ区交界处的淋巴脂肪组织,再向头端提拉,偏外上方。在静脉角处显露胸导管或淋巴导管(见图3)。此处需充分利用30°镜及镜头臂角度改善视野,借助EndoWrist功能达到更佳的操作角度及深度。对胸导管颈干与锁骨上干的交通淋巴管,尽可能用Hemolock夹闭以防术后淋巴漏。如胸导管或右淋巴导管损伤,必须结扎或用Hemolock夹闭。传统BABA入路中手术野与视点之间的距离较短,且视角较浅,术者较难进入锁骨附近的颈下部进行完整的淋巴结剥离。因此,Paek 等[22]通过垂直技巧(verticalizing maneuver,VM)将病人放置在20°~30°的头高位,镜头端口的枢轴点移动到前上方,从而消除颈下部的盲点,进而对Ⅳ及Ⅴb区进行淋巴结清扫。这是可借鉴的经验。

图3 显露胸导管
第四步,清扫Ⅲ、Ⅳ区及部分Ⅴb区淋巴结。从内向外,自下而上,沿颈横动脉浅层清扫Ⅳ区颈横动脉上部、部分Ⅲ区下及部分Ⅴb区淋巴结,显露C3和C4神经根。清扫时避免过深,以防损伤深面的膈神经、臂丛神经。合理应用能量器械,避免损伤锁骨上神经与颈横神经。清扫Ⅴb区淋巴结时,注意保护颈外静脉及副神经[23]。
第五步,清扫Ⅲ区上淋巴结。转向SCM及带状肌间间隙。将SCM上段牵向外侧。将已游离淋巴脂肪组织自SCM后方提出,完成Ⅲ区淋巴脂肪组织清扫[24]。暴露颈总动脉分叉,清扫Ⅲ区上淋巴结。清扫时注意自椎前筋膜浅面上行,避免损伤其深部组织。至Ⅲ区上后继续沿颈内静脉外侧缘向上游离,至显露二腹肌肌腹,避免损伤舌下神经。
第六步,清扫Ⅱa区淋巴结。沿颈内静脉外侧向上分离至二腹肌后腹,暴露副神经,清扫Ⅱa区淋巴结。注意保护脊副神经,层次需明确。自椎前筋膜浅面上行,显露C2神经根,避免损伤其深部组织。
第七步,清扫Ⅱb区淋巴结。机器人Ⅱ区清扫的难点在于副神经的显露与保护。以右侧副神经为例。首先以2臂双极牵开肌肉,3臂分离钳牵开颈内静脉,1臂超声刀或电剪刀沿颈内静脉外侧向上游离,至SCM中上1/3交界水平。向外侧寻找副神经。此时转为1臂挡开颈内静脉,3臂分离钳分离显露神经(见图4)。必要时3臂接神经监测仪辅助辨认。副神经显露后,换3臂分离钳向上外侧挑开SCM,2臂向下内侧牵拉淋巴脂肪组织,1臂能量器械清扫Ⅱb区淋巴脂肪组织(见图5)。在Ⅱ区清扫中,机器人手术拥有与普通腔镜手术相同的视野及清晰度优势。但操作过程的思路几乎完全不同。尤其是对熟练的腔镜术者而言,需改变普通腔镜的操作习惯,才可体会机器人的技术优势。强调单器械多功能的概念,充分利用EndoWrist可转腕器械的灵活度。暴露手术野的同时,完成精确清扫。笔者认为,机器人颈侧区淋巴结清扫过程中,2、3臂切换时机的准确判断,是机器人术者成熟的标志之一。

图4 显露副神经

图5 3臂挑开SCM和2臂牵拉淋巴脂肪组织
机器人颈侧区淋巴结清扫的长处与短处
与常规腔镜手术比较,颈侧区淋巴结清扫手术难度较大,对术者与扶镜手的配合度要求较高。机器人系统的稳定,术者亲自操控的高清镜头显著减少助手对学习曲线的影响,降低术中锁骨上、静脉角等困难位置显露的难度。且有研究表明,有腔镜操作经验的术者行机器人甲状腺腺叶切除及颈淋巴结清扫术优势更大[25]。另外,常规腔镜的镜头及操作杆无法弯折,在清扫Ⅳ区及Ⅴb区淋巴结时阻力较大。机器人系统由于具有可灵活弯曲的机械臂,在很大程度上克服该局限[26]。已有多项大样本临床研究证实,与开放手术相比,腔镜手术在Ⅱ区清扫中具有更佳视角、更好清晰度及放大作用的优势,可获得更佳的手术效果[27]。与常规腔镜手术相比,机器人系统在Ⅱ区淋巴结清扫中的优势,一方面来自更先进的技术,另一面则来自于术野显露理念不同。以器械代替拉钩,起牵拉作用的器械因其多自由度的活动度可更好地显露,或可在牵开肌肉同时提拉组织(见图6),达到更精细的清扫效果。与常规开放手术比较,机器人手术颈部无瘢痕的效果显著降低病人术后心理创伤[28]。腔镜器械的精细操作显著降低术腔创伤[29]。此外,机器人优于人手的机械臂稳定度及器械活动角度,使更精细的操作成为可能,尤其在淋巴管这类较脆弱且辨认困难的组织结构显露及保护上,优势明显。

图6 牵开肌肉同时提拉组织
无需回避,机器人系统虽在精细程度及灵活性上有优势,但缺点也是明显的。首先,颈部操作空间较小且解剖复杂。在进行低位淋巴结清扫时,由于机器人缺乏力反馈,在追求更佳显露视野的同时,可能对病人造成伤害。其次,尽管EndoWrist可转腕器械很大程度上改善低位清扫的操作盲区,保证清扫的彻底性,但由于镜头无法弯曲,锁骨下后方的视野盲区仍存在。第三,机器人触觉反馈较弱,在建立操作间隙的过程中易损伤颈内、外静脉及其属支,尤其是变异的血管神经结构。第四,对于颈部肌肉过于粗壮的男性,仍需置入腔镜拉钩辅助牵拉肌肉,较普通胸前入路腔镜手术创伤增加。第五,更危险的是,机器人对于术中突发情况的处理要慢于普通腔镜手术及开放手术[29]。如麻醉深度变化导致的病人体位突然改变、术中大血管损伤的紧急控制等。当然这与术者的技术、熟练程度及团队配合密切相关。
随着2019年以来达·芬奇机器人在全国各省数10家大型综合性医院装机,外科界对机器人技术革新的认知和认可日渐明确。机器人甲状腺手术包括机器人经口甲状腺手术的繁荣指日可待。机器人系统必将为我国全腔镜甲状腺手术适应证的扩展及手术精度的提高带来革命性影响。当下,是甲状腺手术发展的战国年代,也是技术思维迸发火花的轴心时代。在大数据的时代背景下,在风起云涌的手术编年史中,必须冷静思考机器人系统面临的考验。机器人相对较高的技术和设备要求,必然限制部分单位和个人开展。寻求同质化的疗效、规范化的培训体系、有效的准入机制,已成为业界共识,但仍举步维艰。笔者强调,即使到达机器人手术金标准的时代,也始终有义务帮助那些不确定自己应该做什么选择的病人,决定接受传统开放、腔镜还是机器人手术,须坚持医者仁心不变,坚持“治病第一、功能保护第二、美容第三”的原则。
