基于KUKA Sim Pro的喷涂机器人仿真研究与喷涂效果分析
2022-01-04魏雄冬
魏雄冬
(广东省机械技师学院,广州 510450)
随着“工业4.0”的不断发展和制造业全自动化的普及,制造业的制造过程变得越来越智能。很多环境恶劣、有害身体健康的岗位都已逐步被自动化设备代替,其中应用最多的当属工业机器人。工业机器人的应用场景很多,如焊接、打磨、搬运、码垛和喷涂应用等。在工业领域,喷涂一直应用广泛,特别是在汽车行业,但因为喷涂对人的伤害极大[1],会长期损害人的身体,从事喷涂的工人也越来越少,所以喷涂工作的自动化变得尤为重要。
喷涂工业机器人是一种用在工业领域的先进自动化设备,它能在工件表面均匀喷涂所需涂料。因为现在的工业机器人重复精度很高,所以得到的产品也可以达到很好的喷涂效果,而且喷涂机器人代替人工作业能够达到更高的工作效率。同时,它能适应有毒有害、易燃易爆、粉尘较多的工作环境,从而使工人在恶劣的环境中解放出来。
1 KUKA Sim Pro的喷涂功能
1.1 启用喷涂功能插件
KUKA Sim Pro虚拟仿真软件的喷涂功能在默认状态下没有打开,需要手动打开后才能使用[2]。使用时,在文件面板下的导航面板上选择“选项”,然后在选项下选择“附加”,即可看到喷涂插件。在喷涂过程中,需要完成以下操作之一:若要启用插件,则选择启用;若要禁用插件,则选择禁用。开启喷涂插件后,点击确定即可,无需重启软件。
1.2 喷涂功能介绍
打开喷涂面板,如图1所示。该面板由准备几何元、显示颜料、测量、删除颜料等部分组成。若要喷涂一个组件,需要为喷涂准备几何元、物料并选择表面,组件的几何元可镶嵌成想要的细节层次用于喷涂。

图1 喷涂面板
显示颜料功能选项中可以显示颜料的颜色和厚度。已准备好的组件物料由一个颜色映射表定义,该颜色映射表能够根据涂层厚度为几何元指定物料。通常来说,已准备好的组件没有颜料,因此,其物料就是映射到零颜料厚度的物料。除一些特殊情况外,当已准备的组件被另一个组件覆盖时,不会喷涂另一个组件覆盖的任何表面区域,而且已准备组件的细节层次会影响颜料印流,从而导致被遮掩区域的边含有一些颜料。通常来说,这种情况会在组件几何元的边过长时才会出现。另外,有些喷涂枪可能不支持环境光遮蔽,因此,被遮掩的区域仍然会被喷涂。
3D世界的渲染会影响颜料的显示,但不会影响其颜色,因此可以随时在不同颜色模式之间切换或在表面显示/隐藏颜料。在颜料面板上,若不想显示任何颜料,则选择“无”,若要使用颜色渐变显示颜料,则选择“颜色”,若要使用颜色间隔显示颜料,则选择“厚度”。
颜料厚度工具可用于测量和记录已喷涂组件上任何表面点上的颜料厚度。默认情况下,颜料厚度以微米(μm)为单位。在颜料面板上的测量组中,选择“颜料厚度”,然后在3D世界中完成以下操作之一:若要显示测量值,则指向一个已喷涂表面,显示结果如图2所示;若要记录测量值,则选择已喷涂表面上的一个点,这会为该测量点添加一个临时注释。

图2 显示测量值
2 喷涂系统搭建
2.1 喷枪工具选择
在KUKA Sim Pro仿真软件中,要使用喷涂功能,必须给机器人配置喷涂工具。喷涂工具可以从外部导入,也可以用软件自带的喷涂功能。因为外部导入的喷涂工具模型文件并不具备该软件的一些智能组件属性,需要自己重头到尾配置制作,使用起来较麻烦,所以一般会选择系统自带的喷枪工具。系统自带的智能组件喷枪工具有两种,如图3所示,其中一种是平行喷枪,另一种为带45°角弯曲喷枪,本文选择第二种进行系统搭建。

图3 喷枪工具
在喷枪工具属性中,Distribution Map用于通过位图定义距喷枪喷嘴不同距离的涂料分布,而Map Distances之间的分布是混合的,如果分布图是单个图像,则无论表面与喷枪喷嘴的距离如何,都将使用相同的分布,如图4所示。在模拟运行期间,喷涂枪会以动态的方式为已准备组件的几何元添加纹理坐标,这些坐标能够用于定义表面上颜料的厚度。因此,可以在3D世界中渲染之前或者之后更改颜料的显示。表面上颜料的显示方式有两种:一种是使用映射至颜料厚度值的渐变色,会将颜色混合并且像在真实世界一样显示颜料的应用;另一种是使用映射到颜料厚度值间隔的颜色,可以清楚地界定表面上的颜料厚度,如颜料厚度值为X的表面区域,其物料匹配规则为:X≤0,Y为白色;0<X≤0.5,Y为蓝色;0.5<X≤1,Y为红色。
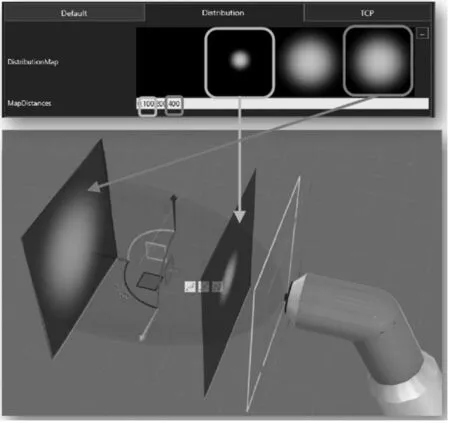
图4 喷枪涂料分布
2.2 搭建喷涂环境
喷涂环境由工业机器人、喷枪工具和喷涂目标物组成[3],由于需要做喷涂仿真研究,本文只搭建最简单的系统环境。首选,选择喷涂机器人,在所有模型搜索框中输入“KR 60L45-3”,选择“KR 60L45-3”机器人,并双击机器人加载到3D世界中。其次,找到Paint Gun喷枪工具,并将其加载到3D世界中,然后选择PnP工具,将喷枪安装到机器人法兰盘。在创建完工业机器人和喷枪工具后,要想通过机器人编程控制喷枪工具,需要将工业机器人的输入/输出信号和喷枪工具的输入/输出信号连接起来。再次,在程序视图下,勾选信号框,将机器人的“Out”信号连接到喷枪的“InSignal”信号,并将机器人输出口设置成101端口[4],如图5所示。最后,需创建目标物,在建模视图下,创建一个箱体几何元,并设定该几何元尺寸的长宽高分别为10 mm、1 000 mm、1 000 mm。
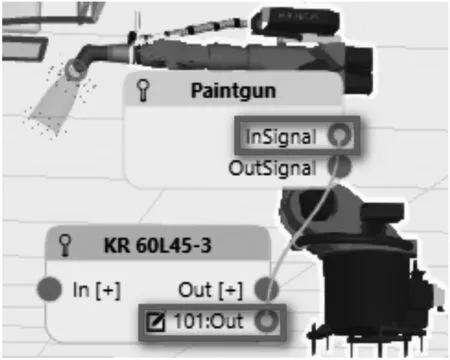
图5 机器人和喷枪IO信号配置
3 喷涂仿真编程
要完成喷涂仿真编程,除了编程机器人控制程序以外,还需选择喷涂目标物,并配置相关颜色、涂料等参数。本文以机器人走4个点的轨迹进行喷涂,以研究喷涂仿真效果。在涂绘视图下,先选择“为涂绘准备组件”,并选中组件为喷涂目标物,然后设置最大边长为50 mm,并选择“准备选中的组件”,之后选中喷枪,在喷枪组件属性面板中,根据需要设置相应参数。示教喷涂点P1、P2、P3、P4如图6所示。

图6 示教喷涂点
上述操作完成之后即可编写涂绘程序,此时要先规划机器人运动轨迹[5],使机器人回原点,移动到P1点后,打开喷枪,移动到P2、P3、P4点后关闭喷枪,确保机器人最终回到原点,程序如图7所示。若要达到理想的喷涂颜色,还需配置喷涂效果、颜色、厚度等参数。在颜色设置下,选择“编辑颜色映射图”工具,设置有色颜料显示。机器人喷涂完成后最终显示的颜色取决于有色颜料的设置。除此之外,还需设置厚度颜料,这需要喷涂后根据不同的颜料厚度显示不同的颜色,在对喷涂厚度有需要的应用场所,此参数的设置非常必要。
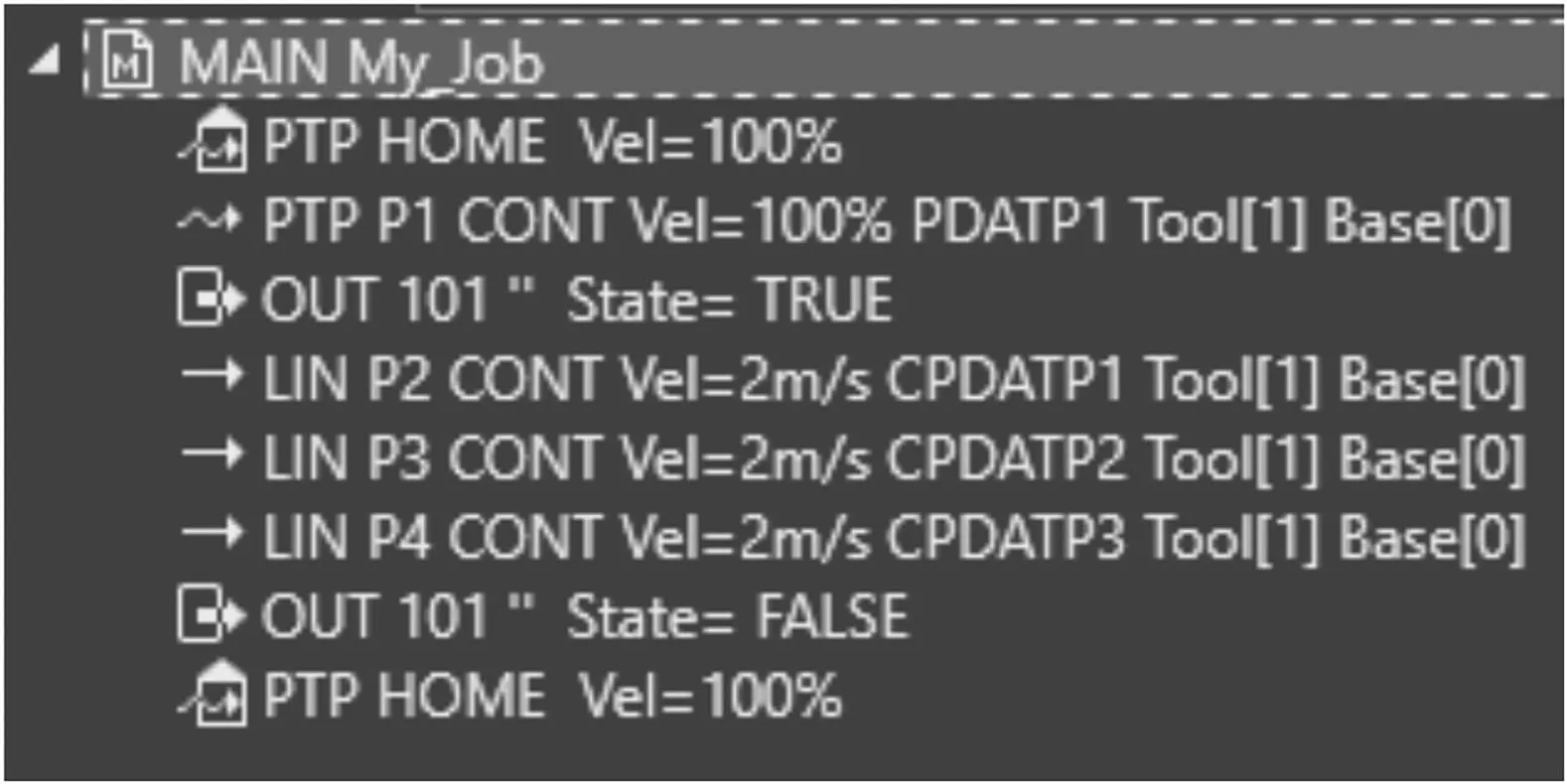
图7 喷涂测试程序
有色颜料和厚度颜料的设置如图8所示,将有色颜料显示范围设定为0~250,厚度颜料显示范围设定为0~200,且都分为6个阶段,以此为基础开始做喷涂实验。颜色配置完成后,启动系统,使机器人按照喷涂轨迹行走,最终的喷涂颜色效果如图9所示,从图9中可以看出,越靠近喷涂中间颜色越深,越靠近喷涂边沿,颜色越浅。除了看到厚度的颜色显示,还能在不同的颜色上通过鼠标左键,测量不同颜色厚度值,如图10所示为不同厚度颜料区域对应的厚度值。
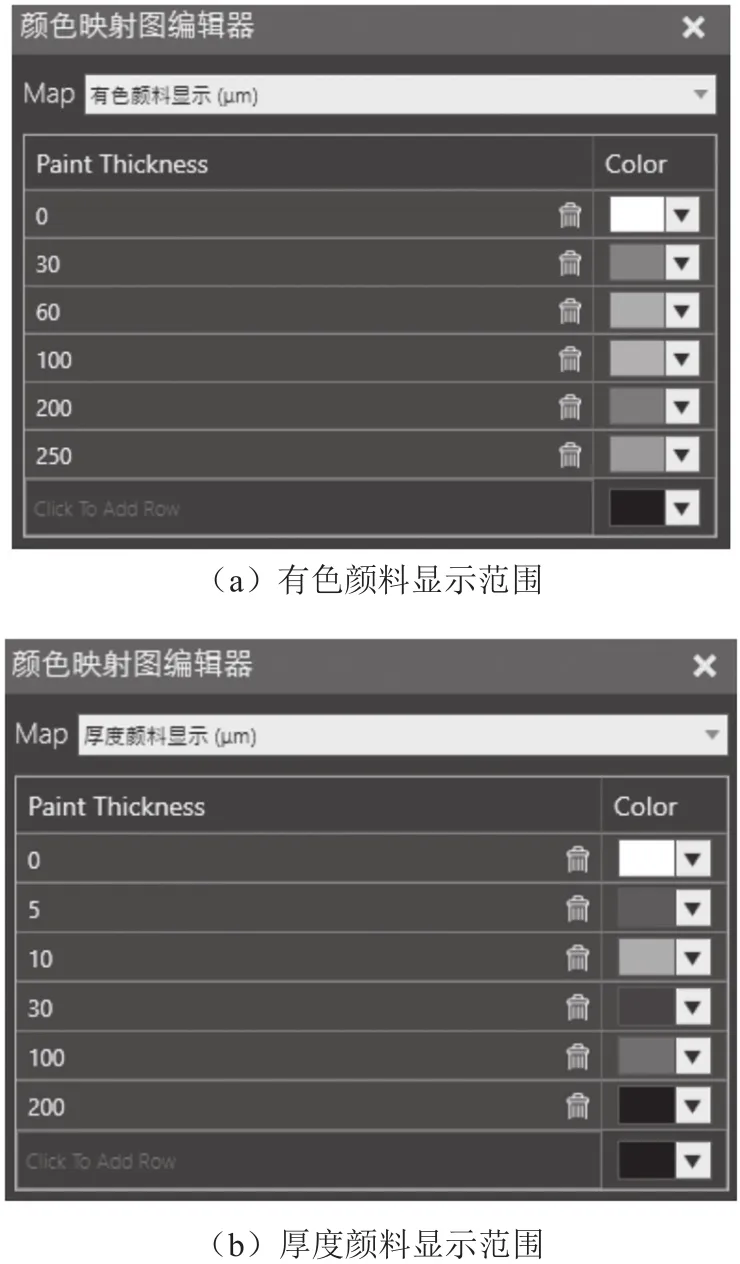
图8 喷涂颜色设置
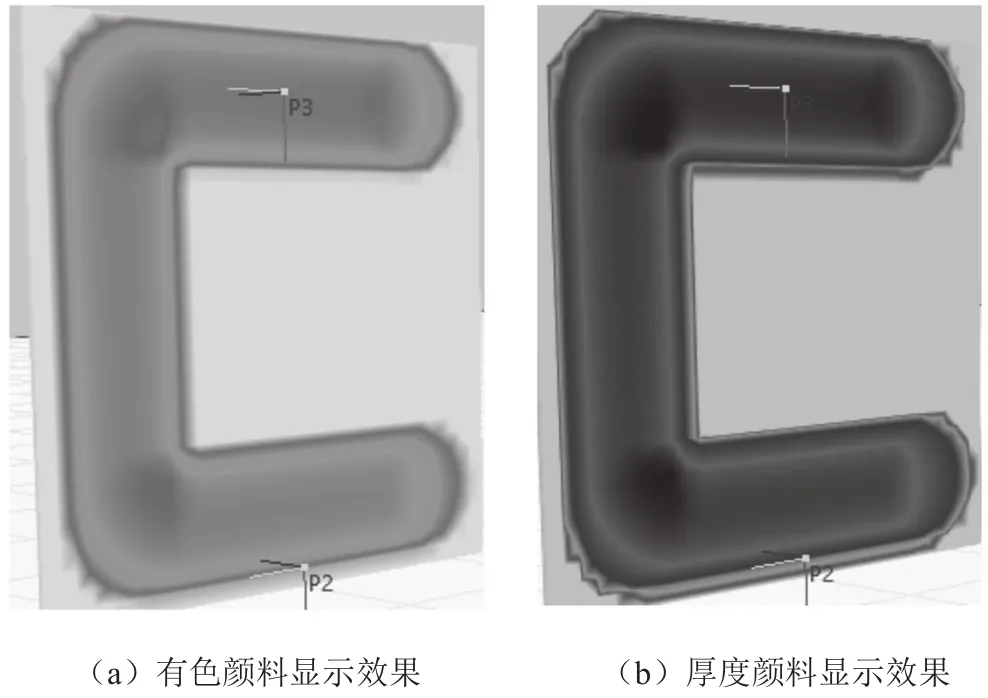
图9 喷涂颜色效果显示

图10 喷涂厚度颜色对应的厚度值显示
4 喷涂效果分析
当喷枪打开时,每秒钟都有限定的涂料量分布到目标物表面,此时涂料体积等于喷枪流量乘以喷枪效率,如喷枪流量为1 cm3·s-1,喷枪效率为100%时,则涂料体积为1 cm3,这个体积分布在喷枪的锥形区域中,其面积S的计算方式为:

式中:X、Y分别为X向和Y向的喷雾直径。
例如:喷枪属性中X的参数值为300,Y的参数值为300,则锥形区域面积为70 686 cm2。因为喷枪使用的是椭圆形作为喷漆区域,所以分布图上的涂料密度应在圆形区域内。
若分布图为全白色,则分布到表面的涂料厚度L应为体积与面积之比,例如:油漆体积为1 cm3·s-1, 面 积 为 70 686 cm2, 则 涂 料 厚 度 为0.001 41 cm。因为分布图的实际分辨率会影响计算中每个“像素”的总涂料量,所以分布图的分辨率会稍微影响厚度结果。若分布图不是“全白”,则需要根据图的像素值将涂料量分配到非黑色区域。因此,一个100%的白色像素将会比上述示例获得更多的涂料。
通过在地图上累积“白色”的总量来计算每个地图的饱和度,然后,将总的地图绘制区域除以该值以获得该地图的饱和度乘数。因此,总厚度为体积与面积的比值乘以像素值和饱和度。因为每秒喷射的涂料量相同,所以一个较小的分布图/区域会比一个更大的分布图产生更厚的涂料布局。另外,由于分布图混合在地图距离之间,频率会影响涂料的效果,机器人移动速度越快,就需要越多的样本,如图11所示。当涂料量相同时,表面角度(法线)与喷枪喷嘴角度之间的关系是通过增加表面积来影响涂料厚度,但此时涂料粒子的距离也可能会变化,并且不同的涂料粒子可能会使用不同的分布图。

图11 机器人移动速度喷涂效果
5 结语
通过对KUKA Sim Pro虚拟仿真软件的喷涂功能进行研究,首先,研究了仿真软件的具备的喷涂功能。其次,通过软件特有的智能组件以及软件自带的喷涂工具,在虚拟环境下搭建一个喷涂仿真系统。再次,通过模拟现实喷涂仿真,来验证该软件特有的涂绘功能,再细化到每一个参数,并研究了每一个参数的变化给喷涂带来的影响。最后,研究了喷涂涂料的用量、喷涂的颜色、涂料的厚度、喷涂面积等参数,实现了参数的合理控制,为实际智能制造节约了成本,并减少了现场调试的工作量。
