伸缩式三自由度并联平台运动学及仿真分析
2022-01-04赵海彬
赵海彬 徐 冬
(江苏安全技术职业学院,徐州 221001)
串联机构是一种开链结构,要实现空间运动至少要3个自由度,各种串联机构如图1所示,其中,直角坐标平台可以由X、Y、Z轴3个移动副实现其空间运动,这种平台结构简单、精度高,但因各轴需依次运动,工作速度受限;关节型机构平台可以由平移、旋转和回转3种运动副实现其空间运动,该机构平台实际上是类人手臂机构,能有效满足于空间各种姿态,同时其工作范围大,易于控制,应用场景较广泛,如焊接、搬运、码垛、装配等领域,但因为其驱动力在其关机处,要想获得大的工作空间,必须有足够的臂展,所以其运动惯量较大,很难满足重负载、高速度下的操作[1]。

图1 关节型机构
并联机构是由两个或两个以上独立运动链连接的动平台与静平台机构,其运动链需要共同作用于动平台,才能完成动平台的运动[2],这种机构在机构学上属于多回路闭环机构,典型的Gough-Stewart平台并联机构,如图2所示。并联机构的诞生,成为了机构学界研究新的方向和热点。因为并联机构由多个运动链组成,所以其结构稳定、刚度大。相对于串联机构而言[3],并联机构的驱动装置设置在机架上,能够减小运动的负荷,且运动速度及动态性能比较好。另外,并联机构的运动学反解易求出,因此受到了学术界和产业界的关注。

图2 Stewart并联机构平台
并联机构中运动链的实现形式主要是转动副和移动副,其中移动副主要靠伸缩杆的杆长变化来调整动平台的姿态,如电动推杆,其上下端采用铰接,由推杆伸出或缩回改变杆长。本文主要研究伸缩式三自由度并联运动平台,并进行运动学分析和仿真验算。
1 伸缩杆式3-DOF并联平台运动学分析
机构的运动特性研究主要分为运动学正解和运动学反解,其中运动学正解的求解较难,主要方法有数值法和解析法,本文主要采用解析法进行机构的运动学求解[4]。如图3所示的3-DOF并联机构平台包括固定平台OAB、动平台O´CD,他们之间使用移动副P6、P7、P8进行铰接。
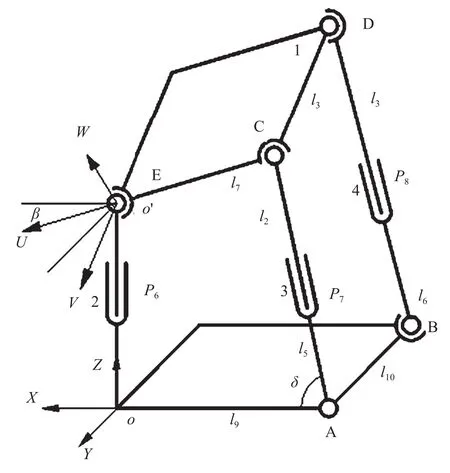
图3 机构运动简图
如图3所示,在下端固定平台上建立静坐标系o-XYZ,使得原点o与移动副P6的下端重合,X轴与固定平台的边oA重合,Z轴与线段oP6重合。在上端动平台上建立相应的动坐标系o′-UVW,原点o′与球副E重合,U轴与线段CE重合,W轴垂直于上平台平面CDE[5]。由o-XYZ至o′-UVW的坐标变换过程为:o-XYZ沿Z轴上升l1+l4成为o1-X1Y1Z1,再绕Y1轴逆时针转过β角成为o2-X2Y2Z2,最后绕X2轴逆时针转过α角成为o′-UVW(中间坐标系图上未标出)。
令移动副P6、P7、P8的输入量分别为l1、l2、l3,为方便计算,设上、下平台均为长方形,且上平台的边长CD和CE分别为l7和l8,下平台的边长OA和AB分别为l9和l10,7为X轴与线段AC的夹角。
1.1 运动学正解
以正解的方法求解时,已知l1、l2、l3,求z、α、β。由图3可知:

由平面回路oP6ECP7A,可得如下关系式:

整理得:Asinβ+Bcosβ+C=0,即:

由机构运动的几何等同条件可知:

记 sα=sinα,cα=cosα,sβ=sinβ,cβ=cosβ,由坐标变换可得,S7点的绝对坐标为:
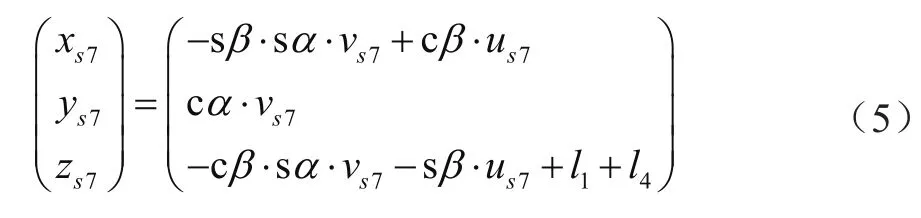
而S8点的绝对坐标为:

将S7、S8点的坐标代入式(4)有:
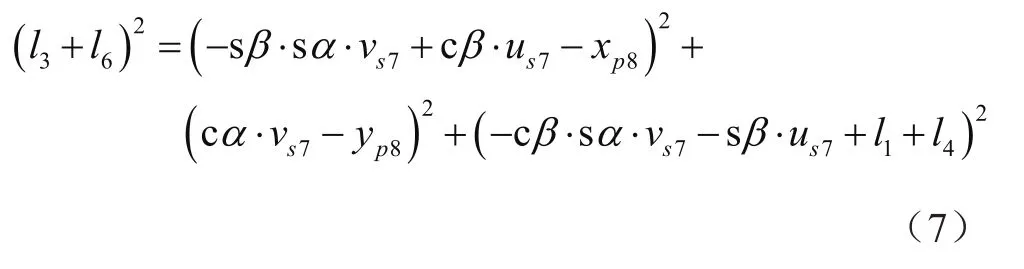
整理得:
解得:

式中:D=2sβ·xp8·vs7-2(l1+l4)·cβ·vs7,E=-2vs7·由式(3)和式(8)知,α、β各有2个解,因此共有4个正解。
1.2 运动学反解
以反解的方法求解时,已知z、α、β,求l1、l2、l3。由图3可知:

由式(2)可得:

由式(7)可得:

因此,该机构只有一个反解。
综上所述,该机构具有4个正解、1个逆解,由正解表达式可知,输出变量关于输入变量的函数关系为:z=z(l1)、β=β(l1,l2)、α=α(l1,l2,l3),即此机构具有典型的三角化解耦性,对应于完全解耦,表明机构解耦程度很高,其运动学分析较易,对控制十分有利。
2 仿真分析
运用MATLAB软件对伸缩杆式3-DOF并联子平台的运动学特性进行仿真,其机构样机的结构参数如下:上、下平台长方形的边长l7=l8=300 mm,l9=l10=600 mm;定长杆l4=l5=l6=200 mm。
若伸缩杆式3-DOF并联子平台需要完成两种运动:第一,保持动平台的姿态不变,并且假设两个绕坐标轴的旋转角度分别为α=0°、β=65°,现使动平台上S2铰链点的高度z由600 mm变化至1 300 mm,则3根伸缩杆的长度随着高度z的变化如图4(a)所示;第二,保持动平台的姿态不变,并且假设两个绕坐标轴的旋转角度α=65°、β=0°,现使动平台上S2铰链点的高度z由600 mm变化至1 300 mm,则3根伸缩杆的长度随着高度z的变化如图4(b)所示。

图4 伸缩杆式3-DOF并联子平台机构运动仿真图
3 应用案例
依据前文中的运动学分析及仿真验算,设计了一款三自由度并联机构平台,该平台由3支伺服电动缸、上下各3只万向铰链(虎克铰)和上下2个平台组成,如图5所示。其中下平台固定,借助3支伺服电动缸的伸缩运动,能够完成平台在空间3个自由度(X、Y、Z、α、β、γ)的运动,从而模拟出各种空间运动姿态。

图5 三自由度并联机构平台
该三自由度并联机构平台既可以应用于各种训练模拟器,如飞行操纵模拟器、舰艇操纵模拟器、直升机操纵模拟器、坦克操纵模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感影院、娱乐设备等领域,又可以用于各种汽车姿态测试设备以及飞行器的飞行姿态测试设备,甚至是空间宇宙飞船的对接和空中加油机的对接等设备[6]。同时,利用三自由度精严密定位机构,可以做成高刚度、高精度的三自由度加工机械和装配机械手,如三轴并联机床和并联机器人,以及各种复杂的特种加工、复杂装配等。
4 结语
本文通过对伸缩杆式3-DOF并联平台进行运动学分析,求解出了该机构平台的运动学正解和反解表达式,之后通过对该机构平台进行仿真分析,证明了该机构平台的合理性。该机构的适用范围较广,可以做成高刚度、高精度的三自由度加工机械和装配机械手等设备。
