石油化工自动化仪表故障诊断方法研究
2021-12-31王拥军
王拥军
(中石油乌鲁木齐石化公司计控部,新疆 乌鲁木齐 830019)
石油化工行业由于生产环境的限制,难以满足大规模的人员安置需求,但由于其自身的生产量相对庞大,对设备的运行状态提出更高的要求。面对这一问题,自动化技术的介入有效改善了石油化工的生产模式,以及其代替人工的操作方式大大提供了生产效率,并减少了对人员的使用数量。但随之而来的也出现了新的问题。虽然已经实现了对设备的定期维护与检查,但出现故障仍是不可避免的,长期停产维护设备对企业造成了不小的经济损失,由此,如何实现准确高效的设备故障检测成为现阶段专家学者研究的重点。其中,杨军以PLC为操控中心,进行了电气自动化仪器仪表故障检测的相关研究,实现了对故障的准确检测,但耗时较长,且对故障位置的定位存在一定偏差;冯子恒等人就石油化工企业自动化仪表故障的预防措施进行了深入研究,并提出了具体的维护方法,有效降低了仪表故障的发生频率,但对于已经出现的问题,缺乏明确的研究。为此,本文提出了石油化工自动化仪表故障诊断方法研究,以期为相关领域的维修工作提供参考。
1 石油化工自动化仪表故障诊断
1.1 故障信号VMD分解
传统故障诊断方法存在误差的主要原因是故障信号的分析受干扰信号的影响,导致分析结果出现偏差,影响最终的诊断结果。为了避免该问题,本文采用VMD对故障信号进行分解,在分解过程中将故障诊断问题转化为变分信号的求解问题。为此,本文将其分为构造和求解两个过程。
构造的目的是明确仪表在不同状态下的正常运行参数范围,本文定义其为仪表的模态,用K表示,将故障信号的规范控制在K内,假设每个模式的中心工作参数为有限带宽值,则每个模式的估计带宽之和通过K个模态函数uk(t)最小化,即可实现对仪表正常状态参数的判断。但需要注意的是,模态函数uk(t)需要满足所有模态之和等于输入信号的约束标准。具体步骤如下:
首先,对故障信号进行Hilbert变换,得到不同负荷状态下对应的模态函数uk(t),实现对信号的解析处理,此时输出的信号形式为单边频谱:

其中,γ表示Hilbert变换后故障信号的单边频谱,j表示仪表的运行负荷状态,t表示故障信号采集的时间,φ(t)表示仪表正常状态下t时刻的运行参数。
在得到故障信号的单边频谱后,需要计算自动化仪表的基础参数基带范围,考虑到解析信号为非固定模态的结果,本文通过预估中心参数值实现该过程,其可表示为:

对应的约束条件为:

其中,f表示采集到的信号总量。
通过这样的方式完成对故障信号的拆解,并构造出以单边频谱为基础单元的信号形式。
1.2 故障诊断
在完成上述操作后,既可以对VMD拆解后的故障信号进行诊断,即对变分问题求解。为了最大限度干扰信号对诊断结果的影响,本文在计算过程中引入二次惩罚因子α,并借助拉格朗日乘法算子λ(t)对计算范围进行约束,将约束性变分问题转化为非约束性变分问题,降低计算的复杂程度。
首先,利用二次惩罚因子对分解后的故障信号约束,实现对高斯噪声的过滤处理,其可以表示为:

其中,γ′表示过滤后的故障信号。在此过程中,拉格朗日算子主要负责保持约束条件的严格性。
以此为基础,对石油化工自动化设备故障诊断的步骤如下:
(1)首先按照仪表的出厂参数设置,对故障类型进行划分,在参数齐全的状态下对可以表征故障类型的信号特征进行提取,并将其作为故障诊断的依据;
(2)将采集的故障信号进行VMD分解后,将与表征故障类型信号特征相似的单边频谱信号作为仪表的输入信号,在与被测仪表运行环境近似的条件下对故障征兆数据转化,计算对应的故障征兆在不同故障类型下的支持度;
(3)再对分解后的信号进行去噪过滤处理,同样重复上述操作,并统计其输出的故障类型匹配结果是否与原结果一致,如果一致,则可将其作为最终的故障诊断结果;如不一致,则需要重新在仪表中输入降噪后的信号,再次采集对应的干扰信号,并重复步骤(1)和步骤(2)的操作,直至结果一致。
2 试验测试
将本文提出的故障诊断方法应用于实际的生产环境中,并将文献[3]和文献[4]提出的方法作为对照组。通过分析三种方法对故障的诊断结果,客观评价本文提出方法的应用价值。
2.1 模态的选取
本文实验重点以自动化电气仪表的故障诊断为目标,选用美国凯斯西储大学电气工程实验室的仪表振荡数据作为实验数据。其中,电机传动仪表终端的6205-2RS SKF端口介入有0.1775mm的故障点。仪表具体的参数设置为:负荷为0状态下仪表运转速度为1797r/min、负荷为1状态下仪表运转速度为1772r/min、负荷2状态下仪表运转速度为1750r/min,负荷为3状态下仪表运转速度为1730r/min。实验按照12kHz的采样频率对仪表的运行参数进行采集,并定义模态数为K,在不同负荷状态下,以仪表中心的运转速度为模态区分的依据。为了使诊断结果更加直观,本文以正判率作为评价指标,其计算方式为:

其中,P表示正判率,tr表示故障诊断准确的次数,t表示输出的总判断总数。
2.2 结果分析
在上述基础上,对三种方法的诊断结果进行统计,其结果如表1所示。
从表1中可以看出,在不同负荷状态下,三种方法诊断结果的正判率均出现了一定程度的下降,这是因为随着仪表运行负荷的增加,由于其自身的振动、延时等问题带来的干扰作用逐渐加强,因此三种方法对0负荷状态的诊断结果最为准确。但相比之下,本文方法的诊断效果相对稳定,始终稳定在95%以上,具有较高的应用价值。
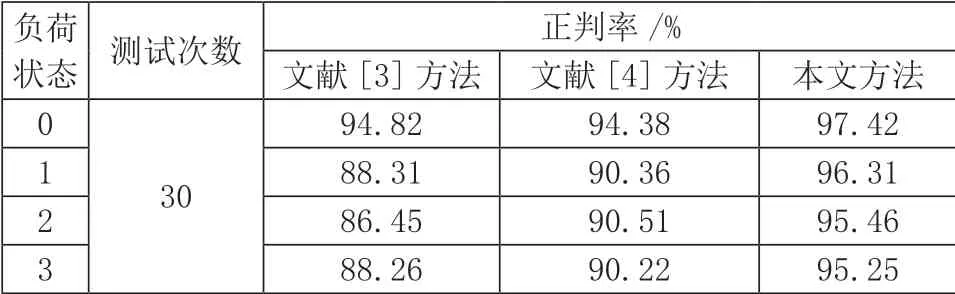
表1 不同方法的故障诊断结果
3 结语
石油化工行业的蓬勃发展决定了其自动化程度将会越来越高,在此背景下,如何实现对自动化设备故障的有效诊断成为确保设备稳定运行的关键。本文提出石油化工自动化仪表故障诊断方法研究,对故障诊断结果的准确率达到95%以上,具有良好的应用效果。通过本文的研究,以期为石油化工行业自动化设备的故障诊断工作提供有价值的参考。
