基于逆向调制反射器的星间激光通信系统设计
2021-12-31贾艳梅吕从民申鹏飞
贾艳梅, 吕从民, 申鹏飞, 路 璐*
(1.中国科学院大学, 北京 100049; 2.中国科学院空间应用工程与技术中心, 北京 100094)
1 引言
微小卫星编队为军民两用的导航、通信、遥感和科学研究等提供了可能,可用于重力测绘、跟踪森林火灾、寻找水源等方面。 通过星间链路把多颗小卫星互联在一起形成快速响应、信息共享及实时数据交换空间通信网络,可有效综合利用每颗卫星的信息,是编队小卫星星间协作的一项关键技术[1-2]。 微小卫星集群可提供低延迟、低成本、高速度和高可靠服务。
空间激光通信具有无频率资源限制、宽带宽、高速率、抗干扰的特点,成为未来小卫星星间、星地链路的重要途径[3-5]。 微小卫星要求载荷具有低SWaP(Size,Weight and Power)值,星间激光通信相对较低的SWaP 值适用于微小卫星星间、星地数传需求。 微小卫星间通过激光通信方式进行互联,可构建激光通信网络。 世界各国都在大力发展适用于微小卫星互联的激光通信终端,如OCSD[6-7],ClICK[8],VSOTA[9],FITSAT[10]及国内航天科工集团行云T5。 但这些小型激光通信终端高度依赖于小型卫星平台完成指向,需要复杂的光机设计和实时修正光轴摆动偏差,并且不能满足激光通信网络一点对多点的通信需求。
激光逆向调制反射技术是一种非对称激光通信链路,与传统激光通信不同的是,逆向调制反射器(Modulated Retro Reflector, MRR)仅需要一端的瞄准捕获跟踪(Pointing, Acquisition and Tracking, PAT),另一端是角反射器或具有猫眼效应的逆向调制反射系统[11-12]。 逆向调制反射器较传统激光通信终端具有更低的SWaP 值,相对微波通信可提供更高速率,对卫星平台本身的要求不高。 利用逆向调制反射器阵列,可实现一点对多点的通信。 美国喷气推进实验室正在研发基于MEMS 调制反射器的全天空覆盖卫星间全向光通信器(ISOC)[13],将在自由空间200 km 距离内实现高达1 Gbps 的数据速率,适用于微小卫星。
光学调制反射器可使用各种被动式反射镜,包括角立方棱镜和猫眼透镜[14]。 电光调制器可放置在光学器件前面的窗口处,或结合到光学器件中,具有多种形式,包括振动膜[15]、液晶[16]、微型机电系统(MEMS)[17]和半导体多量子阱(MQW)[18-19]。
本文针对编队飞行小卫星星座内低SWaP 值小型激光通信终端设计需求及高速率激光通信互联需求,提出基于MRR 的星间通信架构,通过性能分析,评估方案合理性。
2 基于MRR 的星间组网通信方案设计
微小卫星网络网络示意图如图1 所示。 基于激光逆向调制技术的微小卫星自由组网拓扑结构以一颗或多颗主卫星为网络节点,主卫星上安装带有跟瞄系统( Pointing, Acquisition and Tracking,PAT)的传统激光通信终端,通过多个光学天线或者文献[20]所述一对多激光通信设备与子卫星进行通信。 子卫星上安装双工猫眼调制反射器阵列。 主卫星作为询问端,子卫星作为被动端,通过主卫星向子卫星发射带有信息的询问光,子卫星在询问光上调制信息并反射回主卫星。各子卫星与主卫星的距离视任务需求而定,各子卫星与主卫星间可以快速动态接入或退出,根据任务要求进行快速动态拆分和重构。 该网络拓朴结构能够适应瞬息万变的空间态势和任务。
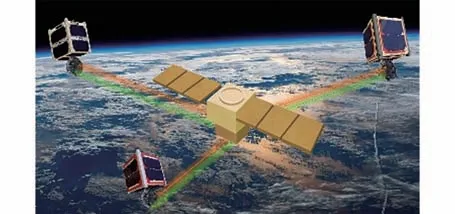
图1 微小卫星网络示意图Fig.1 Microsatellite network topology
微小卫星编队进行多点间激光通信可满足卫星群内保密、实时通信需求。 编队飞行小卫星整体运动轨迹固定,群内卫星相对间距较近,动态变化。 微小卫星群内通信的基本链路组成为搭载一对多主光机端的主卫星,搭载调制反射器的子卫星。 主卫星与子卫星间采用双工调制反射通信方式。 主卫星与子卫星之间构成的双向中继通信系统链路如图2 所示。
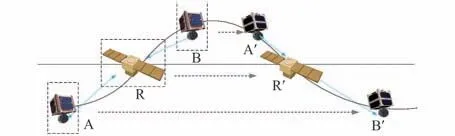
图2 主卫星与子卫星双向中继通信系统示意图Fig.2 Schematic diagram of two-way relay communication system between main satellite and sub-satellite
猫眼调制反射器相对角反射器可在更小尺寸达到更高速率,猫眼调制反射器集成为阵列可以等效为更大的孔径。 多量子阱理论速率可达到4 Gbps,但是多量子阱调制速率与RC常数相关,RC常数与调制器的面积有关。 调制反射器的选择需要在能够接收足够光强的光学口径和调制器面积增大带来RC常数衰减之间进行平衡。 文献[12]中基于MEMS 的调制反射器可达到1 Gbps的速率。 本文假设采用基于MEMS 的猫眼调制反射器。
基于逆向调制反射器的星间激光通信原理如图3 所示。 主卫星向子卫星发送连续问询光,子卫星将发送数据调制到连续问询光上,形成信号光反射给主卫星。
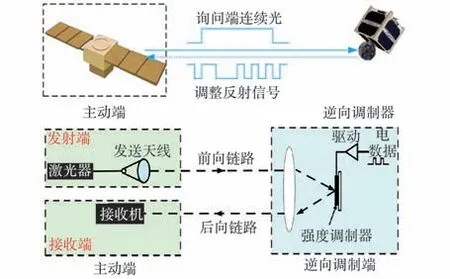
图3 基于逆向调制反射器的主卫星与子卫星通信原理图Fig.3 Schematic diagram of main satellite and subsatellite communication based on modulated retro reflector
3 基于MRR 的星间通信方案系统模型
3.1 传输方程
根据常规自由激光通信传输方程可得出调制反射器链路传输方程。 在发射机和接收机相关项的基础上增加调制反射器天线增益、光学损耗、调制效率。 由于光信号往返传输2 次,因此空间距离损耗出现2 次。 调制反射链路相比传统激光通信链路的距离损耗更大,以1/R4而不是1/R2衰减[19]。 对于给定的调制反射器天线增益和调制效率,调制反射器传输方程可以表示为式(1):

其中,Psig为主星接收到的调制反射器信号功率,PLas是发射激光功率,GT为询问端发射天线增益,LT为发射天线损耗,LR为自由空间距离损失,Tatm为大气传输损耗,GMRR为调制反射器的光学增益,LMRR为调制反射器的光学损耗,M为调制反射器的调制系数,Grec为询问端接收机的光学天线增益,Lrec为接收机的光学损耗。 由于拟使用调制反射器建立星间链路,因此不考虑大气损耗。
考虑采用开关键控(On-Off Keying, OOK)调制格式,强度调制/直接检测(Intensity Modulation with Direct Detection,IM/DD)方式完成信号收发,信号模型可表示为式(2):

其中,y表示接收到的信号,η为接收机的光电转换效率,h代表信道状态,x∈{0,1}表示二进制信号,n是方差为σ2复杂零均值高斯过程。 对于h,应考虑前向询问链路和返向调制反射路径的信道状态,由于MRR 系统仅一端有PAT 系统,因此仅考虑前向询问链路中指向误差的影响。
3.2 指向误差概率分布
星间通信为真空链路,不像大气、水或其他介质中存在确定的信道衰减系数,因此仅考虑由于指向错误(Pointing Error,PE)造成的几何扩散进行建模的随机过程。 本文采用通用的指向误差概率分布模型,随机变量的概率密度方程可描述为式(3)[21]:
3.3 瞬时信噪比概率分布
3.4 中断概率模型
中断概率是通信系统接收信号信噪比低于指定阈值的概率,可由式(5)计算。
其中,Pr{γ≤γth}表示γ≤γth的概率。
3.5 误码率模型
平均误码率的计算公式如(6)所示。

其中,Pe是瞬时误码率,在已知信道瞬时状态信息条件下,对于NRZ OOK 调制信号,误码率公式为式(7)[22-23]。

其中,ε与系统的最优判决门限相关[11],将(7)代入(6)可得式(8)。
4 数值仿真及结果分析
4.1 链路预算
喷气推进实验室报道的MEMS 调制反射器最高速率可以达到1 Gbps, 星间传输距离200 km[12]。 依据当前技术水平,参考文献[24],开展链路预算,结果见表1。 从表中分析的结果可知,系统的安全裕量为3.75 dB 左右,满足3 dB安全裕量要求。 从分析结果可以看出,引起链路损耗的主要因素是距离。 增大调制反射器及主动端接收天线的孔径可增加天线增益。 激光束散角越小,发射天线增益越高。 若采用调制反射器阵列,增加收发天线个数,等效为增加调制反射器天线孔径,可进一步改善系统性能。 波长对距离损失及天线增益会产生影响。 考虑到调制反射器天线增益为与λ-4成正比,本文选择波长相对较短的850 nm 波长。
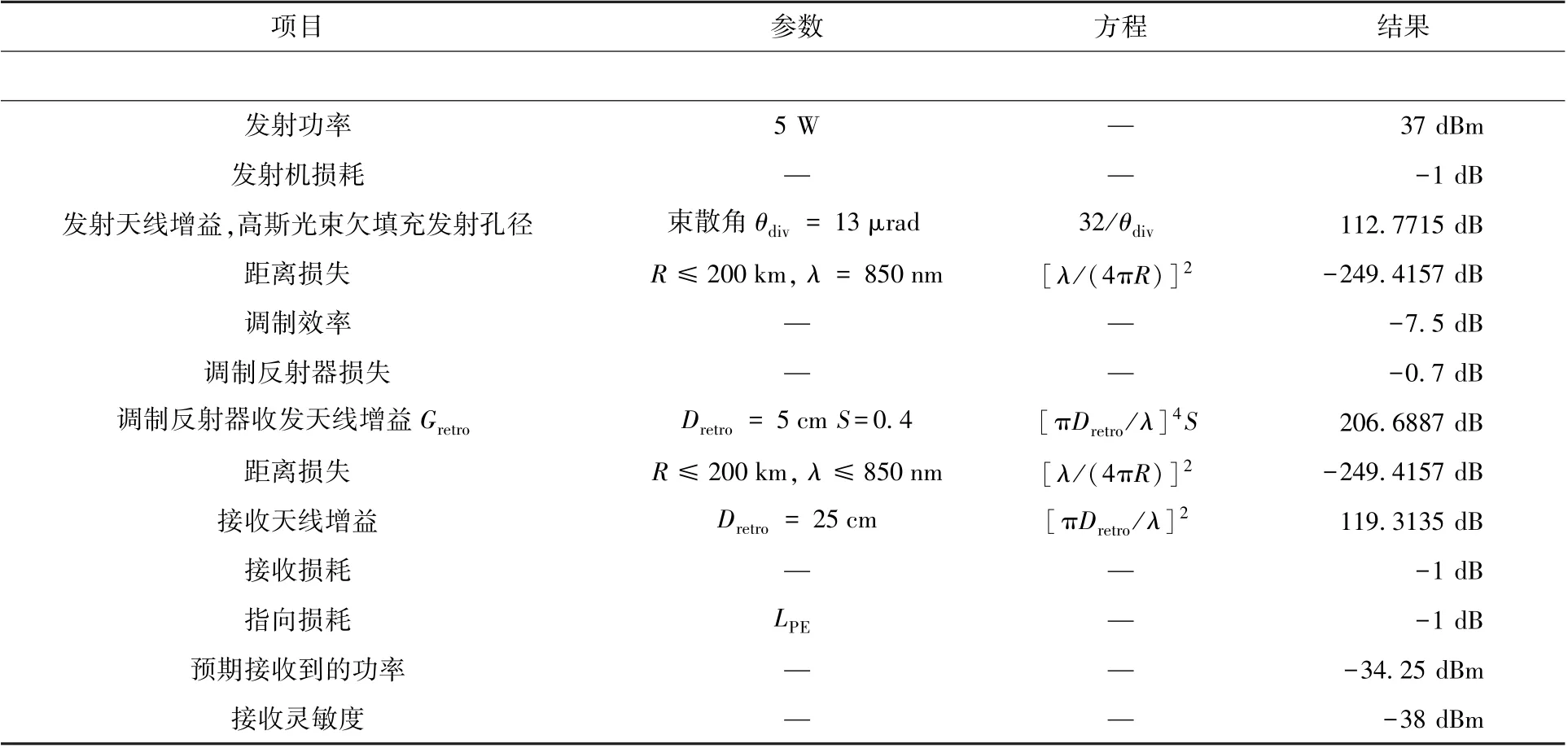
表1 链路预算Table 1 Link budget
实际应用中,根据实际通信场景需求,对发射功率、束散角、收发光学天线孔径、波长进行合理设计。 设计仿真所用其他参数如表2所示[20]。
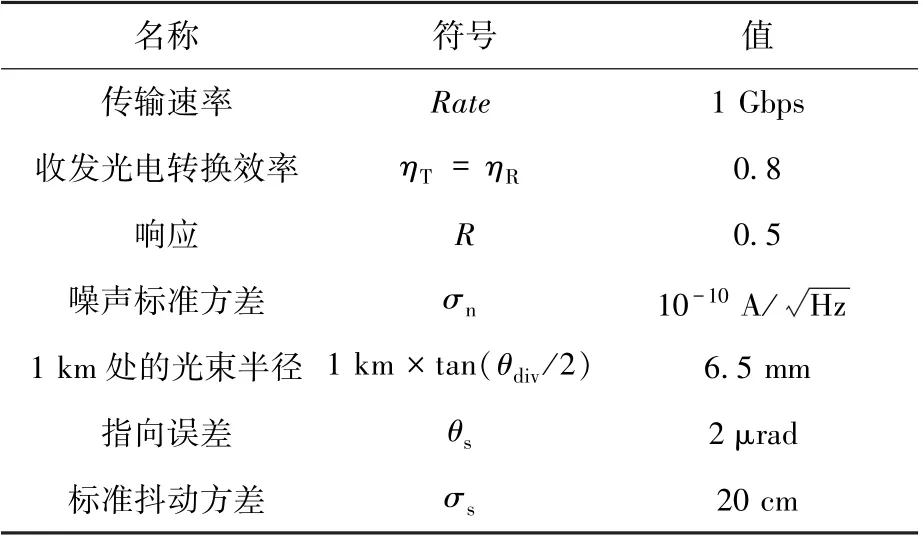
表2 仿真用参数[20]Table 2 Parameters for simulation[20]
4.2 中断概率仿真及结果分析
本节利用中断概率模型式(5)分析通信系统参数对MRR FSO 通信系统平均中断概率性能的影响。 仿真选用的参数见表1、2 所示。 图4 和图5 分别给出=10 dB,15 dB,20 dB 时,通信距离和束散角抖动与中断概率的关系曲线。 从图4中可看出,在range≤200 km 时,≥15 dB时,能够确保中断概率≤10-6。 通信距离越远,中断概率越高。
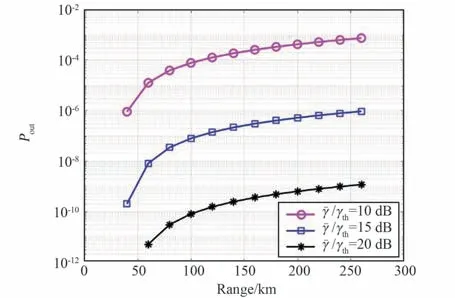
图4 中断概率随距离的变化Fig.4 Variation of outage probability with range
图5 中,通信距离range=200 km,在=10 dB 时,束散角抖动小于1.6 μrad 可确保中断概率≤10-6。 在=15 dB 时,束散角抖动小于2 μrad 可确保中断概率≤10-6;在=20 dB时,束散角抖动小于2.4 μrad 可确保中断概率≤10-6。 束散角抖动越大,中断概率越高。
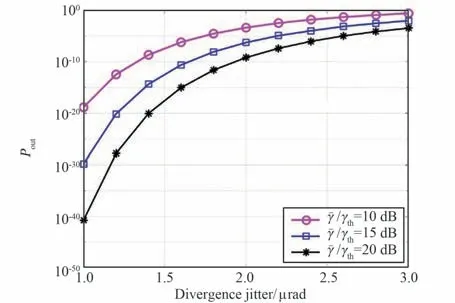
图5 中断概率随束散角抖动的变化Fig.5 Variation of outage probability with divergence jitter
图6 与图7 分别为中断概率随束散角及接收功率的变化情况。 从图6 可以看出,主动端激光束散角及越大,中断概率越小。=10 dB 时,束散角≥16 μrad,中断概率可保持≤10-6。=15 dB 时,束散角≥13 μrad,中断概率可保持≤10-6。 对于=20 dB 时,束散角≥12 μrad,中断概率可保持≤10-6。 从图7可以看出,在距离保持200 km,束散角抖动2 μrad时,中断概率随接收功率增大而减小,随γth增大而增大。
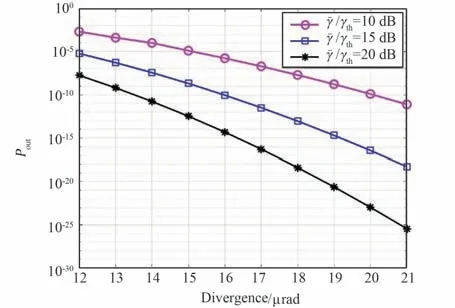
图6 中断概率随束散角的变化Fig.6 Variation of outage probability with divergence
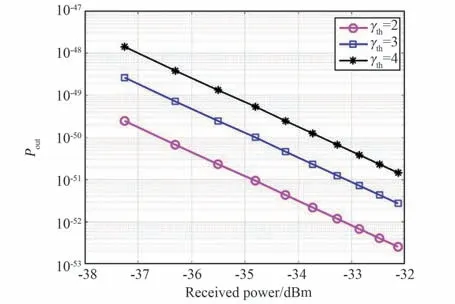
图7 中断概率随接收功率的变化Fig.7 Variation of outage probability with received power
4.3 平均误码率仿真及结果分析
图8 给出保持束散角、抖动、波长等参数不变的情况下,平均误码率在不同接收功率下,随距离的变化情况。 可以看出,平均误码率随通信距离变长而增加,随接收功率增大而减小,接收功率在-35 dBm 以上,所设计的通信参数均能使得误码率保持≤10-6。
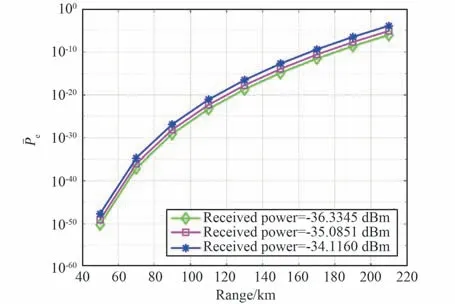
图8 平均误码率随距离的变化Fig.8 Variation of bit error rate with range
图9 给出了平均误码率随束散角抖动的变化情况。 在不同通信距离时,平均误码率均随着束散角抖动增加而增加。 在range=200 km 时,为确保平均误码率保持≤10-6,束散角抖动应小于2.3 μrad。 在range=150 km,为确保平均误码率保持≤10-6,束散角应小于2.8 μrad。 在range= 100 km 时,束散角小于3.1 μrad,平均误码率均可保持≤10-6。 束散角越大,通信中断概率越小,但其增大会导致误码率的增加及天线增益的减小,因此设计时应合理选择束散角。
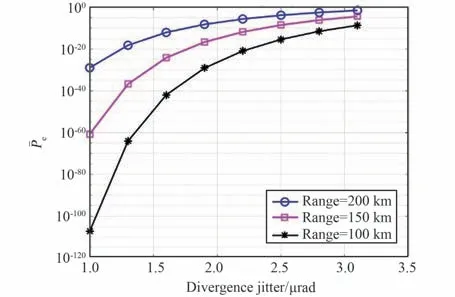
图9 平均误码率随束散角抖动的变化Fig.9 Variation of bit error rate with divergence jitter
5 结论
本文所设计的系统在1 Gbps 速率、200 km 通信距离条件下,通信中断概率及平均误码率均≤10-6。 研究结果可为基于调制反射器的星间激光通信系统设计提供借鉴。 本文仅讨论了MRR 技术在空间点对点激光通信应用的可行性,未来针对多星集群和组网的高吞吐量需求,可将网络编码等新技术与MRR 系统进行深度融合。