光伏系统中蓄电池充放电技术的建模仿真
2021-12-30周子焱王娟娟
周子焱,王娟娟
(大连交通大学 自动化与电气工程学院,大连 116021)
伴随传统能源的短缺,新能源成为一种新的趋势,其中光伏发电逐渐成为了一种合理利用太阳能的重要方式[1-2]。但由于太阳能的随机间断性,光伏系统要实现能量供需平衡[3],需要采用必要的储能设备[4-5]。蓄电池作为一种具有较高效率的能源转换装置,常常被用来做光伏系统储能设备[6]。从蓄电池的角度看,温度、过充电、过放电、长期处于低荷电状态SOC 等,都对其使用寿命以及能源利用率有影响[7-8]。因此为减少不必要的损伤,需要采取合适的充放电方式。
文献[9]为充分利用光能,提出了一种通过电流调节,来对蓄电池充电过程进行管控的策略;文献[10]提出了将MPPT 与阶段式充电相结合,通过改进MPPT 算法来管控蓄电池充电过程的策略,在充分利用太阳能的同时考虑对蓄电池的保护。虽然文献[9-10]都考虑了光伏电池最大功率的问题,但都未通过光伏电池MPPT 结合蓄电池控制的方式,来对系统稳定性进行测试。
针对上述存在的问题,本文在基于MPPT 的蓄电池模型的基础上,通过滑模控制最大功率追踪配合双闭环控制,在简单结构模型下,保证整个系统的功率稳定;通过实时检测蓄电池系统电压情况,保护蓄电池的使用寿命,避免过充和过放情况的发生。
1 光伏系统结构
光伏电池组件、蓄电池、功率变换器、控制器是独立光伏系统的主要组成部分,如图1所示。
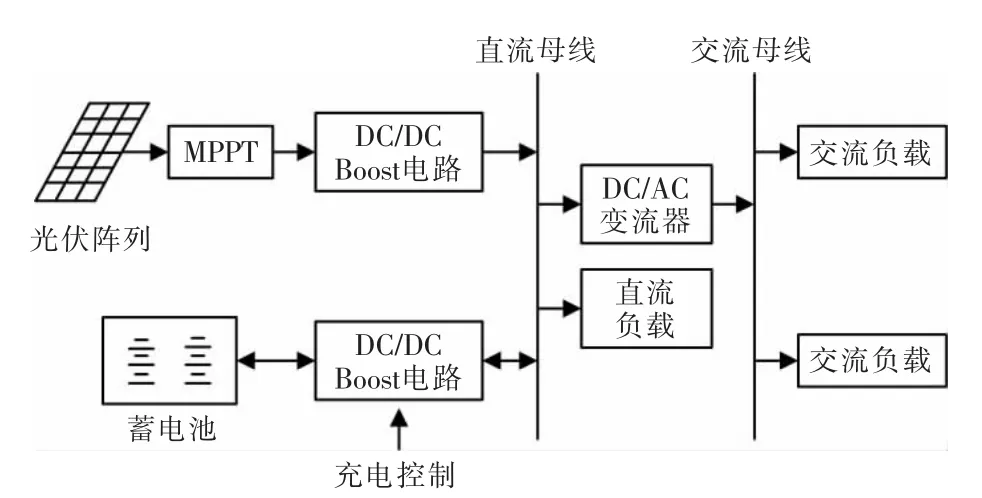
图1 分布式光伏系统组成Fig.1 Distributed photovoltaic system composition
光伏发电系统通过公共连接点并联储能系统的升压斩波电路,共同作用于逆变侧直流端,从而实现直流端输出电压的稳定。
基于储能的光伏发电系统主要工作原理为:光伏列阵可以通过进行最大功率跟踪算法来实现最大功率输出,通过DC/DC 升压斩波以及DC/AC 逆变来实现光伏发电系统的功率输出;储能系统经过DC/DC 双向斩波电路与DC/AC 逆变器公共连接点与光伏发电系统并联。有效控制蓄电池进行充电放电,与光伏阵列协调工作,使得系统负载可以稳定运行。
2 光伏发电系统
2.1 光伏电池数学模型
光伏电池将太阳能转为电能,是通过用P-N 结的伏特效应来实现的。
关于输出电流I 与输出电压V 之间的数学关系式[11]为

式中:Iph为光生电流;I0为饱和电流;n 为理想因子;k 为波尔兹曼常数,取值为1.38×10-23J/K;q 为电子电荷量,取值为1.6×10-19C;θ 为电池温度。
当光伏电池短路时,短路电流Isc=Iph。而当其处于开路时,令b=q/(nkθ),式(1)变为

式中:Voc为开路电压。
在最大功率点时,I=Im,V=Vm,由式(1)得:

式中:Im为最大功率电流;V=Vm为最大功率电压。
因此在参数Isc,Im,Voc,Vm和b 都在标准情况下(S=1000 W/m2,θ=25 ℃)均为常数时,数学模型为

2.2 滑块模型控制器设计
光伏电池的输出功率为

式中:Ppv为实际输出功率;Upv为实际输出电压;Ipv为实际输出电流。
根据光伏电池的输出特性可知,在最大功率点时:

将式(5)代入式(6)中得:

因此,令:

由于滑模控制对系统的干扰参数变化具有完全的适应性,所以当系统进入滑模状态运动时,考虑不变性条件:

选取状态量:
代入:

得:

结合上述公式,可得滑模控制器控制率为

式中:ueq为滑模的动态部分;un为基于可达性条件的非线性部分;D 为Boost 变换电路的稳态占空比;sgn(S)为符号函数,确保当kssgn(S)<0,能够保证系统符合可达性条件[12]。
综上所述,控制率为

3 蓄电池系统
本文通过双向半桥DC/DC 变换器来控制蓄电池的充放电。具有传递能量作用的双向DC/DC 变流器可以实现电能的双向流动。通过电子开关的切换工作,可以对电流流动方向进行有效控制,而且,通过连接逆变器和DC/DC 变流器,储能设备可以大幅降低电压,充放电动作的灵活性更高,装置容量的利用率更高,系统的运行成本减少,储能装置具有较高的经济性。双向DC/DC 变换器的电路如图2所示。蓄电池与双向半桥DC/DC 变换器的连接仿真模型如图3所示。
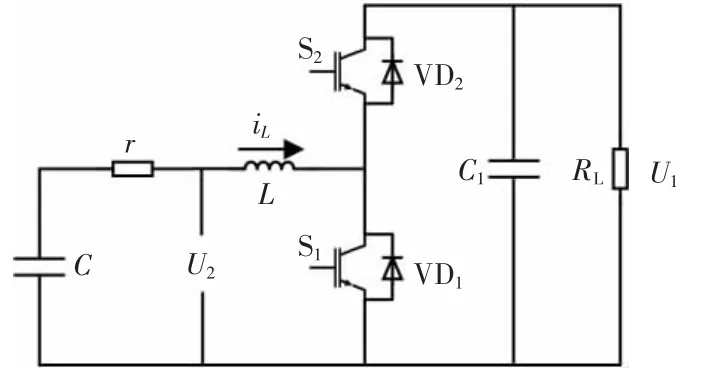
图2 双向变换器的电路Fig.2 Circuit diagram of two-way converter

图3 蓄电池与双向半桥DC/DC 变换器链接仿真模型Fig.3 Simulation model of battery and bidirectional half-bridge DC/DC converter link
4 充放电控制的建模仿真
通过仿真来模拟蓄电池的充放电过程,蓄电池进行放电处理时,其输出电流流向负载;而当其进行充电处理时,其电流从负载流向蓄电池。也就是说,负载要具备负载特性用来消耗蓄电池的电能,同时还具备电源特性用来给蓄电池充电。为了实现这个功能,本文采用受控电压源和电阻进行串联,且使用受控电流源的输入值的正负代表充电和放电电源,充放电控制如图4所示。

图4 充放电控制框图Fig.4 Control block diagram of charge and discharge
根据充放电的控制图,该控制策略采用电压环和电流环控制的双闭环控制,且电流环和电压环均采用PI 调节器。对于电压环控制而言,其主要作用就是让实际电压实时跟踪参考电压,即使受到外界扰动;电流环的作用就是让实际电流实时跟踪参考电流值,提高系统的动态响应速度。双闭环控制的仿真模型如图5所示,并考虑了系统过充和过放的能力,当蓄电池的SOC 值大于0.95 或者小于0.2 时,此时变换器会停止工作,控制算法会阻断PWM 脉冲。综合起来系统的整个仿真模型如图6所示。

图5 双闭环控制的仿真模型Fig.5 Simulation model of double closed loop control

图6 整体系统仿真模型Fig.6 Overall system simulation model
5 仿真结果分析
根据前文介绍的整个系统的建模过程,为了验证所提控制策略的可行性和有效性,仿真中PI 调节器的参数分别设置为:电压环PI 调节器的参数为Kp=0.3,Ki=15;电流环PI 调节器的参数为Kp=1,Ki=30。通过使用受控电压来进行模拟设置,来模拟蓄电池的充电放电控制过程。t=0.4 s 到t=1.2 s 时负载特性为消耗蓄电池电能,t=1.2 s 转换为给蓄电池进行充电。
直流母线电压的变化曲线如图7所示。可以看到,即使负载发生变化,也能够快速恢复到实际值,直流母线基本上保持400 V 不变。
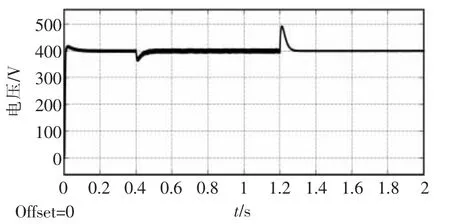
图7 直流母线电压变化曲线Fig.7 Change curve of DC bus voltage
蓄电池电流的变化曲线如图8所示,当电流大于0 时表示蓄电池放电;而当蓄电池小于0 时表示给蓄电池充电。可以看到,采用双闭环控制时,系统能够根据外界的变化迅速做出反应。

图8 蓄电池电流变化曲线Fig.8 Change curve of battery current
蓄电池两端的端电压的变化曲线如图9所示。当蓄电池端电压减小时,此时蓄电池表示进行放电过程;相反,当端电压逐步增加时,此时蓄电池进行充电过程。仿真结果符合理论分析,证明了仿真结果的正确性。

图9 蓄电池端电压变化曲线Fig.9 Change curve of battery terminal voltage
6 结语
本文针对光伏发电系统的特点,基于滑模控制的最大功率跟踪点,配合双闭环控制的策略,在Matlab/Simulink 软件中进行仿真模型试验。根据理论分析以及仿真结果可以看出,系统充放电模型策略合理,采用双闭环控制时,即使负载发生变化,系统能够根据外界的变化迅速做出反应,减少了蓄电池损坏的可能性,保证了直流母线电压的稳定,有利于整个系统安全稳定的运行。
