棱镜遮蔽视准线改造法在大坝水平位移监测中的应用
2021-12-30国网湖南水电分公司
国网湖南水电分公司 曾 远 梅 浩
视准线测量是大坝水平位移监测项目之一,传统视准线测量采用经纬仪和活动觇标配合测量,直接读出测点与固定视准线的距离来监测大坝水平位移。但视准线测量受地形限制,在大坝上游山体无法建立两个通视条件良好且地基稳固的仪器工作基点,造成了左右岸视距不等,精度不一致,且人员定向误差及人员配合操作带来的观测误差较大。综合而言,传统视准线测量法存在一定的局限性。
随着视准线仪器的T3经纬仪的停产及老化,寻找更加高效快捷的视准线监测方法变得迫切。智能型全站仪的广泛普及和应用,采用小角度或极坐标法可同时测角和测距,通过计算夹角和平距换算变化量,通过计算两次变化量就可确定测点周期内的偏移量[1]。但采用全站仪替换T3经纬仪和用棱镜替换活动觇标时,对于传统老坝工作基点选取受限制,只能在原有工作基点进行改造,全站仪测量时相邻测点间夹角较小,视场内存在多个棱镜、相互干扰,易导致全站仪难照准、测量数据不准确等问题。为解决视准线测点间夹角较小、影响观测,促进视准线改造,提出棱镜遮蔽视准线改造法进行大坝水平位移监测。
1 棱镜遮蔽视准线改造法
棱镜遮蔽视准线改造采用一款智能棱镜罩配合全站仪进行小角度或极坐标测量,实现棱镜罩自动门远程启闭,打开棱镜罩进行测量通视,测量完毕关闭自动门,有效错开相互影响的视准线测点,增大测点间的夹角。
智能棱镜罩的原理。智能棱镜罩主要包括棱镜罩外壳、自动启闭装置、自动气象测量元器件。棱镜罩的尺寸设计要匹配现有观测墩的尺寸,做到尺寸合适、经济适用;棱镜罩启闭装置采用wifi 版机械手臂,其行程为90°的旋转角,在测站位置可通过移动设备控制旋转机械手臂打开棱镜罩小门,实现测量时能开启自动门进行测量通视,测量完毕可关闭自动门。且智能棱镜罩内加装环境量传感器,实现自动测量测站气象值,为进行后续内业处理提供气象修正。
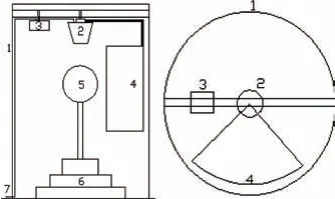
图1 智能棱镜罩内部构造示意图
视准线小角度观测方法。在视准线的工作基点A 架设仪器,另一端的工作基点B 和测点i 上架觇牌或棱镜,依次对准工作基点B 和测点i,测量夹角BAi 的角度β 和Ai 之间的距离S。根据《DL/T 5209-2020混凝土坝安全监测资料整编规程》[2],视准线测点的测值L 计算为L=β×ρ/S,式中β为小角度观测值,ρ为206265,S 为工作基点到测点间的水平距离、mm。某周期测点位移为首次偏离值与该周期偏离值的差,其符号在规范规定为:向下游位移为正,所以偏移值根据水流方向和测点位置略有调整。
视准线极坐标观测方法。在视准线的工作基点A 架设仪器,另一端的工作基点B 和测点i 上架设棱镜,依次对准工作基点B 和测点i,测量夹角BAi 的角度β 和Ai 之间的距离S。根据《DL/T 5209-2020 混凝土坝安全监测资料整编规程》[2],极坐标法测量已知有工作基点A、B 的坐标,测点i的坐标计算方法如下:
Xi=XA+DAicos∂Ai、Yi=YA+DAisin∂Ai,式中Xi为测点i 的X 方向坐标,m;Yi为测点i 的Y 方向坐标,m;XA为测点i 的X 方向坐标,m;YA为测点i 的Y 方向坐标,m;αAi为方向Ai 的坐标方位角,°;DAi为边长Ai 的水平距离,m。
2 棱镜遮蔽视准线改造法的运用案例
2.1 工程概况
柘溪大坝现有坝顶水平位移采用传统视准线法进行监测,其工作基点分别位于两岸稳定的岩石上,两工作基点之间的距离为473.3m。测点布设在坝顶下游栏杆外专用的牛腿上,共16个测点。在视准线改造中受地形和坝形的限制,在大坝下游侧难以找到合适的工作基点,只能在原有的工作基点进行视准线改造。且因大坝电梯井挡住视线,所有测点并不能完全通视,只能分段测量。
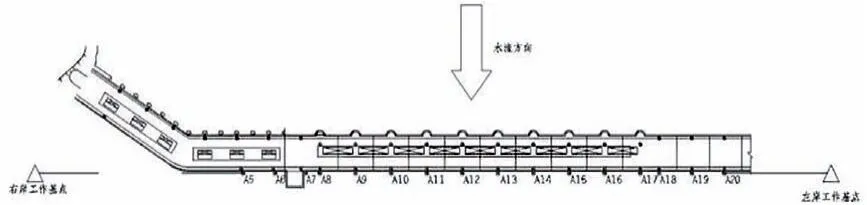
图2 柘溪大坝视准线测点
坝顶16个测点在坝顶呈直线布设,在工作基点架设全站仪测量时,部分测点间夹角较小,视场内出现多个棱镜,如在左岸工作基点架设仪器,A7和A8同时出现、A17与A18同时出现;在右岸工作基点架设仪器,A19和A20同时出现,后经测量其中A7与A8间距为4.40米、水平夹角为0.6”,A19与A20的间距为14.12米、水平夹角为0.4”。
2.2 测量对策
在坝顶每个视准线观测墩安装固定棱镜,并配套安装智能棱镜罩保护棱镜。因电梯井挡住视线、故分段监测,右岸基点监测A5~A6、A11~A13、A19~A20共7个测点;左岸基点监测A7~A10、A14~A18共9个测点。测量分别采用小角度和极坐标法进行坝顶水平位移监测,对每个测点进行四测回测边测角观测,测点间夹角影响分批次开启棱镜罩进行测量,如右岸工作基点设站时,先将A7、A9、A14、A16、A18的棱镜罩门打开进行测量,待测量完毕,再将A7、A9、A14、A16、A18的棱镜罩关闭,打开A8、A10、A15、A17的棱镜罩门打开进行测量。同样的工作原理在左岸工作基点设站测量,保证全站仪观测时视场内只有一个棱镜,避免棱镜间的相互干扰。
2.3 极坐标测量结果分析
对测量结果进行极坐标平差处理,将左、右岸工作基点的X 坐标设置为0,经过平差所得各点X方向坐标即为该点在上下游方向水平位移,Mx 为测点X 方向坐标的中误差,A5~A20的极坐标法测量X 方向坐标的中误差均符合《DL/T 5178-2016 混凝土坝安全监测技术规范》中混凝土重力坝水平位移监测精度±1mm 的要求[3]。其在各点的极坐标法平差结果为:X(mm)13.34、13.09、16.98、15.83、18、10.36、13.81、20.02、13.7、13.18、2.77、-0.21、5.63、11.5、7.52、7.16;Mx(mm)0.69、0.77、0.6、0.57、0.49、0.86、0.73、0.22、0.30、0.98、1、0.91、0.83、0.79、0.76、0.84。
2.4 小角度测量结果分析
在左、右工作基点通过棱镜罩分两组对A5~A20各测点依次进行小角度测量,同样采用全站仪自动测量水平角并现场记录,按照小角度计算方法进行成果计算,结果如下:X(mm)13.27、13.01、16.49、15.37、17.67、10.04、13.89、20.20、13.94、12.85、2.52、-0.43、5.37、11.24、7.79、7.44。由于周期之间的没有进行水平距离的测量,S1和S2作为常数考虑,则中误差传播关系表示为[4]mΔi=s/ρmβ。
在柘溪大坝16个视准线测点中离工作基点水平距离最远的测点为A20至右岸工作基点348m,当采用测角精度为0.5”的全站仪时mΔi为0.84mm,小角度测量中16的测点最大中误差符合《DL/T 5178-2016混凝土坝安全监测技术规范》中混凝土重力坝水平位移监测精度±1mm 的要求[3]。
