基于不同光谱匹配算法的无人机高光谱遥感影像建筑垃圾分类研究*
2021-12-30徐隆鑫孙永华何仕俊赵元铭
徐隆鑫 ,孙永华 ,何仕俊 ,赵元铭 ,叶 淼
(1.首都师范大学资源环境与旅游学院,北京 100048;2.水资源安全北京试验室,北京 100048;3.教育部三维信息获取与应用重点试验室,北京 100048;4.核工业北京地质研究院遥感信息与图像分析技术国家级重点实验室,北京 100029)
0 引 言
我国正处于经济建设的高速发展时期,城市更新速度加快,不可避免地产生了大量的建筑垃圾,而我国当前对建筑垃圾的处理仍处于初级阶段,大量建筑垃圾被露天堆置或填埋,侵占了大量土地,同时也造成了资源的极大浪费[1-2].对建筑垃圾进行合理的分类,既可以提高建筑垃圾的综合回收利用率,又可以进一步改善生态环境质量.
近些年来,针对建筑垃圾的分类研究有所增加.郑龙海等[3]提出了一种基于机器视觉与称重技术相结合的建筑垃圾自动分类方法,实现了建筑垃圾中常见的木头和砖石的自动分类;Xiao等[4]基于木材、塑料和砖块等6种常见类型建筑垃圾的光谱反射率特征,利用极限学习机和随机森林算法完成了6种建筑垃圾的分类,并取得了较好的分类精度;Davis等[5]基于自动识别不同材料的技术,设计了一种深度卷积神经网络,成功识别了7种典型建筑垃圾,识别准确度高达94.0%.针对特定研究区,上述分类方法往往需要大量的数据样本,使得建筑垃圾分类工作的时效性受到限制.无人机遥感凭借其低成本、灵活机动性强、操作简单和起飞限制条件少等优势,已被广泛地应用于环境保护监测[6-7]、工程测量[8-9]、地表植被分类识别[10-12]、生物量估算及生物多样性监测[13-14]、农作物病虫害监测及产量估产[15-17]等多种领域.随着无人机遥感技术的逐渐成熟,建筑垃圾的分类研究也迎来了新的机遇.
当前遥感领域中,基于整波形特征的光谱匹配技术已经成为了高光谱成像光谱地物分类识别的关键技术手段,该技术是通过判定标准参考光谱和未知像元光谱之间的相似性,来达到识别地物类型的目的.从概念上来讲,光谱匹配技术模式主要是有查找、匹配和聚类3个过程[18-19],常用的光谱匹配模型有最小距离、光谱角度匹配、光谱间距离匹配、二值编码匹配、多值编码匹配和光谱信息散度等[20].段瑞鲁等[21]基于实测的沙丘植被光谱数据,对比最小距离、光谱角度匹配、光谱相关系数和光谱信息散度4种光谱匹配模型,成功实现了沙丘典型植被的分类;赵冬娥等[22]提取了多种常见生活垃圾的特征波段,在此基础上,利用光谱角匹配算法成功实现了生活垃圾的识别分类,分类准确度均达99.0%以上;明群杰[23]采用HJ-1A高光谱数据结合植被光谱库数据,分析了交叉相关光谱匹配、光谱角匹配和小波变换等多种匹配算法的适用性,对研究区内的小蒿草(Kobresia pygmaea)植被和针茅(Stipa)植被得到了较好的分类结果.
本研究利用无人机搭载高光谱成像仪获取研究区高光谱遥感图像,并进行几何校正和辐射校正等图像预处理,基于研究区内背景地物的光谱特征差异,利用决策树法将研究区内的背景地物分离,针对研究区内4种不同类型的建筑垃圾,选取样本点,提取光谱信息,建立波谱库,在此基础上分别利用二进制编码、光谱角填图和光谱信息散度3种光谱匹配算法对建筑垃圾进行分类,并对分类的结果进行验证与分析,以此为建筑垃圾分类识别提供技术支持.
1 研究区与数据
1.1 研究区概况
本文选取的研究区为中国辽宁省盘锦市大洼区荣兴水库西侧1.2 km处,研究区内地物类型较为丰富,主要包含水体、植被、裸土、柏油路以及多类型建筑垃圾.其中:水体主要为养殖池塘,池塘中包含常见的水生植物和微生物;植被类型主要有芦苇(Phragmites austrous)和蒿子(Artemisia carvifolia),芦苇所占比例达95.0%,集中分布在池塘两侧,蒿子作为一年生草本植被,但其茎的木质化程度较高,还属于灌木,主要分布在池塘边缘两侧,较为贴近地面;研究区内建筑垃圾主要包括防尘布、地基渣土、瓦砾砂石及白色塑料,主要是由周边建筑工地在施工过程中产生的,由于研究区位置较为偏僻,故建筑垃圾大多被随意露天堆放.
1.2 数据获取与处理
本研究采用的无人机高光谱系统中,无人机平台采用大疆经纬M600Pro无人机.高光谱图像获取设备为GaiaSky-mini2推扫式机载高光谱成像系统,系统内置扫描系统和增稳系统,可以同时实现自动曝光和自动匹配扫描的速度,具体技术参数见表1.
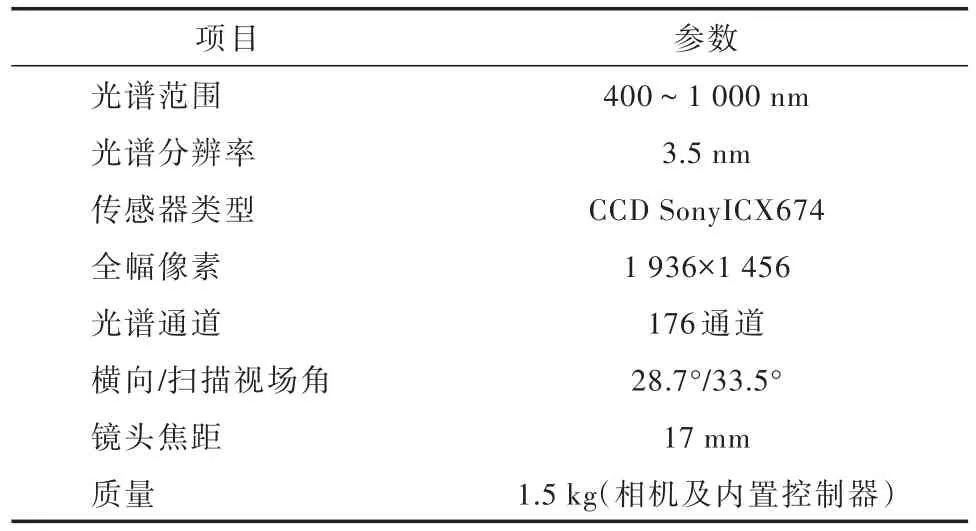
表1 高光谱相机技术参数
数据采集试验于2019年9月27日14:00进行,试验时天气晴朗、无风,无人机航高设定为200 m,航速设定为12.8 m/s.采集数据时设定相机采用推扫模式进行作业,获取的无人机高光谱图像的空间分辨率为79 mm.
野外数据采集时,根据像控点布设原则,选择道路中间路沿石、池塘拐角以及人工布设的标志物,共5个像控点,其中人工布设的标志物处用红色喷漆喷成十字交叉型,像控点坐标使用千寻星矩SR1智能网络RTK接收机测量,利用像控点数据对无人机高光谱图像的几何畸变进行数学模拟完成几何校正.由于无人机飞行过程中,航线两端机身自身抖动,云台未能及时补偿运动误差会造成图像两端的扭曲变形[24],因此对无人机高光谱图像进行裁剪,剔除边缘无效图像.
利用SpecView软件平台针对高光谱图像进行辐射校正,用来消除数据获取和传输过程中产生的系统、随机辐射失真或者畸变,计算公式为

式中Rr为辐射校正过的图像反射率值,Dr为无人机原始图像的像元亮度值,Dw为参考板(白板)的像元亮度值,Nd为成像光谱仪内部系统噪声.
由于高光谱成像仪是在无人机飞到一定高度后获取图像数据,图像本身会受到大气和水汽等因素的影响,为了消除影响,在无人机起飞之前,在拍摄区域放置一块经过国家计量院标定过的反射率为20%、面积为1 m×1 m的灰布,在高光谱成像仪获取图像时,只需要保证其中一景影像中覆盖到灰布即可.大气校正的公式为
式中Rf是消除大气、水汽等因素后的图像光谱反射率,Rr是经过黑白校正后的图像反射率,Rs是经过国家计量院标定的灰布的光谱反射率,Rg是经过黑白校正后图像中的灰布反射率.
2 研究方法
2.1 背景地物分离
本次试验将研究区分为背景地物和建筑垃圾2类,其中背景地物包含植被、水体、阴影、柏油路和裸土,建筑垃圾包含白色塑料、防尘布、地基渣土和瓦砾砂石,具体信息见表2.
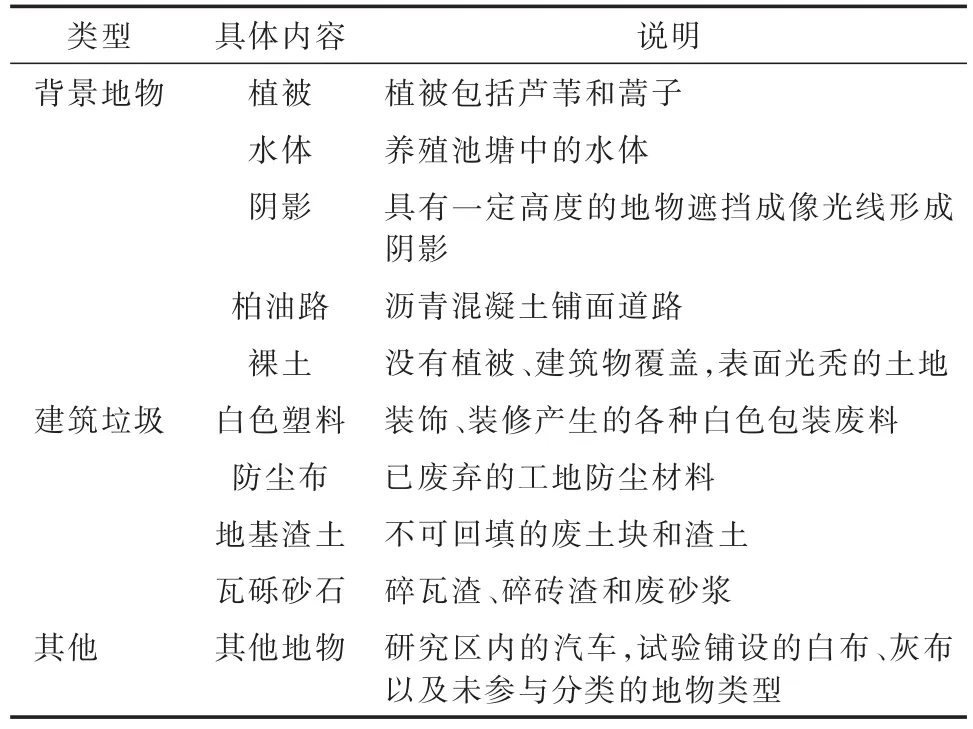
表2 研究区内地物类型
为了消除背景地物对后续建筑垃圾分类识别产生的影响,本次试验首先利用决策树分类法将背景地物分离.针对不同类型背景地物分别选取30个样本点,统计并提取样本点光谱信息,制作各类背景地物的光谱曲线,如图1所示.基于各类背景地物的光谱曲线,分析各地物之间的光谱特征差异,选择特征波段.背景地物分离过程为:通过选取近红外波段 b117(780.8 nm)和红光波段 b88(679.3 nm)来构造归一化植被指数(normalized vegetation index,NDVI),当 NDVI≥0.2 时,首先将植被分离出去;由于水体和阴影的光谱反射率在b163(947 nm)处的光谱反射率值明显低于其他类型地物,因此利用单波段阈值法将水体和阴影从图像中分离出来;通过选取 b120(791.4 nm)和 b58(577.2 nm)来构造归一化水体指数(normalized difference water index,NDWI),当 NDWI>0.5 时,分离水体;由于裸土和柏油路的光谱曲线从b86(672 nm)处开始快速下降,并且在 b46(537 nm)~b79(648 nm)之间同时存在反射峰和反射谷,这是其他类型背景地物不具备的光谱特征,首先利用单波段阈值法和波段比值法将二者分离出来;又因为裸土和柏油路在b45(534 nm)~b58(577 nm)之间的光谱曲线斜率存在差异,因此通过波段比值法进行细分.
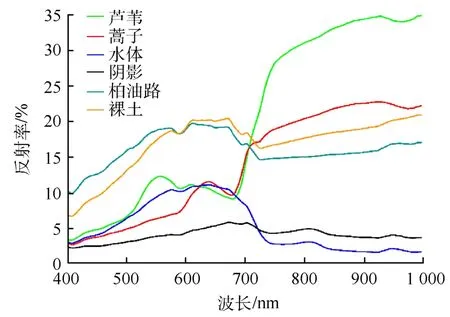
图1 各类背景地物光谱曲线
由于本次分类试验是利用决策树将背景地物进行了分离,而决策树算法在执行每一个判断条件时,都会对当前图像信息进行遍历,因此这里还要考虑部分背景地物验证点被错分为建筑垃圾的情况,并对错分情况进行评估.通过统计:针对阴影选取的20个验证样本点中,有1个点被错分为地基渣土;针对裸土选取的20个验证样本点中,有1个点被错分为瓦砾砂石.由于针对6种背景地物选取的120个验证点中,仅有2个点被错分为建筑垃圾,错分率为1.7%,因此可以表明,利用决策树分离背景地物时,不会对后续建筑垃圾的识别造成影响.
2.2 光谱匹配算法
本试验利用二值编码、光谱信息散度和光谱角匹配3种匹配算法对研究区内的建筑垃圾分类识别.
(1)二值编码匹配算法是以编码的方式将图像中每个像元的光谱信息特征进行表述,极大地提高了光谱匹配计算的效率[25].具体的编码公式为

式中x(n)为像元第n波段的光谱值;h(n)为像元第n波段的编码值;N为总波段数;T为选定的门限值,一般选为光谱的平均光谱值.
无人机高光谱图像经过二值编码处理之后,图像中每个像元光谱变为一个与波段数长度相同的编码序列,每个序列中的值由0或者1组成.虽然二进制编码算法在一定程度上有助于提高图像光谱数据的分析处理效率,但有时不能提供合理的光谱可分性,并且会失去很多细节光谱信息[26].
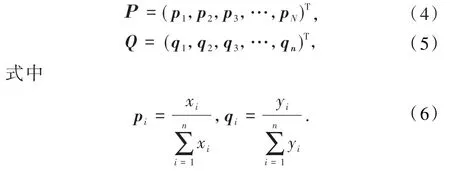
(2)光谱信息散度算法基于信息论的理论,利用散度度量像元波谱与波谱库中端元波谱的匹配程度,散度越小,匹配程度越高.在信息论中,Kullback-Leibler(K-L)散度是对信号相似度的一般度量,将其应用于高光谱遥感图像中,不仅可以得到不同波段图像之间的信息量差异,而且可以描述标准参考光谱和待匹配像元光谱曲线的相似性[27-28].假设在波段数为n的高光谱数据中,存在2 条光谱曲线分别为X=(X1,X2,X3,…,Xn)T和Y=(Y1,Y2,Y3,…,Yn)T,则可得 2条光谱曲线的概率向量分别为:
根据K-L信息函数,定义Y关于X的相对熵和X相对于Y的相对熵为:
综上,X和Y光谱曲线的光谱信息散度为

实际应用中,光谱信息散度是以图像中选取的各类地物参考样本的平均光谱作为参照,计算图像上每个像素与各类别地物参照光谱的光谱信息散度,然后将该像素归为光谱信息散度得分最高的类别中.
(3)光谱角匹配算法是将具有n个波段的高光谱数据中每个像元的光谱曲线作为N维空间矢量,计算其与已知标准参考光谱之间的广义夹角,进而判断匹配的好坏程度[29],属于监督分类方法的一种.假设矢量分别为X=[x1,x2,x3,…,xn]和Y=[y1,y2,y3,…,yn],则其之间的广义夹角(θ)可表示为
式中n为高光谱图像波段数.θ值越小,X和Y的相似性越大,即夹角越小,说明越相似.在实际的分类应用中,根据真实地物图像,选取各类地物的参考样本,并计算平均光谱作为样本中心,利用式(10)分别求出图像中每一个像素与不同类别样本中心的夹角,得到相似度排名,然后将该像素归入与其夹角最小的类别中.
3 结果与分析
3.1 建筑垃圾分类识别
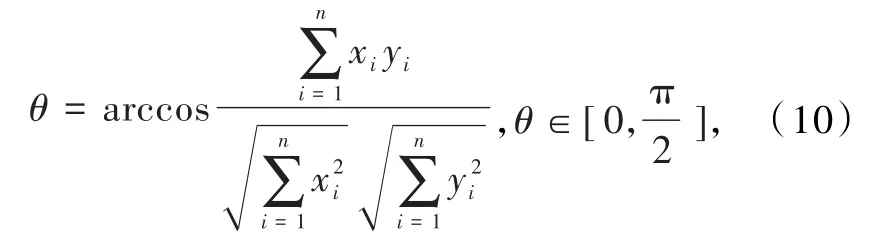
针对研究区内不同类型的建筑垃圾分别选取30个样本点,统计并提取样本点全部波段光谱信息,并通过图像文件格式保存为二进制的数据文件(.sli),制作4类建筑垃圾的光谱曲线,建立波谱库(图2),便于存储和管理光谱信息.
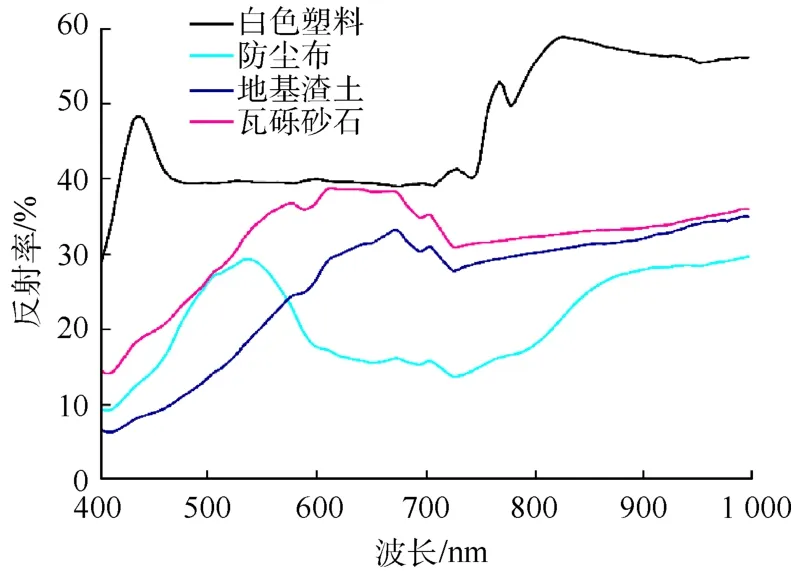
图2 各类建筑垃圾光谱曲线
将背景地物分离之后的研究区图像转换为感兴趣区文件,并利用感兴趣区文件对研究区图像进行裁剪,从而提取出研究区内的建筑垃圾.针对提取出的建筑垃圾区域,基于建立的建筑垃圾波谱库,利用二值编码、光谱信息散度和光谱角匹配3种光谱匹配算法,对建筑垃圾进行分类识别,分类结果如图3所示,不同类型建筑垃圾的分类结果以不同的颜色区别显示.对比3种不同光谱匹配算法的分类结果:二值编码匹配算法的分类结果较为粗糙,主要表现为瓦砾砂石、白色塑料之间相互错分,白色塑料漏分,以及细小图斑较多导致的分类区域斑块较为破碎等现象;光谱信息散度和光谱角匹配2种算法分类效果相近,相对于二值编码,很大程度上减少了错分、漏分现象,并且分类区域斑块较为完整,针对4种建筑垃圾的分类识别更加准确精细.
图3 建筑垃圾分类结果
3.2 分类结果精度评价
针对高空间分辨率的无人机高光谱图像,基于图像像元对4种建筑垃圾,分别选取15个验证样本点,共选取60个验证点.此次验证点取样规则为:验证点之间要保持一定间隔,且均匀分布.通过建立混淆矩阵得到的总体分类精度和Kappa系数(κ),对3种光谱匹配算法的分类结果进行精度评价.总体分类精度表示的是被正确分类的验证点数与全部验证点数之间的比值.κ是一个用于一致性检验的客观指标,通过一种离散的多源技术与总体分类精度形成互补,当κ为0.61~0.80时,表示二者之间具有高度一致性.光谱匹配不同建筑垃圾3种算法精度评价结果列于表3.试验研究所用的3种光谱匹配算法中,二值编码匹配算法的总体分类精度和κ值最低(κ=0.70),结合分类结果中出现的错分漏分以及区域斑块破碎等现象,体现了该算法容易丢失细节光谱信息、分类结果粗糙的劣势;光谱角匹配算法的总体分类精度和κ值最高(κ=0.85),分类效果优于其他2种算法,针对4种建筑垃圾的分类识别,制图精度均>80.0%,防尘布、地基渣土和白色塑料3种建筑垃圾的用户精度均>85.0%,而瓦砾砂石的用户精度仅为77.8%,是由于选取的15个地基渣土验证样本点当中,有3个点被错分为瓦砾砂石所导致,结合野外实际情况,分析是由于部分地基渣土表面散落的细碎瓦块,导致分类器将地基渣土的局部区域错分为瓦砾砂石.对于选取的15个白色塑料验证点,有2个被错分为其他,可能是由于地面铺设的定标白布与白色塑料的光谱反射特性较为接近导致的.
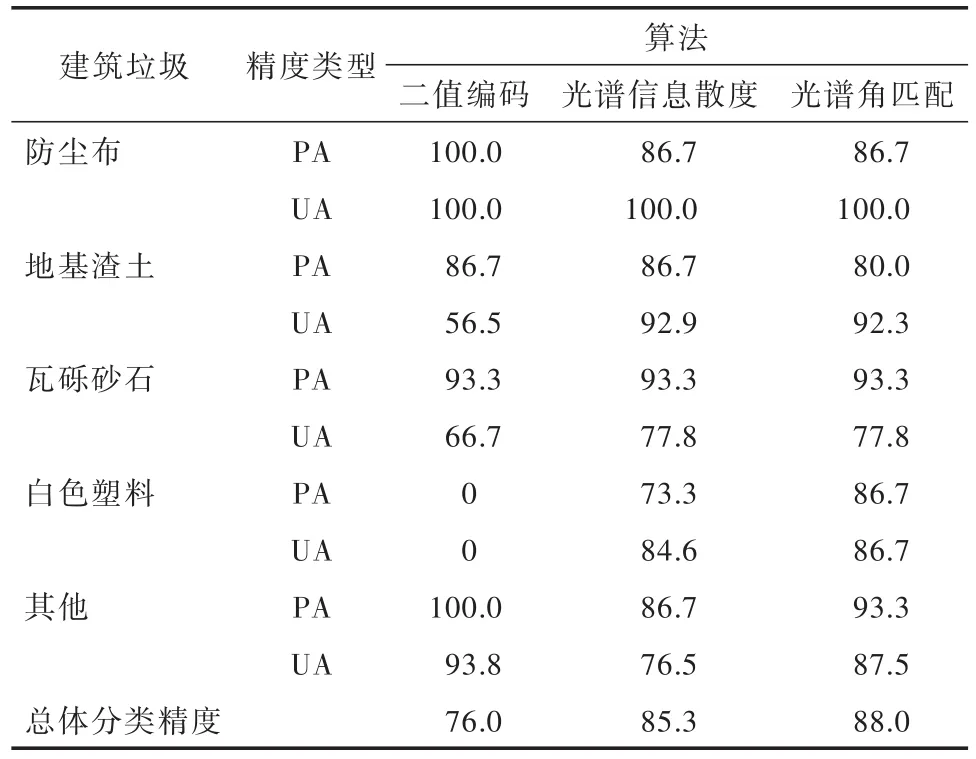
表3 3种光谱匹配算法的精度评价结果 单位:%
4 结 论
本研究创新性地将无人机高光谱遥感应用于建筑垃圾的分类识别,以获取研究区无人机高光谱图像为基础,利用决策树法对研究区内的背景地物进行了分离,在此基础上,提取了4类建筑垃圾的光谱信息,并建立了标准波谱库;利用二值编码、光谱信息散度和光谱角匹配3种光谱匹配算法,实现了建筑垃圾的精细分类,并对分类结果进行精度评价.
通过比较分析3种光谱匹配算法的分类结果,得出以下结论:(1)二值编码由于其编码特性,导致分类过程中某些细节光谱信息丢失,分类结果中错分、漏分现象较多,分类区域斑块破碎,整体分类效果不理想;光谱信息散度算法的总体分类精度为85.3%,κ=0.82,总体分类效果较好;光谱角匹配算法的总体分类精度为88.0%,κ=0.85,整体分类效果最好.(2)对建筑垃圾的分类识别过程中,光谱信息散度和光谱角匹配2种算法的总体分类精度都>85.0%,κ值均>0.80,验证了利用光谱匹配算法对建筑垃圾进行分类识别的可行性和科学性.
本文所采用的分类方法属于监督分类,对样本的依赖性较大,训练样本和验证样本的选取不同以及光谱匹配算法中阈值的设定,可能会使得最终的分类效果存在差异.因此,在后续研究中,将会结合相关分类方法进一步研究建筑垃圾的分类识别,提高其精度,同时为了减少光谱匹配分类过程中由于光谱信息差异带来的误差,在无人机高光谱数据采集时,留意太阳入射角及仪器观测角度等众多因素,避免同物异谱、异物同谱等现象发生.
