放射源远程监控系统设计与实现
2021-12-30吕胜强王耀琦王小鹏
吕胜强,王耀琦,王小鹏
(兰州交通大学 电子与信息工程学院,兰州 730070)
随着对放射材料的深入研究,放射源被广泛应用于工业、农业和医学等各种领域,若保管使用不当,发生剂量泄露或放射源丢失事件,则会带来灾难,发生危险[1].为了保证放射源的安全存储与运输,有必要利用通信技术和嵌入式等技术对处于不同领域和环境的放射源进行监控[2-3].文献[4]开发了基于STM32的放射源远程监控与跟踪终端装置,结合GPRS、GPS、剂量监测和远程通信等技术实现对放射源的在线监控;但没有对采集的数据处理.文献[5]开发了基于GPS的室外放射源信息监控系统,结合了GSM/GPRS技术、数据库技术和剂量监测技术等,并对位置、剂量和温湿度等数据进行了算法处理;但没有涉及阈值报警.文献[6]设计了放射源两级定位系统,结合了STM32、GPS、GSM与WiFi等技术,具有远程数据上传、室内外定位以及异常报警等功能,一级定位中室外使用GPS定位,GPS信号弱的地方使用WiFi和GSM定位,二级定位时根据设备测得剂量转换为设备与放射源之间的距离;但方案受限于室内WiFi环境.文献[7]基于物联网技术利用Arduino和MQTT网络协议开发了监测设备和交互界面.文献[8]利用微控制器和GSM技术实现短信报警.
在分析了国内外研究现状以后,本文设计一种放射源实时在线监控系统.系统采用光电倍增管对放射源剂量进行测量,设计剂量脉冲放大和滤波整形电路,并对分频采集后的剂量脉冲滑动平均处理和线性拟合;北斗定位(BeiDou navigation satellite system,简写为BDS)模块采集放射源位置信息,使用自适应Kalman滤波算法处理位置数据;C/S架构的上位机实时显示数据并判断是否超出阈值,实现对放射源泄露剂量和位置的实时监控.
1 系统总体设计
图1为放射源远程监控系统的总体架构,主要分为剂量与位置采集终端和上位机监测两部分.终端采集数据并处理,5G模块将采集到的数据包发送到信息中心.信息处理中心承担整个系统的数据汇总和子网设备的终端控制、数据分析、存储和展示等重要功能.接收到的数据通过解析处理,在数据库存储和前端显示.用户交互主要通过基于C/S架构的客户端,客户端功能主要包括放射源状态的实时监控、设备运行历史数据(剂量变化曲线、运输轨迹)、设备和用户的管理、系统配置(网络配置、报警阈值)等.
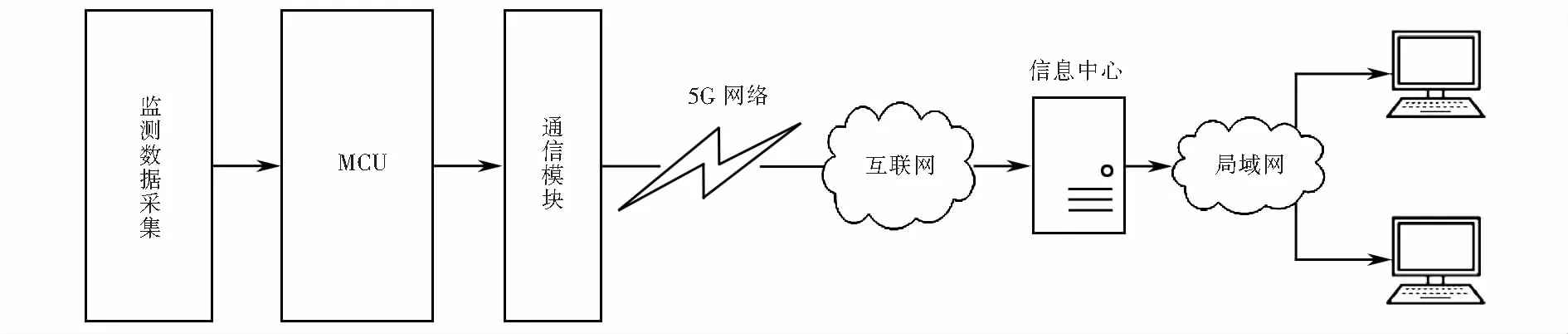
图1 放射源远程监控系统总体架构
1.1 系统硬件设计
系统硬件电路结构如图2所示.硬件电路主要包括MCU、剂量采集、位置采集模块、5G通信模块,以及MCU外围电路、电源等.

图2 系统硬件电路结构
1.1.1 剂量采集单元
放射源剂量采集部分选用光电倍增管[9],由闪烁体、光电倍增管和电子仪器组成的闪烁计数器可用于探测射线[10].在工作时,高压电源提供的1 000 V以上的高压通过分压电阻逐级分配给各个倍增级,放射源产生的放射性射线同闪烁体相互作用,使闪烁体的原子、分子电离或激发,被激发的原子和分子退激时发射光子,然后再利用反射物质和光导把光子收集到光电倍增管的光阴极上;光导可以减少闪光在闪烁体射出面发生反射,使大部分光线能够射出闪烁体,每一个射线射入闪烁体后,由于光电效应,光电子在光电倍增管中倍增,形成一个脉冲电流;计数器产生的脉冲经过放大、整形电路之后通过I/O口送入单片机处理.闪烁计数器组成如图3所示.

图3 闪烁计数器组成示意图
图4为剂量脉冲信号采集处理电路,包括信号的放大和甄别[11-12].由于闪烁计数器输出的电流信号幅值较小,使用两个THS3001CD电流反馈放大器对前端输出脉冲信号两级放大,达到后续脉冲甄别电路能够识别的程度.一级放大电路放大倍数与电阻R3和R4有关,二级放大电路与R11和R12有关.经放大电路后,背景噪声也被放大,使用MAX913CPA比较器对脉冲进行甄别.经过甄别后的脉冲信号频率过高,使用分频器对信号进行分频处理,经分频处理后的脉冲信号送入单片机I/O口,单片机对脉冲处理生成剂量率.

图4 放射源剂量采集处理电路
1.1.2 北斗定位模块
放射源的位置信息采集选用ATGM336H-5N BDS/GNSS定位模块[13],该模块定位精度高,有利于提高放射源位置精度.定位模块与单片机连接如图5所示,TXD输出导航数据,RXD接收配置命令.系统上电初始化后,模块默认以1 Hz的频率向单片机发送数据包,单片机接收到的数据包按NMEA0183协议解析并滤波处理.
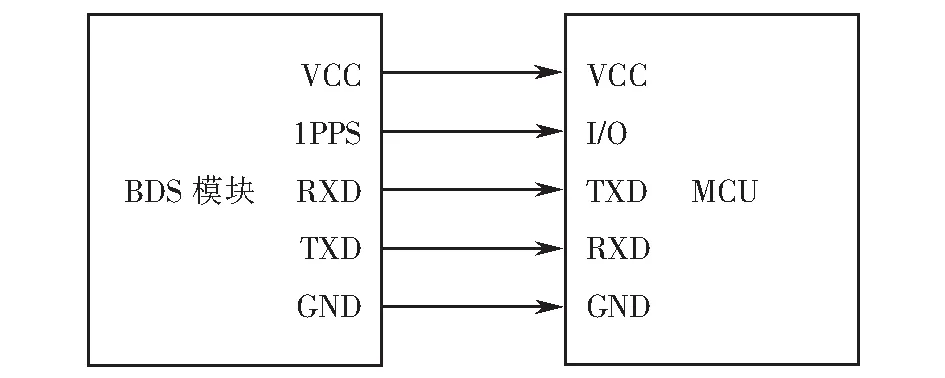
图5 定位模块和单片机连接原理
每个放射源都安装有监控终端,在存储状态下遭异常移动后,位置超过预警值,上位机异常报警并对放射源轨迹跟踪;在运输状态下,可以实时显示放射源位置和轨迹.
1.1.3 信号处理与中央控制模块
MCU选用STM32单片机,主要负责各模块控制与调度、剂量和位置数据滤波处理.由于剂量高速脉冲易受环境高频噪声影响,需要对脉冲滑动平均滤波处理,滤波后的脉冲数通过线性拟合可以得到脉冲数与放射性剂量的关系,生成剂量率.位置采集数据由于卫星定位粗差带来定位精度误差,利用自适应Kalman滤波分离出有用的信号.
1.1.4 通信模块
系统远程数据传输采用SIM8210C模块,经过采集模块采集和单片机处理后的剂量和位置等其他信息,可以通过该模块上传到信息中心.具有的5G通信能力能够进行数据的快速收发,保证上位机显示数据的实时性.
1.2 系统软件设计
系统软件设计主要包含终端设备入网和现场数据采集处理,以及数据包封装和发送.软件流程图如图6所示.系统首先进行初始化,包括数据采集模块和通信模块的初始化;然后通过5G通信模块进行SIM卡入网,入网成功之后进行位置和剂量的采集;采集的位置数据是包含时间等信息的数据包,协议解析得到经纬度信息,并进行自适应卡尔曼滤波处理;采集的脉冲剂量信号转换生成剂量率.经过处理之后的数据封装成数据包,交由通信模块发送给信息中心.

图6 系统软件流程图
2 现场数据处理
2.1 剂量数据处理
剂量信号为闪烁计数器输出的高速序列脉冲,高速脉冲容易受到环境高频噪声等的影响,通过对高速脉冲的计数可以获取辐射值的大小.然而放射源发出的射线是随机的,所以用闪烁计数器进行测量时,单位时间内的计数值会在一个平均值附近上下波动,即统计涨落问题.统计涨落影响着辐射值的测量精度,可以对辐射值进行递推平均滤波法处理.其方法为取连续采集的N条位置数据构成一个队列,长度固定为N,每次采集一条新数据放到队首,并扔掉最先采集的队尾的一条数据,然后对N条数据取算术平均值.实验表明:N值过大,会造成处理后数据滞后,且占用单片机资源;N值过小,处理效果不明显,达不到滤波处理的目的.每7.5 s对闪烁计数器的脉冲计数,取1 min内数据,即8个数据进行一次平均计数.设第i次采集的剂量信息为xi,用x(i)表示有效采集数据,即
x(i)=(xi+xi+1+…+xi+6+xi+7)/8,i=1,2,…,n.
(1)
同一放射源,在监测仪器和放射源距离不同时,测得结果不同.在不同距离下,对安全范围内放射源的剂量进行标准剂量仪和闪烁计数器的检测对比,得出放射性剂量与脉冲数之间的关系曲线.建立脉冲数和剂量值的标定关系回归模型,根据实际情况,采用线性回归算法,得出放射源剂量和脉冲数之间的关系为
y=β0+β1x+e,
(2)
式中:β0是回归常数;β1是回归系数;x是回归变量;e是随机误差.为了便于估计和假设实验,假设:
(3)
其中:E(e)表示随机误差的均值;D(e)表示随机误差的方差;σ表示标准差.由此得到脉冲和剂量的回归模型为
y~N(β0+β1x,σ2).
(4)
图7为放射源剂量和采集到的脉冲数之间的线性拟合曲线图.

图7 线性回归曲线
2.2 位置数据自适应Kalman滤波处理
运输放射源的车辆在林荫道、城市峡谷等复杂环境下,由于卫星定位导航系统的观测粗差会引起定位精度的误差,因此采用滤波算法对含有干扰的定位数据滤波处理.而在车辆运输过程中,行驶路线可能会发生变化,自适应Kalman滤波器可以对夹杂各种噪声的信号分离出有用的信号[14-15],能够有效的抑制异常,是精密单点定位中常用的一种策略[16].
自适应卡尔曼滤波与标准卡尔曼滤波在递推上基本一致,不同点在于观测模型中测量噪声的方差采用等价方差进行替换,表示为:
(5)

3 系统性能测试与分析
图8为放置在外壳内的硬件现场测试实物图,包含天线和供电电源线.为了验证系统对放射源位置和剂量信息监测的有效性和准确性,仅使用终端设备在兰州交通大学校门前某主干道模拟运输时位置信息,在实验室测试存储状态下位置信息和剂量信息.测试道路长度约1 km.图9为上位机监控系统主界面部分截图,应用程序基于VS下的WinForm设计[15],主界面数据模式下列表显示放射源的具体信息,当剂量和位置超过阈值时,报警并显示异常.

图8 硬件现场测试实物图
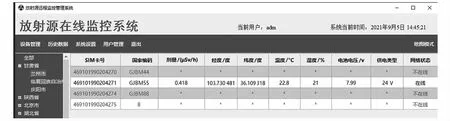
图9 放射源远程监控软件主界面
测试所用放射源活度为1.665×105Bq,即4.5×10-5Ci的137Cs放射源,环境温度为(30±1)℃,湿度为13%,计数时间为5 s,保持标准测量设备和系统下位机距离放射源一样,测量结果如表1所列.
表1中5组数据分别是在距离放射源不同距离下测得的多个剂量当量率数据的平均值,结果表明:与标准测量仪测得结果相比,平均相对误差为6.02%.

表1 放射源测量数据
为了测试系统定位功能,保证数据准确,在测试路段,运输车辆以相对稳定速度前行,北斗定位模块采样间隔为1 s,处理器将采集到的经纬度信息进行坐标转换,得到本设计选取的平面坐标系下的坐标;然后将平面坐标进行自适应Kalman滤波,得到预测的位置信息.图10为自适应卡尔曼滤波后的效果.
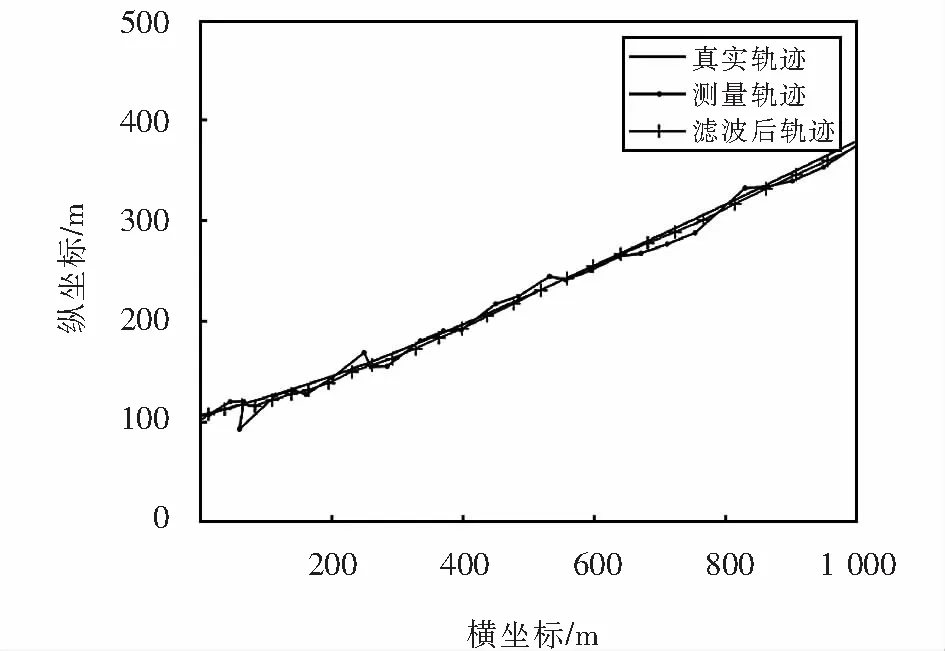
图10 自适应Kalman滤波前后效果对比
由图11可知,经过Kalman滤波处理后,位置精度误差由11 m变为4 m,能够有效抑制定位模块测量值和放射源实际所处的位置值,得到更加准确的放射源位置信息,提高系统的精确性和可靠性.通过在上位机监测平台下的地图模式:由图12(a)可以观测到放射源存储状态下的位置信息,同时鼠标悬浮下弹窗显示相关信息;在运输状态下,还可以显示车辆运输轨迹(见图12(b)).

图11 滤波前后误差对比

图12 放射源监控系统地图模式界面
4 结论
针对放射源管理不完善导致剂量泄露和丢失的问题,设计了一种具有预警功能的放射源实时监控系统.本文所设计的系统集5G通信技术、BDS定位技术、嵌入式技术、数据库技术于一体,实现了对放射源的远程实时监控;利用5G无线传输速率高、接入速度快的特点,较有线通信有更好的便捷性和移动性,进而实现数据的实时传输;运用BDS技术实现对放射源的定位和轨迹跟踪.对剂量脉冲滑动平均滤波和线性拟合,处理后与标准剂量相比,平均相对误差为6.02%;为了消除传感器误差,对位置数据进行自适应Kalman滤波处理,滤波后定位误差由11 m降低到了4 m;最后在兰州某设计院和兰州交通大学实验室进行系统性能测试.多次测试结果表明:自适应Kalman滤波降低了数据误差,提高了位置数据的准确性;上位机界面能够对放射源环境剂量和位置数据实时可视化显示,超出阈值时发出预警信息.
