一种地埋式污水处理厂巡检机器人机械结构设计与分析
2021-12-28汪名峰施海仁李驰骋冯玲玲
汪名峰 施海仁 李驰骋 冯玲玲


摘 要:生物反应池是污水处理厂面积最大的恶臭污染源散发源,特别是地埋式污水处理厂,生物反应池还肩负着人员巡视、设备运输的要求,因此必须加盖。污水处理厂生物反应池加盖,建成后看不见反应池内的情况,无法了解曝气状况。目前,在池板上开观察孔,工作人员目测观察情况为主,存在工作人员工作强度大,具备一定的危险性等情况。针对此类现象,文章设计了一种地埋式污水处理厂巡检机器人,可有效解决此类巡视难题。文章对巡检机器人的系统总体设计方案、机械结构组成、驱动装置等进行了设计分析,通过ANSYS软件仿真和实物测试的方法,设计并验证了巡检机器人在轨道上的可靠运行,以供相关人员参考。
关键词:巡检机器人;机械结构;轨道强度仿真;救援
中图分类号:TH113 文獻标识码:A 文章编号:1674-1064(2021)11-0-04
DOI:10.12310/j.issn.1674-1064.2021.11.011
随着土地资源的紧缺,城市空间被充分利用,越来越多的市政设施(污水处理厂、调蓄池等)趋向于半地下式和全地下式建设,由此导致了后期运行维护过程不便、影响维护人员安全等问题。文章中的巡检机器人是为适应污水处理厂及调蓄池等趋于地下式发展的需求,解决运行维护困难等问题,而研制开发的一款基于轨道的倒挂式行走巡检机器人,集成安装摄像头、温湿度、气体等多种传感器负载设备;其可以在生物反应池盖板下巡检,观察生物反应池的曝气情况,判断曝气强弱,实现对设备、环境的综合检测;而且,可以利用其自身的移动功能,通过后台设定机器人巡检方案,实现对污水处理厂及调蓄池的全天候、全方位、全自主巡检和监控。
1 系统总体设计
1.1 巡检系统总体设计方案
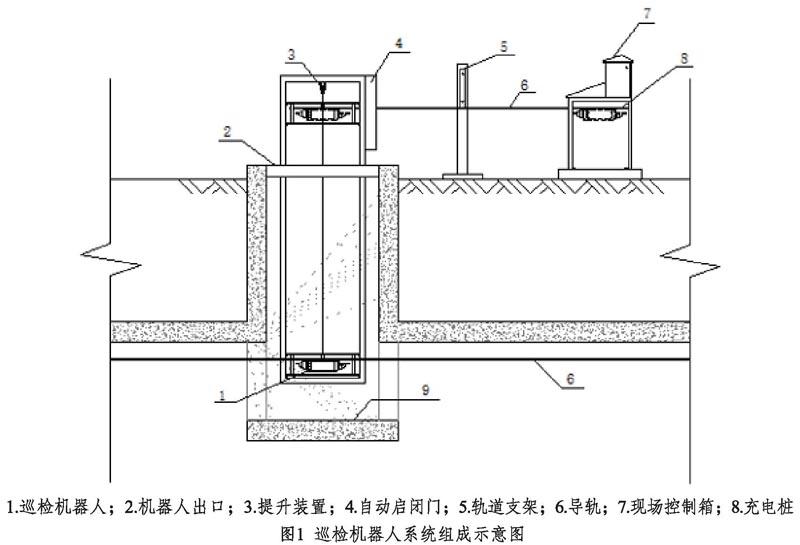
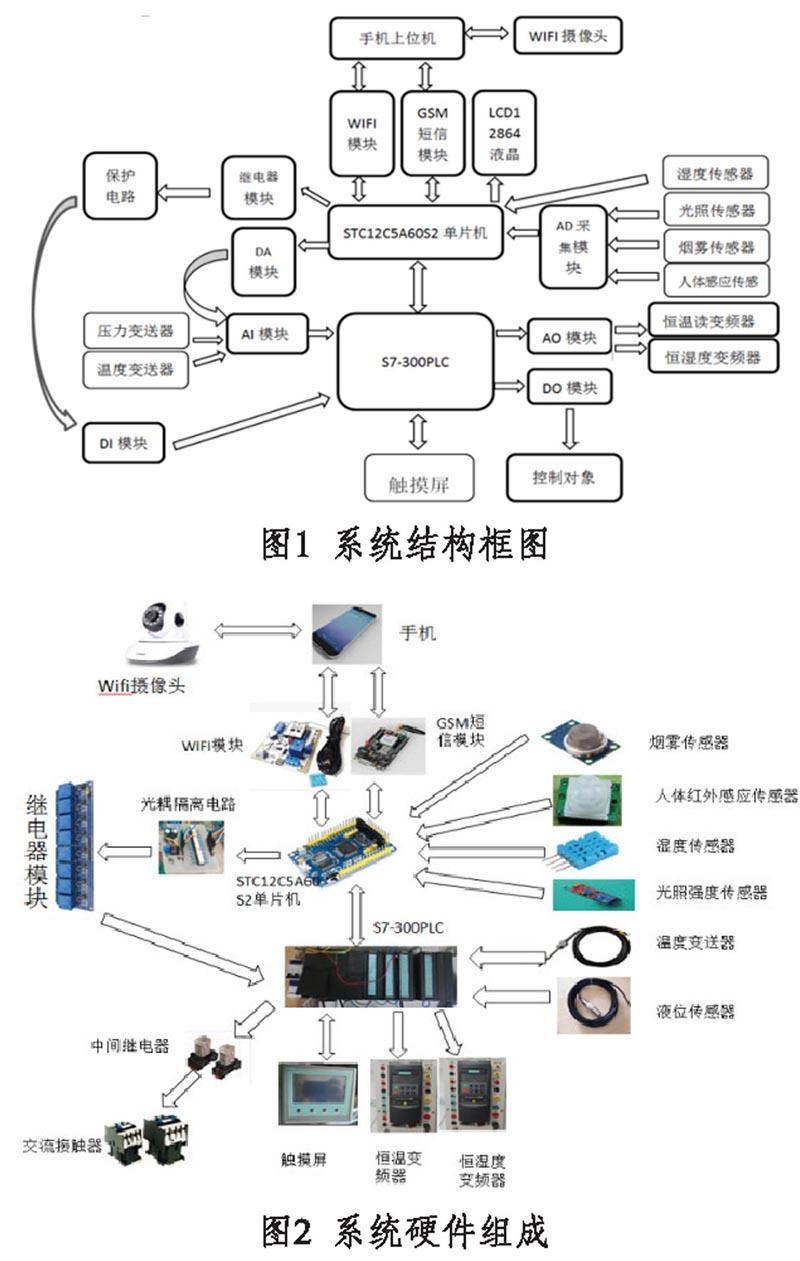
巡检机器人系统主要由巡检机器人、充电桩、现场控制箱、轨道、轨道支架、提升装置、电动门及通信系统、综合管理平台组成,如图1所示。
巡检机器人沿固定安装轨道运行,通过搭载的防爆摄像头可实时采集检测区域内的污水参数和水面曝气状态等信息;充电桩安装于生物反应池混凝土盖板上方,用于向机器人充电;导轨从充电站开始敷设,向下通过自动启闭盖板后进入生物反应池内,固定在生物反应池盖板下方。巡检机器人进出的孔洞采用自动启闭盖板密封,能与巡检机器人联动;巡检机器人通过无线通信系统将数据实时传输至充电站,充电站与全厂中央控制室设置主网通信网络,将数据传输给综合管理平台;综合管理平台设置在全厂中央控制室内,可以判别生物反应池的曝气状态,对巡检机器人的巡检进行监控和管理,自动进行报警、形成报表等[1]。
1.2 巡检机器人总体设计
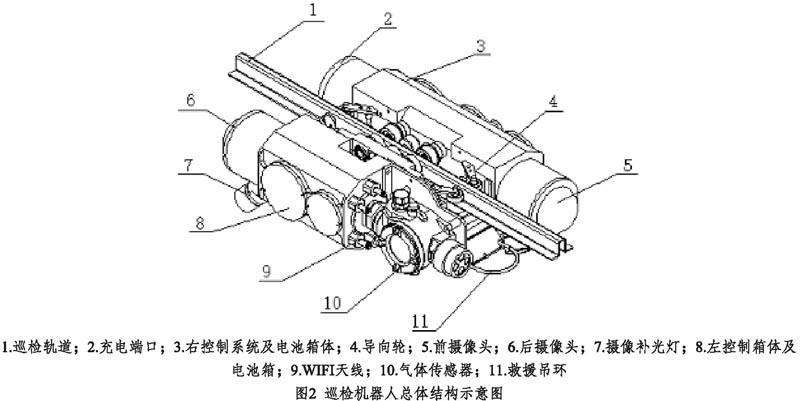
巡检机器人总体结构由动力机构、左箱体、右箱体、连接筒、防爆探头、防爆摄像头、镍镉电池组以及电源转换板、控制板等组成,其中锂电池组、电源转换板、控制板等安装于左右箱体内,其余部分与外界环境接触。充电采用非接触式充电方式,利用变压器原理,内外电极组成充电磁芯,利用感应电流实现充电操作,外露电极无电流电压,如图2所示。
2 机械结构设计
2.1 轨道设计
按巡检机器人巡检路径布局形式,轨道结构可由直轨道及弯轨道等组成。其中,直轨道结构形式采用“几”字形结构,可使用成型机对不锈钢板进行加工,具备成型效果好、驱动轮行走面平面度高等优点,其材质均采用304或316不锈钢,表面做钝化处理。
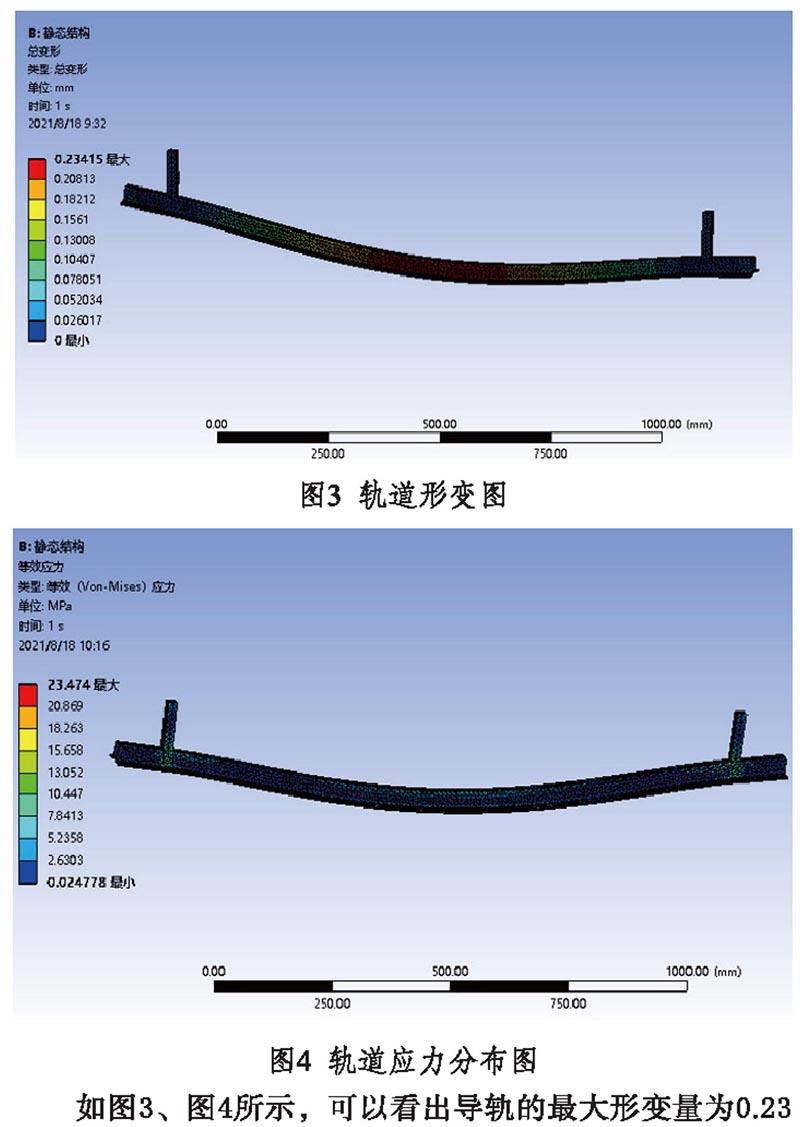
对于直轨道,单根长度为1.5 m;笔者建立模型,导入ANSYS有限元分析对其进行受力分析,模拟工程使用中轨道安装的情景,对导轨的两安装端添加固定约束,模拟2组悬吊轮对导轨施加压力向下方向的载荷,取值F=300 N,主要分析整个导轨的形变和应力[2]。
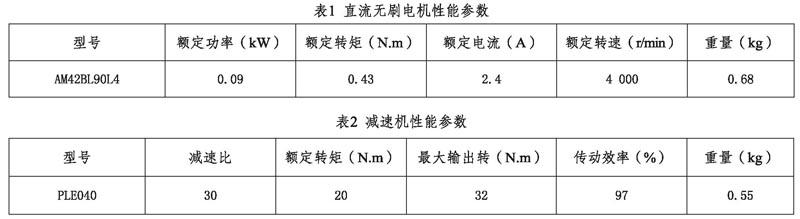
如图3、图4所示,可以看出导轨的最大形变量为0.23 mm,此数值很小,对巡检机器人的稳定运行不会造成影响,同时通过受力图可以看出,轨道中间和固定位置出现的最大等效应力为23.4 MPa,远小于材料的屈服强度207 MPa。通过软件受力分析得到结论,轨道承载力足够满足使用需求,结构合理。
对于弯轨道,设计为90°弯的结构形式,保证巡检机器人通过性好,其最小弯曲半径由巡检机器人长度和前后悬吊轮的间距决定,笔者在此设计最小弯曲半径为1.2 m。
2.2 驱动装置设计
2.2.1 驱动阻力的计算
巡检机器人在水平导轨上匀速行驶时,阻力主要来源于导轨的滚动阻力和空气阻力;巡检机器人必须首先克服最大静摩擦力,才能保证能启动,正常行驶时滚动阻力总是比静摩擦力小得多,因此,计算启动阻力即可[3]。
最大静摩擦力用符号F1表示,空气阻力用符号F2表示;同时,当巡检机器人在轨道上行驶时,因为轨道安装等因素,轨道存在一定的坡度,因此还必须克服重力沿轨道的分力,称为坡度阻力,用符号F3表示;巡检机器人加速行驶时需要克服的阻力称为加速阻力,用符号F4表示。因此,巡检机器人运行的总阻力为:
∑F=F1+F2+F3+F4
最大静摩擦力的计算:
F1=μ*FN
式中:μ为最大静摩擦系数,即驱动轮滚动临界时所需的推力与对应导轨的正压力FN之比。通过试验,笔者取静摩擦系数μ=0.6进行计算:
F1=0.6*300=180(N)
空气阻力的计算。空气阻力F=KV,其中,K为空气阻力系数,计算公式为:K=ρ*V2*C*A/2;式中,ρ为空气密度;V为速度,C为空气阻力系数,A为巡检机器人迎风面积。因为巡检机器人行驶在相对密闭的室内空间,同时,机器人迎风面积也比较小,因此,空气阻力对巡检机器人行驶的影响忽略不计。因此,计算F2=0(N)。
坡度阻力的计算。轨道因为安装问题,存在较小的安装坡度,取最大安装坡道角为α=5°,则坡道阻力为:F3=G*sin5°=26.1(N)。式中,G为巡检机器人重力。
加速阻力的计算。巡检机器人在加速行驶过程中,因加速运动时产生的惯性力,即加速阻力F4;设巡检机器人从起始静止状态经过位移S=l m时,其车速达到最大值Vmax=1.2 m/s,则巡检机器人的加速度为:a=Vmax/2=1.2/2=0.6m/s2。
故加速阻力为:F4=m*a=18(N),因此巡检机器人运行的总阻力为:
∑F=F1+F2+F3+F4=224.1(N)
结合巡检机器人轨道的结构形式,笔者分别对直轨状态下起动和弯轨状态下起动进行分析:
直轨状态下起动。牵引巡检机器人运动的驱动力与速度,不仅取决于电机功率和减速器,同时还受到主动轮直径大小的影响,主动轮直径越大,运动速度将增大,驱动力则减小;相反,主动轮直径变小时,最后的运动速度将降低,驱动力则增大;结合巡检机器人的结构外形尺寸,设计主动轮直径D=87 mm。因为总的运动阻力为:ΣF=224.1 N,则总的运动阻力矩为:∑T=∑F*D/2=9.75(Nm)
因此,驱动系统电机驱动力矩至少为:T=9.75 Nm,同时要考虑留有一定的余量。
弯轨状态下起动。巡检机器人在转弯状态下,行驶速度为直轨状态下行驶速度的1/3,笔者取速度V=0.4 m/s;设开始起动后1 s内达到正常运行速度,取最大值0.4 m/s进行计算;巡检机器人转向时,因单电机驱动,主动轮行驶速度相比直轨状态下较小,因此,总的运动阻力矩比直轨状态下小[4]。
2.2.2 电机及减速器机的选定
按照巡检机器人驱动力的计算需求,综合电机和传动装置的尺寸、重量、成本等多因素,直流无刷电机输出功率选为90 W,其性能参数如表1所示。
然后确定传动装置的总传动比:总传动比i=30;选用纽卡特行星减速机,该减速机结构紧凑、回程间隙小、精度较高,其性能参数如表2所示。
因此,总驱动力矩T=0.43*30*97%=12.5(Nm),满足设计需求。
2.3 救援装置
在设计过程中,笔者考虑到巡检机器人运行到地下水池内部时,由于驱动或机械故障,会导致巡检机器人无法返回检修平台或充电桩,因此笔者为巡检机器人设计救援装置,由救援机器人对其进行牵引并拉回检修平台。
巡检机器人前后端均设计有拉环机构,当操纵救援钩至巡检机器人的拉環机构时,内置的弹性装置会削弱巡检机器人的驱动轮与轨道之间的摩擦力,从而使巡检机器人能够被牵引回检修平台。
3 实物测试及分析
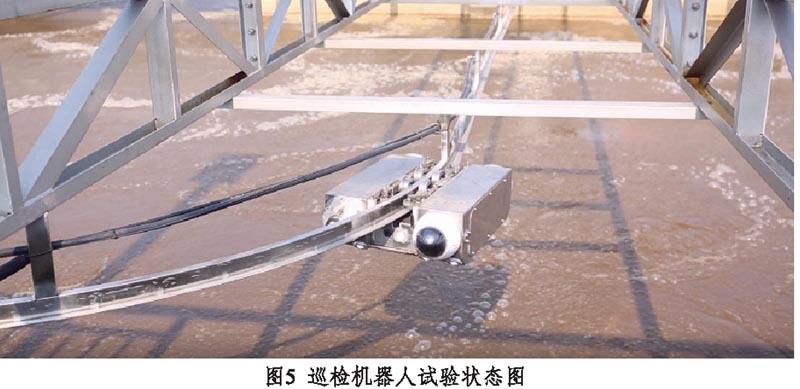
根据巡检机器人测试需求,笔者搭建了巡检机器人测试系统,包含巡检轨道、安装支架、变轨装置、充电桩及现场控制箱等。巡检机器人试验状态图如图5所示。
巡检机器人试验装置主要由以下几部分组成:
巡检轨道:用于巡检机器人运行导向支撑,巡检机器人沿轨道行走并进行工作;该轨道分为直轨道、水平弯轨等;
安装支架:用于巡检轨道吊挂支撑,采用方管焊接,支架放置在水平横梁上,局部做加强处理,满足试验轨道强度的要求;
变轨装置:通过电动推杆运行,实现直轨与弯轨变换。当变轨装置变为弯轨时,使巡检机器人在闭环轨道上运行完成巡检任务;当变轨装置变为直轨时,巡检机器人可从充电桩驶入巡检轨道,或者机器人巡检完成后从巡检轨道返回充电桩进行充电;
充电桩:巡检机器人完成巡检后返回充电桩中,在充电桩内为巡检机器人充电;
现场控制箱:巡检机器人现场控制箱用于控制电动门与巡检设备联动,控制变轨装置配合巡检任务,随时变更直轨或弯轨,以及控制巡检机器人充电回路;现场控制箱配置有触摸屏,可实现巡检机器人现场控制,执行相应的巡检任务。
4 结语
通过对巡检机器人及巡检机器人控制平台的多次试验,巡检机器人本体机械结构性能得到了验证,具体为巡检机器人的运动功能、轨道运行及爬坡提升能力等方面满足工程功能需求。目前,该巡检机器人在上海白龙港污水处理厂、肥东店埠河调蓄池等项目上投入使用,该机器人可有效解决人工观测生物反应池水面曝气难题,观察调蓄池内部设备及进行环境的综合检测,从而实现污水处理厂等的自动化维护管理。
参考文献
[1] 李滨.智能巡检机器人系统在地下式污水处理厂的运用[J].自动化应用,2020,41(4):77-79.
[2] 云亚文,高培源,雍明超,等.管廊巡检机器人机械结构设计与分析[J].数字技术与应用,2019,37(9):129-133.
[3] 刘璘.巡检机器人机械结构设计研究[J].赤峰学院学报(自然版),2012(24):73-75.
[4] 刘伟,王银斌,刘国强,等.机器人智能巡检技术在城市综合管廊中的应用[J].给水排水,2019,45(2):122-128.
