带吊挂负载的四旋翼无人机双模糊滑模控制
2021-12-28王晨悦胡盛斌高福海卢帅多
王晨悦 胡盛斌 高福海 卢帅多



摘 要: 为了提高带吊挂负载的四旋翼无人机轨迹跟踪性能,设计了一种双模糊滑模控制器,在削弱抖振的基础上自适应调节所构建滑模面的斜率。仿真结果表明,双模糊滑模控制器优化了快速性指标;跟踪控制调整时间有所减少;对速度跟踪的稳态误差有一个良好的控制效果,该策略的有效性和稳定性得到了验证。
关键词: 滑模控制; 模糊控制; 四旋翼无人机; 内外环结构
中图分类号:TP391.9 文献标识码:A 文章编号:1006-8228(2021)12-14-08
Abstract: In order to improve the trajectory tracking performance of a four-rotor UAV with a suspended load, this paper designs a double fuzzy sliding mode controller, which adaptively adjusts the constructed sliding mode on the basis of weakening chattering. The simulation results show that the dual fuzzy sliding mode controller optimizes the rapidity index, reduces the adjustment time of tracking control, and has a good control effect on the steady-state error of speed tracking, which verifies the effectiveness and stability of the strategy.
Key words: sliding mode control; fuzzy control; UAV; inner and outer ring structure
0 引言
許多学者已经研究很多关于带吊挂负载的四旋翼无人机先进控制或策略。奥堡大学建立直升机负载动力学模型[1]。文献[2]中Omar对直升机的负载盘旋飞行进行了研究,并仿真;文献[3]中主要研究无人机吊挂系统的起飞过程;文献[4]利用非线性预测模型的控制方法实现对无人机的位置和姿态的跟踪,它们在平衡点处达到良好的控制效果,但不能保证偏离平衡点严重时闭环的稳定性;文献[5]研究两架无人机通过绳索拉起负载;文献[6-7]中都运用了微分平滑的方法,在空间仿真验证该方法的可行性,但微分平滑方法的设计控制算法困难。南京航空航天大学的安帅团队对四旋翼无人机变负载,在外环运用了自适应滑模控制,对于内环则运用了自抗扰控制方法[8]。
本文首先建立四旋翼无人机的动力学模型,在其动力学模型的基础上,充分考虑负载质量对数学模型的影响,运用Newton-Eule方法,建立了变负载吊挂旋翼无人机动力学模型。针对系统所存在抖振的现象设计了模糊滑模控制器(FSMC),然后设计双模糊滑模控制器(DFSMC)通过调节滑模面的斜率,来减少控制跟踪调整时间,提高位姿跟踪精度的效果,最后在相同负载质量下,对滑膜控制、模糊滑模控制、双模糊滑模控制三种方法进行仿真,并分析对比这三种方法在性能指标上的表现。
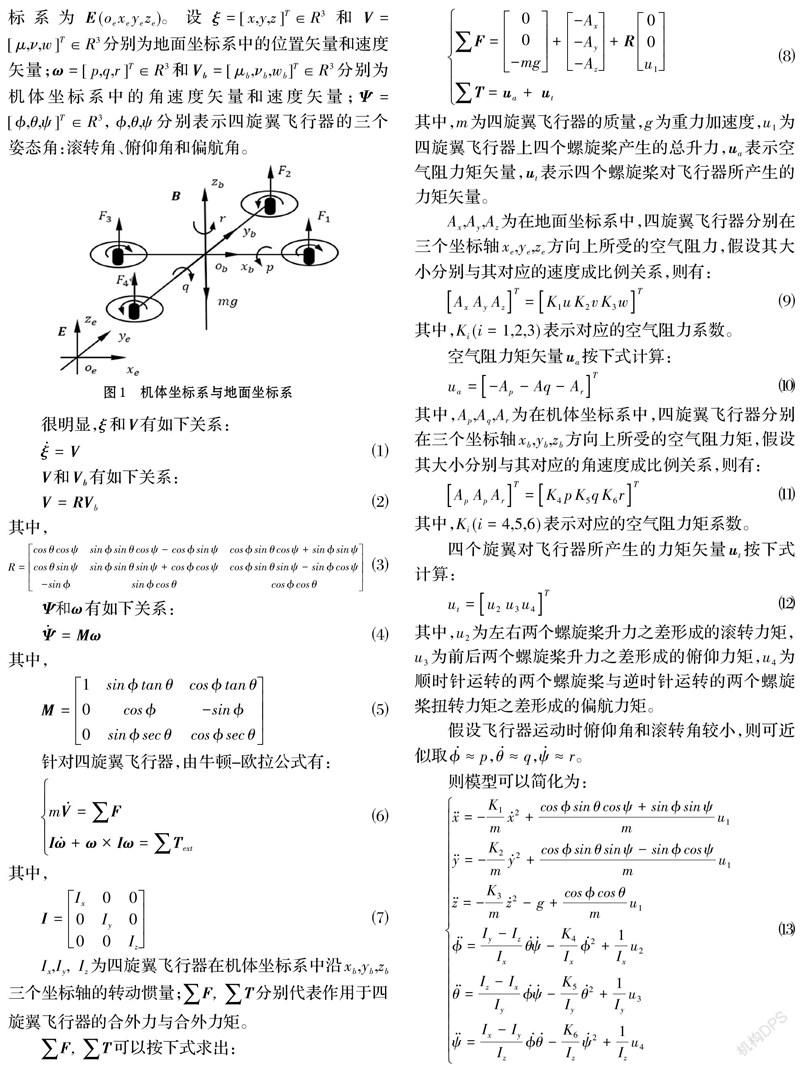
1 建立带吊挂负载的四旋翼无人机的动力学模型
1.1 一般四旋翼飞行器动力学模型
其中,[m]为四旋翼飞行器的质量,[g]为重力加速度,[u1]为四旋翼飞行器上四个螺旋桨产生的总升力,[ua]表示空气阻力矩矢量,[ut]表示四个螺旋桨对飞行器所产生的力矩矢量。
其中,[u2]为左右两个螺旋桨升力之差形成的滚转力矩,[u3]为前后两个螺旋桨升力之差形成的俯仰力矩,[u4]为顺时针运转的两个螺旋桨与逆时针运转的两个螺旋桨扭转力矩之差形成的偏航力矩。
1.2 带吊载的四旋翼飞行器动力学模型
如图2所示,假设吊载线与地面坐标[xe]轴成[α]角,与地面坐标[ye]轴成[β]角,与地面坐标[ze]轴成[γ]角,吊载的质量为[∆m],吊载对飞行器的作用力为[T]。
通过以上相同推理可得带吊载的飞行器简化模型为:
2 系统控制器设计
2.1 滑模控制
2.1.1 位置控制环滑模控制器设计
首先通过设计控制率[u1],实现[x→xd,y→yd,z→zd]。
定义三个虚拟控制量:
则用来描述旋翼平台位置状态的动力学模型为
定义滑模函数为:
对于式⒄中第一个位置子系统,求[S1]得:
2.2 模糊滑模控制
2.2.1 位置控制环模糊滑模控制器设计
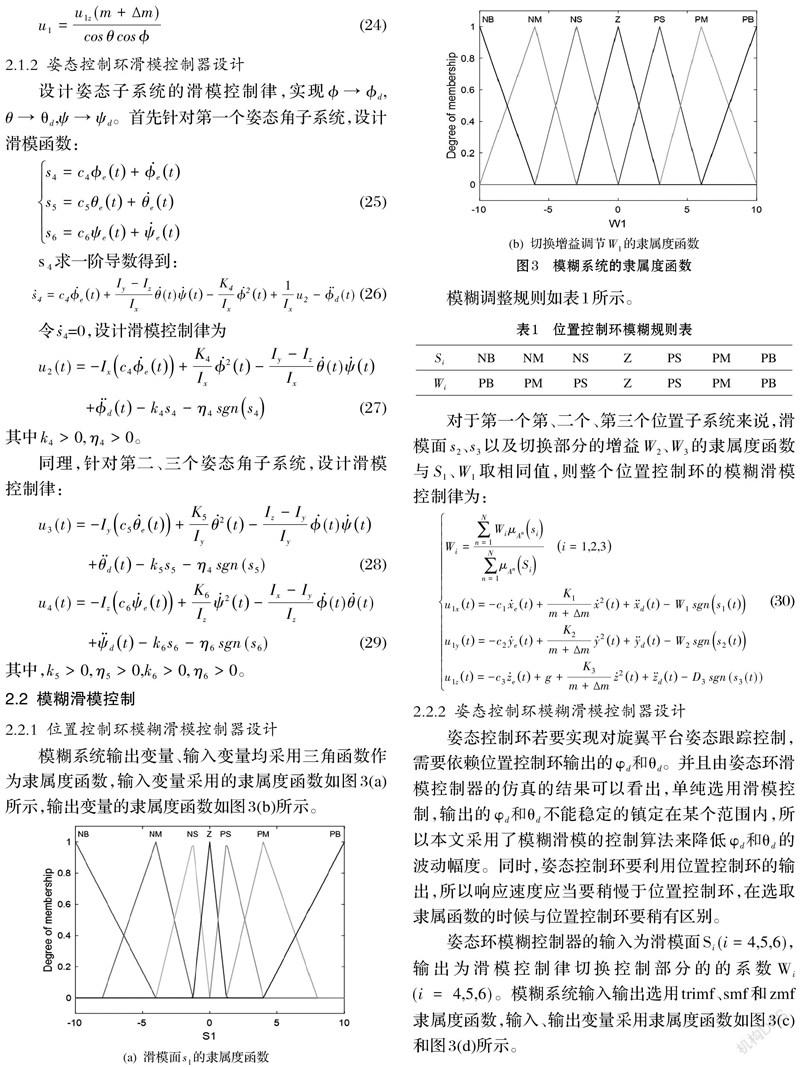
模糊系统输出变量、输入变量均采用三角函数作为隶属度函数,输入变量采用的隶属度函数如图3(a)所示,输出变量的隶属度函数如图3(b)所示。
模糊调整规则如表1所示。
对于第一个第、二个、第三个位置子系统来说,滑模面[s2]、[s3]以及切换部分的增益[W2]、[W3]的隶属度函数与[S1]、[W1]取相同值,则整个位置控制环的模糊滑模控制律为:
2.2.2 姿态控制环模糊滑模控制器设计
姿态控制环若要实现对旋翼平台姿态跟踪控制,需要依赖位置控制环输出的[φd和θd]。并且由姿态环滑模控制器的仿真的结果可以看出,单纯选用滑模控制,输出的[φd和θd]不能稳定的镇定在某个范围内,所以本文采用了模糊滑模的控制算法来降低[φd和θd]的波动幅度。同时,姿态控制环要利用位置控制环的输出,所以响应速度应当要稍慢于位置控制环,在选取隶属函数的时候与位置控制环要稍有区别。
姿态环模糊控制器的输入为滑模面[Si(i=4,5,6)],输出为滑模控制律切换控制部分的的系数[Wi]
[(i=4,5,6)]。模糊系统输入输出选用trimf、smf和zmf隶属度函数,输入、输出变量采用隶属度函数如图3(c)和图3(d)所示。
模糊规则如表2所示。
对于第一个、第二个、第三个姿态子系统来说,滑模面[s5]、[s6]以及切換部分的增益[W5]、[W6]的隶属度函数与[s4]、[W4]取相同值,则整个姿态控制环的模糊滑模控制律为:
2.3 双模糊滑膜控制
2.3.1 位置控制环双模糊滑模控制器设计
模糊滑模控制很明显改善了抖振,但是却没有解决控制系统调整时间整体偏长的这一问题,控制系统在“快速性”这一控制指标上的表现不是很好。从之前的分析可知,当闭环系统渐进稳定时,滑模面的收敛速度由滑模面系数决定,即滑模面的斜率c。因此,可以再设计一个模糊控制器,根据误差[xe,ye,ze,ϕe,θe,ψe]的值以及误差导数[xe, ye,ze, ϕe,θe,ψe]的值的变化情况来自适应的调整所设计的滑模面系数[cq1,cq2,cq3,cq4,cq5,cq16]值大小,从而缩短调整时间,加快控制响应的速度。
针对第一个位置子系统,设计双模糊滑模控制律:
其中,[cq1]为调整系数。
选用trimf、smf和zmf隶属度函数实现输入模糊化,模糊规则表如表3所示[9]。
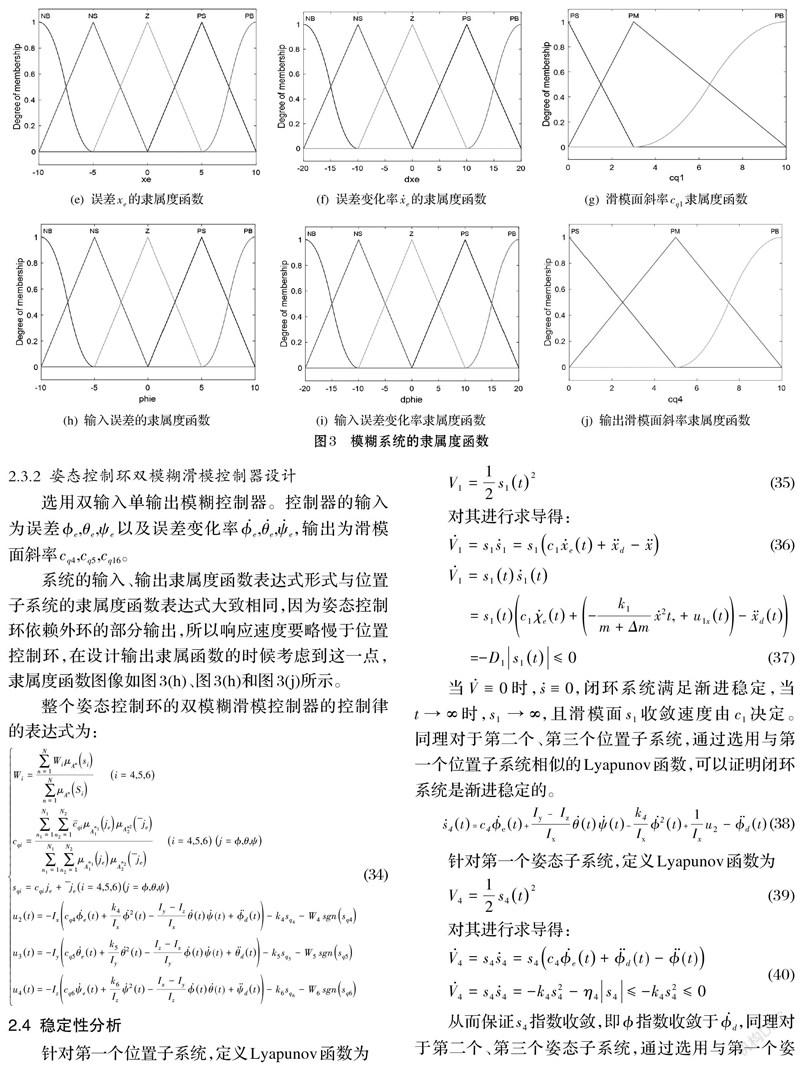
模糊控制器的输入[xe],[xe]和输出[cq1]的隶属度函数分别如图3(e)、图3(f)和图3(g)所示。
对于第一个、第二个、第三个位置子系统,输入误差[ye,ze]、误差变化率[ye,ze]以及输出滑模面斜率[cq2,cq3]的隶属度函数与[xe]、[xe]、[cq1]取相同值,则整个位置控制环的双模糊滑模控制器为:
2.3.2 姿态控制环双模糊滑模控制器设计
选用双输入单输出模糊控制器。控制器的输入为误差[ϕe,θe,ψe]以及误差变化率[ϕe,θe,ψe],输出为滑模面斜率[cq4,cq5,cq16]。
系统的输入、输出隶属度函数表达式形式与位置子系统的隶属度函数表达式大致相同,因为姿态控制环依赖外环的部分输出,所以响应速度要略慢于位置控制环,在设计输出隶属函数的时候考虑到这一点,隶属度函数图像如图3(h)、图3(h)和图3(j)所示。
整个姿态控制环的双模糊滑模控制器的控制律的表达式为:
2.4 稳定性分析
针对第一个位置子系统,定义Lyapunov函数为
同理对于第二个、第三个位置子系统,通过选用与第一个位置子系统相似的Lyapunov函数,可以证明闭环系统是渐进稳定的。
针对第一个姿态子系统,定义Lyapunov函数为
对其进行求导得:
从而保证[s4]指数收敛,即[ϕ]指数收敛于[ϕd],同理对于第二个、第三个姿态子系统,通过选用与第一个姿态子系统相似的Lyapunov函数,可以证明闭环系统是渐进稳定的。
3 仿真研究
带吊挂负载的四旋翼无人机物理参数如下:
轨迹跟踪指令设置为
选取12个状态变量为:[ x,x,y,y,z,z,. ϕ,ϕ,θ,θ,ψ,ψ]4个输入变量为:[u1, u2,u3u4]并把所有12个状态都输出。初始状态为:[1.5;0;2.5;0;0;0;0.08;0;0.06;0;0.2;0]。
在MATLAB R2018a中编写程序进行仿真实验,仿真实验结果如图4-图6所示,图4为模糊滑模仿真结果。图5为双模糊滑模控制仿真结果,图6为三种方法仿真结果对比图。
对比图(a)、图4(b)、图5(a)、图5(b)、图6(a)、图6(b)位置跟踪对比和姿态跟踪对比可以看出双模糊滑模控制相比于模糊滑模控制,大大提高了相应速度,缩短了调整时间,说明对滑模面斜率c的模糊控制器起到了加快响应速度,缩短调整时间的作用实现了设计目标。
对比图4(c)、图5(c)、图6(c)控制律可以看出,模糊滑模控制存在较为严重的抖动,但双模糊滑模控制的控制律几乎不存在抖振现象。说明对滑模切换项D的模糊控制器起到了消除抖振的作用。
对比图4(d)、图5(d)、图6(d)三种控制方法飞行器运行轨迹跟踪对比结果可以看出,三种控制器同样能飞行器运行轨迹进行稳定的跟踪;模糊滑模控制器很好的削弱了滑模控制器跟踪过程中出现的抖振现象;双模糊滑模控制器缩短了跟踪的调节时间,准确性、快速性指标大幅改善。
4 结束语
双模糊滑模控制器设计,针对滑模变结构控制器与模糊滑模控制器所不能解决的控制跟踪调节时间偏长等问题,在模糊滑模控制器的基础上再加一个模糊控制器,从而设计成双模糊滑模控制器,通过位置、姿态等状态跟踪误差的变化情况,自适应的调节滑模面的斜率,于是便构成了双模糊滑模变结构控制器。该控制器使得系统状态以尽可能快的速度趋向于滑模面,达到缩短调节时间的目的。因为双模糊滑模控制器与单模糊滑模控制器是在滑模控制器的基础上利用模糊控制的特点,对相应的系数进行自适应调整,所以不需要进行单独的稳定性证明。仿真结果表明,双模糊滑模控制器对于抖振的改善以及调节时间的减少效果明显。系统在快速性指标上的表现的非常好。
参考文献(References):
[1] Bcrgatnasco M, Lovcra M, Identification of linear models for the dynamics of a hovering quadrotor[J].IEEE Transactions on Control Systems Technology,2014.22(5):1696-1707
[2] Omar H M. Designing anti-swing fuzzy controller for helicopter slung-load system nearhover by particle swarms[J]. Aerospace Science and Technology,2013.29(1):223-234
[3] Cruz P, Fierro R. Autonomous lift of a cable-suspended load by an unmanned aerial robot[A] //Control Applications. IEEE[C]. Juan Les Antibes, France: IEEE,2014:802-807
[4] Kim S, choi S, Lee H, Vision-based collaborative lifting using quadrotor UAVs[A].The 14th International Conference on Control, Automation and Systems (ICCAS) [C].Seoul, South Korea:IEEE,2014:1169-1174
[5] Dai S, Lee T, Bernstein D S. Adaptive control of a quadrotor UAV transporting a cable-suspended load with unknown mass[A].Decision and Control[C].Los Angeles ,CA,USA:2014:6149-6154
[6] Sreenath K, Michael N, Kumar V. Trajectory generation and control of a quadrotor with a cable-suspended load differentially flat hybrid system [A]//Karlsruhe, Germany: IEEE,2013:4888-4895
[7] Sreenath K, Lee T, Kumar V.Geometric control and differential flatness of a quadrotor UAV with a cable-suspended load [A]//52nd Annual Conference on. Decision and Control Florence Italy [C]. Florence,Italy:IEEE,2013:2269-2274
[8] 安帥,袁锁中,李华东.变负载四旋翼无人机的轨迹跟踪控制器设计[J].电光与控制,2018.25(3):59-63,86
[9] 胡盛斌,陆敏恂.多关节机器人反馈线性化双模糊滑模控制[J].机械科学与技术,2013.32:105-115