基于PLC的多中段提升机自适应速度控制及保护方法
2021-12-28李志杰坚德毅
李志杰,坚德毅
(1.甘肃工业职业技术学院,甘肃 天水 741000;2.天水电气传动研究所集团有限公司,甘肃 天水 741000)
矿井提升机是煤矿、有色金属等矿山行业生产过程中的大型关键设备,是井下人员与设备通往地面的唯一通道,其可靠性和性能直接影响到矿山的高效生产、作业人员的生命安全等。尤其对于矿井提升机电控系统,提高提升机系统性能与可靠性,是减少矿山事故的关键,其合理的控制逻辑是高效生产的重要影响因素。矿井提升机主要用于升降人员、矿石和材料等,其分类多样。本论文主要以按井道(井筒)、停车点分类的竖井多中段提升机为控制对象,对其全行程的速度控制及速度保护使用自适应算法,在竖井多中段提升机电控系统实际应用中突显出了外部检测设备少,生产效率高,运行保护可靠等优点,此控制方法同样也适用于斜井提升机。
为实现系统的动态性能,通过构建主从式网络拓朴结构,实现多点并行计算,各子节点完成计算后将结果回传至主节点进行汇总分析,再将分析后的最优控制指令下发至各个控制单元,在相同的扫描周期内获得更多的数据样本,缩短计算时间。
主控CPU是主从网络控制系统的主站,完成整个提升机电控系统的协作控制,是自适应速度保护及速度控制算法的核心。对传动系统下发控制指令,于传动系统采用PROFINET通讯,操作站是提升机电控系统的操控核心,主要完成提升机行程计算并将运算结果传送至主控CPU。信号CPU除处理提升信号外,还完成最优行程规划功能,并能屏蔽错误信号,将运算数据发送给主控CPU完成传动系统的控制。
1 自适应速度控制及保护原理
以13个提升中段,7种运行速度(不含爬行速度、检修速度等低速)的提升机为例;对于每个中段而言,无论是提升或下放作业时,到任一目标中段的运行速度都有出现这7种速度中某一特定速度的概率,而提升作业与下方作业时又对应不同的上与下减速点,因此,系统会存在168个减速点。而自适应算法依据精确的罐笼位置数据,采取程序算法计算出每个精准的减速点,从而取代掉繁多的硬件检测设备。
自适应算法的核心思路就是建立7种提升机下放运行的速度参考模型,依据开车信号搜索系统全局最优解的方法。其直接目的就是达到:①让提升机在特定行程范围内以安全的速度运行。②为各种运行速度选择最优减速点,保证安全减速距离的前提下,尽量缩短减速距离,达到高效生产目的。
为此,首先,传动系统需具备调速范围宽、动态响应块、控制精度高的特点,我们优选主从结构的双闭环直流调速传动方案来驱动一台直流电机,本文不再复赘。
其次,为了提高速度控制和速度保护曲线的精确度,首先要有较快的采样时间,其次要有精度较高的样本。为此我们采用了S71500系列的高性能CPU作为主控PLC,选用高精度增量式脉冲编码器及高速计数模块,并增加倍频计算功能来计算罐笼位置。这样就具备了自适应控制的基础环节,可以更加快速地掌握设备最新状态,提高控制的实时性。
最后为确保位置计算的可靠性,分别在滚筒与天轮上各安装一只编码器,对计算结果进行实时比较。
1.1 行程计算原理
行程计算时,机械结构特性、钢丝绳缠绕层数变化引起的滚筒直径变化、每层钢丝绳缠绕圈数不同等所带来的误差性问题都是需要考虑的关键因素,是控制系统最基本也是最重要的参数,为解决这一问题,我们采取分层累积算法,利用该算法我们成功地解决了行程控制中因钢丝绳均匀性差异导致误差的问题。
该算法的具体计算流程如下:
第一步,根据设备设定3个参数的取值区间。设KP∈[p1,p2],KI∈[i1,i2],KD∈[d1,d2]。
第二步,依据外部检测信号计算运行距离:

式中滚筒直径D,钢丝绳直径d,缠绕层数Kp,每层钢丝绳圈数Kd,机械系数Kt,脉冲数P。其中Kp的取值由Kd及外部信号决定。
这样,我们就得到了精度较高的提升机罐笼位置数据。
1.2 速度曲线计算
在提升机提升/下放运行前,信号系统所发出开车信号后,主控PLC程序依据加速度、运行距离提前经函数运算,生成速度图。信号系统发出运行命令后,判断本次运行所允许运行的最大速度:当本次提升距离大于S1时,提升机系统设定提升容器以最大速度V1运行,当本次提升距离小于等于S1,且大于S2时,提升机系统设定提升容器以最大速度V2运行,当本次提升距离小于等于S2,大于S3时,提升机系统设定提升容器以最大速度V3运行,如此往复,根据设计及工况需要,由运行距离确定出本次提升的最大运行速度Vmax1;再通过提升种类(如矿石、人员、检修等),确定出另一种最大速度Vmax2。两种最大速度相比较,取较小的一个速度设定为本次提升的最大速度Vmax。
根据呼叫提升容器的水平,确定本次运行的终止点d;根据此时提升容器的深度,确定本次提升的起始点o;按照工况要求,手动输入提升容器的爬行距离D;依据图2所示,根据不同的最大速度、固定的最大加速度、固定的最大急动度,程序计算不同的加速距离A及减速距离C,如式2所示。
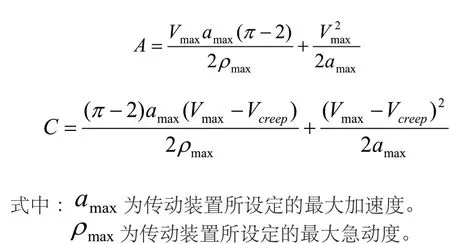
不同行程的理论运行速度。设加速段速度曲线为Voa,减速段速度曲线为Vbc,等速段速度为定值Vbc,通过如下函数计算,对应出不同位置的理论运行速度:
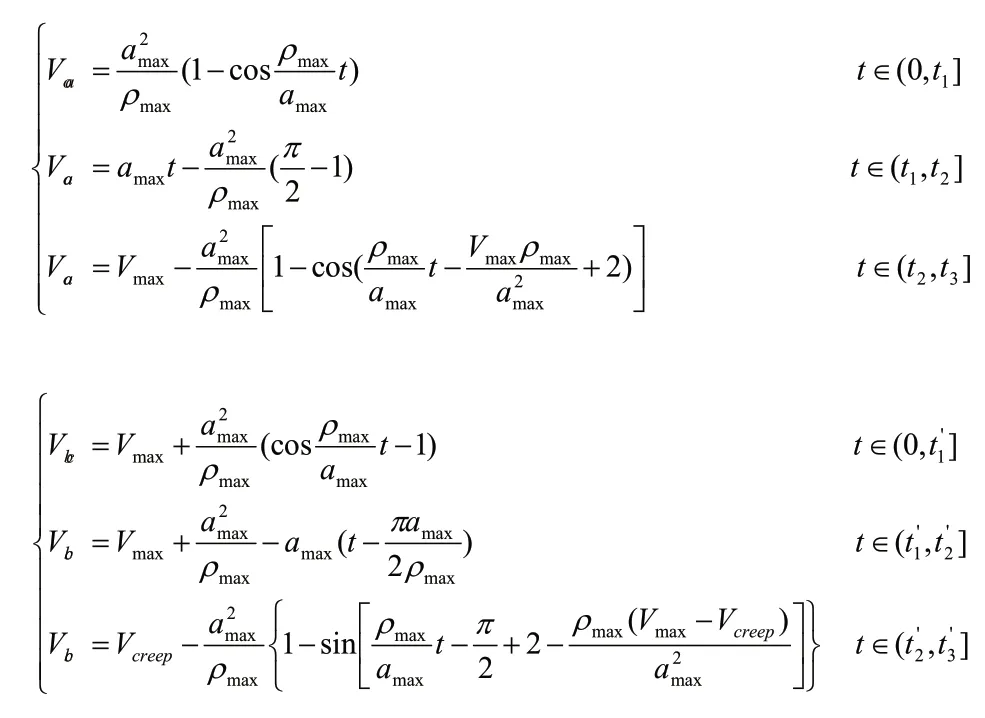
对于本文7种速度的提升机,需计算出7种速度图模型,并将其存储于数据库中,作为不同行程范围的速度控制及速度保护的参考模型。
1.3 速度控制自适应算法
为了实现多中段竖井提升机在不同的行程范围能以最优速度图为模型运行,根据提升信号的特征自动调用速度图模型和速度控制处理顺序,结构特征相适应,差别仅在于等速段的距离差异,可以根据外部信号调整,以取得最佳的处理效果。
自适应控制系统由1.2节计算出的速度图模型、速度给定的输出、反馈控制器和调整控制器参数的自适应机构等部分组成,包括内回路(主控程序)和外回路(开车信号)两个回路。内环是由被控对象和控制器组成的普通反馈回路,而控制器的参数则由外回路调整。参考模型的输出直接表示了对象输出应当怎样理想地响应参考输入信号S。
当输入s同时加到系统和模型的入口时,运行系统的输出y响应由开车信号确定的速度图模型模型yt,由于不同行程范围的组合方式繁多,模型yt与输出y不一定一致,结果将产生偏差信号e,且此偏差仅为等速段距离的偏差,由自适应程序机构监视此参数的实时变化,并当出现故障中段时,依据开车信号的变化具有修正输出y功能,当系统输出y=yt时,系统按照速度图模型运行。
1.4 速度保护曲线
在理论运行速度不大于判断出的最大速度的情况下,将各个区间的不同的理论运行速度放大5%至10%,作为全行程超速保护曲线的超速保护裕量,实际速度以曲线的方式越过全行程超速保护曲线所包络的范围,实际速度曲线一旦超过数字监控包络线,即图2实线超越虚线时,系统将会报超速故障,切断提升机软件安全回路,施闸停车。
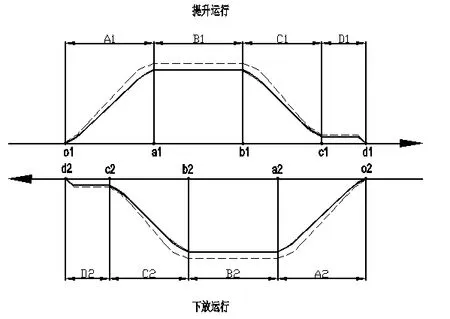
图2 速度包络曲线
2 结论
本文传统多中段竖井提升机速度控制及保护受限于初始化条件复杂,硬件设备多其实时性及精准度不高,在运行效率方面很难做到多速度作业,在速度保护方面仅在井口装设有减速开关,井筒中速度控制依靠司机操控,对操作员高度依赖,无论是运行效率还是安全系数都得不到保障。
自适应速度保护及速度控制算法不仅具有初始化条件简洁、硬件设备简洁,并且能够搜索系统全局最优解的优点,而且其自适应性可以更快地淘汰掉较差个体使算法的收敛效率更高。同时,它的在线模式可以实时地获取设备当前运行状态及关键数据,从而能够及时更新并调整参数,提高了系统的动态性、安全性,因此这种自适应算法特别适用于实时性要求较高的多中段矿井提升机自动控制系统中。
