倾斜摄影测量模型精度影响因素验证分析
2021-12-27原涛
原 涛
(核工业二〇八大队,内蒙古 包头 014010)
0.引言
“实景三维中国”成为“十四五”基础测绘规划编制的重点关注方向,基于新型成像系统的倾斜摄影测量技术以其独特的优势得到了广泛地关注和飞速地发展,已成为测绘领域一项新的技术手段。其通过多台传感器从不同的角度进行数据采集,通过内业处理能够快速、高效获取丰富的数据信息,真实反映地物的外观、位置和高度等属性信息,能够弥补传统人工模型仿真度低的缺点,并且在满足航空摄影测量要求的同时获得多种类型数据成果,可以有效降低三维建模成本,并且倾斜摄影测量技术属于全自动数据采集模式,数据采集效率高,因此在智慧城市建设、拆迁规划、智慧旅游和数字化警用系统等方面有着广泛地应用。但是在后期影像匹配时,由于比例尺、分辨率等差异,导致获取的数据中含有较多的粗差,影响空三解算精度,因此外业数据采集时,如何减少冗余信息,提高数据匹配精度是提高倾斜摄影测量技术实用性的关键。本文通过对比实验的方式,分析了不同像控点数量、不同重叠率和飞行高度对倾斜模型精度的差异,研究成果具有一定的生产针对性。
1.倾斜摄影测量理论基础
倾斜摄影测量是指相机主光轴有一定的倾斜角度时拍摄的影像,其采集镜头包括单镜头、三镜头、五镜头和九镜头,最常见的还是包括一个下视镜头和四个倾斜镜头(如图1所示),其搭载平台分为有人机和无人机,而无人机又分为旋翼型无人机、固定翼型无人机和复合翼型无人机。根据镜头和搭载平台不同又分为飞行高度在600m以上的大型平台、300m—600m的中型平台以及300m以下的小型平台。
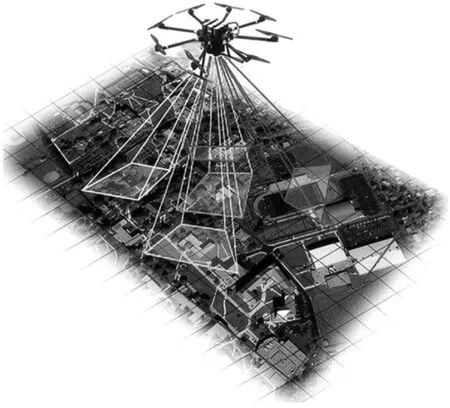
图1 倾斜摄影测量
内业倾斜模型生产,首先对数据进行预处理,包括处理航摄像片和POS数据,生成地物清晰、层系分明、反差适中、色彩鲜明以及色调一致的无畸变影像,然后通过POS数据中得到的倾斜图像外方位元素,采用由粗到精的金字塔匹配策略,在每一级像片上进行同名点的自动匹配以及区域网光束法平差,能够得到较好的同名点匹配结果。同一时刻,构建了连接点与连接线、POS数据与GPS/IMU数据的倾斜图像自检校区域网平差的误差方程,对其采用联合平差计算,来确保平差结果精度能够满足要求;再通过匹配策略或者基元的方式从倾斜图像中提取三维建模时需要的同名点;最后构成TIN三角网,生产出高分辨率和高精度的数字表面模型,基本流程(如图2所示):

图2 倾斜摄影测量三维模型重建基本流程
2.测区概况及影像数据采集
实验测区选择的是某农村居民区,地势较为平坦、房屋密集,建筑物以普通民宅等低矮建筑为主,测区面积约为2km2,高程变化范围在20m内,测区大部分地面坡度在25°以下,但是测区周边大都为山地地形,高程变化范围在300m范围内,测区范围(如图3所示):

图3 实验测区范围
由于测区范围不大,飞行时长较短,因此搭载平台选择的无人机是Phantom 4 RTK旋翼型无人机,该款无人机是大疆公司推出的小型多旋翼高精度航测无人机,面向低空摄影测量应用,具备厘米级导航定位系统和高性能成像系统,集成了测量精度高和机动灵活、响应迅速、携带方便、成本低廉、地面分辨率高、系统集成度高等诸多优点,因而在小区域测绘中得到广泛应用。相关技术参数(如表1所示):
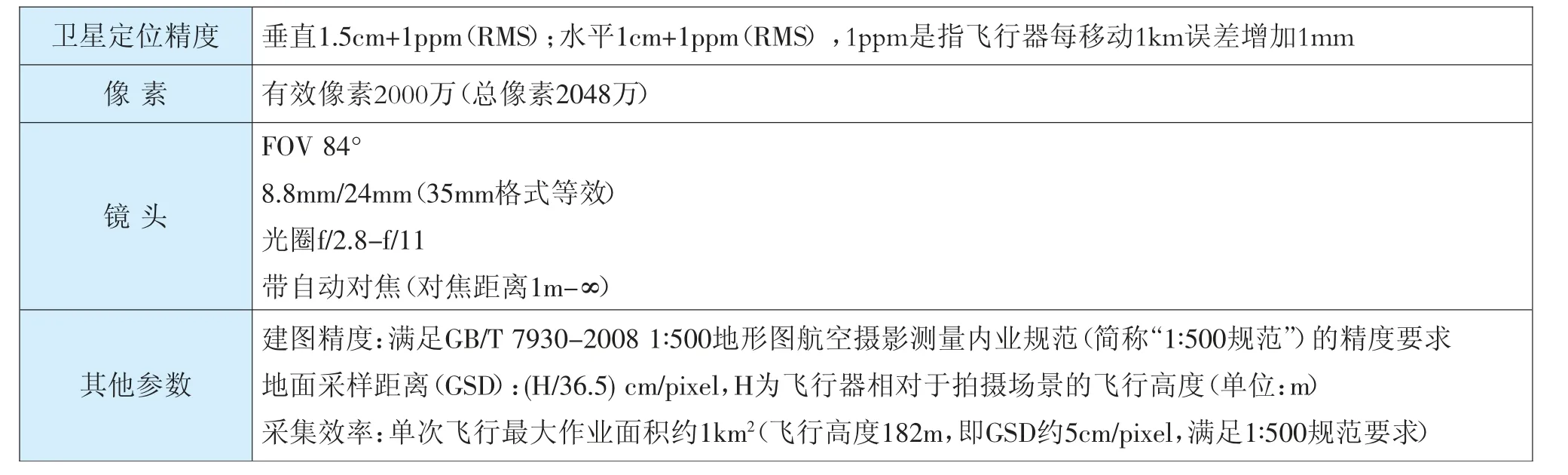
表1 Pha ntom 4 RTK无人机主要参数
传统的倾斜摄影测量技术都是同一个飞行平台搭载5台传感器,从“前、后、左、右、中”五个角度采集完整的影像数据,同时记录航高、航速、坐标信息、旁向和航向重叠率,然后对倾斜影像进行分析和整理。但是由于本实验选择的是多旋翼无人机,只有一个影像采集设备,因此为达到多传感器影像采集效果,实际作业时每个架次影像采集完毕,在不改变航线飞行路径前提下,设置不同飞行角度进行影像数据采集。
3.内业数据处理及模型精度验证分析
在不同实验验证条件下,将影像数据采集完成后,倾斜摄影测量三维建模选择的是Smart3D软件,整个项目过程主要分三部分:新建工程(包括导入照片、检查照片)、提交空三解算(包括一系列定义选择、打开引擎运算)和新建重建工程(包括空间框架设置、一系列生产项目定义选择)。倾斜摄影测量模型重建效果(如图4所示):

图4 倾斜摄影测量模型重建效果
3.1 像控点数量对模型精度影响分析
像控点是倾斜摄影测量控制加密和测图的基础,像控点布设方案选择直接模型成果的精度。其作用原理是在空三解算时,主要纠正无人机因定位受限或电磁干扰而产生的位置偏移、坐标精度过低等问题。因此,每个像控点都要按照一定标准布设,才能帮助内业更好地处理数据,提高倾斜模型精度。因此在实际倾斜摄影测量作业中都需要布设一定数量像控点,否则仅依靠无人机内部定位系统精度难以满足相关规范要求。
在实际外业数据采集中,像控点数量和分布就尤为重要。为探究像控点数量对模型精度影响,共进行了四组实验,像控点的数量分别选择0个、2个、4个和6个。其中第一组不设像控点;第二组设cp1和cp4为像控点;第三组设cp1、cp2、cp3和cp4为像控点;第四组设cp1、cp2、cp3、cp4、cp5、cp6为像控点。验证点和像控点使用的是人工自制的平面靶标,三维坐标采用的是GPS-RTK采集(如图5所示):

图5 像控点坐标采集
四组实验飞行高度均为135m,航向重叠率设置为80%、旁向重叠率设置为70%,不同像控点倾斜摄影测量模型x、y、z坐标和实测结果偏差,像控点数对模型精度验证结果(如表2所示):
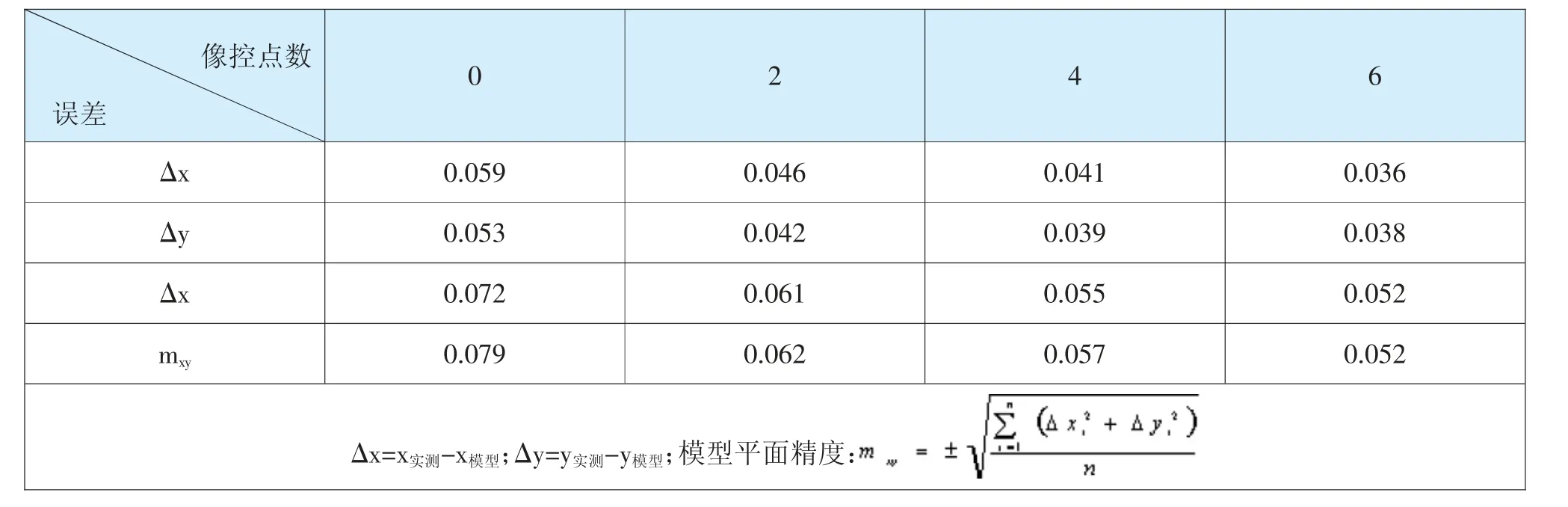
表2 像控点数对模型精度验证结果 单位:m
通过表2可以看出,加入像控点对倾斜模型精度有显著提高。在该实验中,随着像控点数量增加,倾斜摄影测量模型精度也不断增加,但是当像控点数量达到一定程度时,像控点数量对模型精度影响效果逐渐减弱。
3.2 影像重叠率对模型精度影响分析
重叠率是通过影像密集匹配特征点数量来影响模型精度,重叠率高则特征点数量多,错误匹配点数量少,模型精度高,并且重叠率高覆盖的影像越多,所包含的空间和纹理信息就越多,建模的效果就会越好。但是考虑到作业效率的问题,重叠度并不是越高越好,超过某个“标准”后,提高重叠率对模型效果的提升有限。并且由于小型多旋翼无人机重量越轻、体积越小,越容易受到外界气流的干扰,对飞行姿态影响较大,因此对重叠率要求更高。
本实验为探究重叠率对模型精度影响,共进行了五组实验,分别为航向重叠率70%和旁向重叠率为65%的第一组实验、航向重叠率75%和旁向重叠率为70%的第二组实验、航向重叠率80%和旁向重叠率为75%的第三组实验、航向重叠率85%和旁向重叠率为80%的第四组实验、航向重叠率90%和旁向重叠率为85%的第五组实验,五组实验均使用四个像控点,飞行高度均为135m,验证结果(如表3所示):

表3 重叠率对模型精度验证结果 单位:m
通过表3可以看出,重叠率对模型精度影响显著,由于影像重叠率低,所以每个地物点仅会在少量航片中显现,再提取连接点的量会很少,相片的连接点少自然会导致飞机的照片连接粗糙,最终导致提取的连接点平差结构弱,因而模型精度偏低,可以看出当横向和旁向重叠率达到80%左右时,外业采集效率和模型精度都较高。
3.3 飞行高度对模型精度影响分析
飞行高度对倾斜模型精度影响,是由于飞行高度影响地面分辨率进而影响模型精度。根据《低空数字航空摄影规范》,由相对航高计算公式可得,飞行高度越高,地面分辨率越低,而地面分辨率越低则会导致多视角影像密集匹配时错误匹配特征点数量增多,进而影响倾斜模型精度。
为探究飞行高度对模型精度影响,共进行了四组实验,飞行高度分别为45m、90m、135m和180m,横向和旁向重叠率均为80%,像控点数量均为4个,验证结果(如表4所示):
通过表4可以看出,本实验中飞行高度对模型精度影响不大,但是在实际工程作业中,飞行高度主要影响的是飞行航片中的GSD(每个像素的实际大小),飞机离地面越近,GSD数值越小,则模型精度越高。

表4 飞行高度对模型精度验证结果 单位:m
4.结束语
通过以上实验可以看出,像控点数量对模型精度影响较大,但是当像控点达到一定数量时,其影响效果减弱;影像重叠率对模型精度也有一定影响,但重叠率过高会影响外业作业效率,倾斜摄影测量外业作业时,合理的横向和旁向重叠率在80%左右;飞行高度对倾斜模型精度也有一定影响,但是较前两种因素,影响效果不大,在实际作业时,在保证精度和安全飞行高度下可选择合适的飞行高度即可。
