水肥一体机控制系统设计与试验*
2021-12-27金永奎赵海瑞薛新宇孙竹
金永奎,赵海瑞,薛新宇,孙竹
(1. 农业农村部南京农业机械化研究所,南京市,210014; 2. 江苏省农业机械试验鉴定站,南京市,210017)
0 引言
随着高效农业的发展以及节水、减肥的要求,水肥一体化技术和设备得到了广泛的应用[1-2]。在压差式施肥罐、高压施肥泵、文丘里施肥器、水力施肥泵等水肥一体化设备[3-5]的基础上,近年来水肥一体机应用比例越来越高[6]。水肥一体机由控制器控制,同时控制水肥供给,由泵辅助将肥液连续定量注入灌溉管道,能实现精确水肥配比。控制系统是水肥一体机的核心部分,决定了总体性能。国内外对控制系统进行了较多的研究,国外在大田和温室作物中已普遍应用,技术成熟先进[7-8];我国也对水肥一体机控制系统及方法进行了深入研究[9-14],李加念等[15]通过改变PWM的占空比对脉冲电磁阀进行控制,改变文丘里施肥器的吸肥量,实现施肥在1.25%~9.13%范围内可调;袁洪波等[16]利用增量式PID算法和改进Smith预估器对营养液的制备过程进行精确控制;王海华等[17]设计了粗细分段控制策略,较好地克服EC值的过量超调,同时混肥时间和实测EC值能够满足实际需求。目前水肥一体机类型很多,原理各异,受流量、压力、肥液浓
度、采用的部件及控制方法的影响很大,性能质量参差不齐,还存在调节时间长、配比波动大等问题。
本文针对大面积应用的水肥一体机研制配套的控制系统,采用变量注入、比例、EC/pH实时调节等技术,实现精准智能控制水肥流量,精确调整水肥配比,解决水肥一体化模式下灌水与施肥比例匹配性问题。
1 控制系统组成与工作原理
水肥一体机结构如图1所示,主要由输水系统、施肥系统、控制系统等部分组成。输水系统包括灌溉泵、主水管、混合腔、过滤器、主管流量计、压力传感器、田间电磁阀等,施肥系统由减压电磁阀、施肥管道、文丘里吸肥器、肥液桶、施肥电磁阀、施肥泵、搅拌电机等组成,控制系统包括PLC控制器、触摸屏、I/O模块、EC/pH传感器、压力传感器、流量计、变频器、液位传感器及软件等组成。主要技术参数见表1。
水肥一体机运行时,具有一定压力的灌溉水通过主管,当主管压力大于减压电磁阀设定压力时,减压电磁阀打开,水进入施肥管道,施肥泵运行,水流过文丘里吸肥器,在吸肥口产生负压,当吸肥电磁阀打开时,肥液桶内的肥液被吸入施肥管道,并进入主管,在混肥腔内与水混合,和灌溉水一起输送至田间。根据设定的施肥比例或EC/pH值,控制系统通过PWM方式控制电磁阀的开关时间实现吸肥量大小的调节。根据不同作物的需水、需肥规律,采用多通道配置和自动加肥装置,辅助均匀搅拌机构,通过反馈数据分析水肥配比比例、EC/pH值,实现不同施肥通道注肥量可调,解决作物对多种不同肥料肥量的差异需求。

图1 水肥一体机组成结构图Fig. 1 Composition structure diagram of integrated irrigation and fertilizer applicator1.低水位传感器 2.肥液桶 3.搅拌电机 4.文丘里吸肥器 5.EC/pH传感器 6.减压电磁阀 7.田间电磁阀 8.压力传感器9.持压阀 10.过滤器 11.混合腔 12.主管流量计 13.主阀 14.安全阀 15.灌溉泵 16.触摸屏17.变频器 18.控制器 19.施肥泵 20.吸肥电磁阀 21.吸肥流量计 22.肥液过滤器

表1 主要技术参数
2 控制系统设计
2.1 硬件设计
2.1.1 硬件组成
控制系统由PLC、扩展输入输出模块、传感器、执行元件及触摸屏等组成。控制系统硬件以西门子PLC为核心,通过逻辑程序控制各个执行机构实现水肥一体化功能。控制器选用西门子S7-200系列PLC,其具有体积小、成本低等优点且能够满足本系统设计要求。控制系统组成见图2。
触摸屏采用MCGS 10.2英寸规格,安装了嵌入式组态软件,具备强大的图像显示和数据处理功能,可完成现场数据的采集与监测、前端数据的处理与控制。
根据功能要求,搭建了EC、pH、压力、流量多元信息在线检测监控和反馈系统,其中主管上安装2只压力传感器,用于监测主管压力和工作压力;主管上安装1只流量传感器,用于测量主管流量;EC、pH传感器各1只,用于获取水肥混合后的EC、pH值;每个吸肥通道安装1只流量传感器,测量实时吸肥流量;每个施肥桶布置1只低水位传感器,用于检测肥液水位。EC/pH传感器采集的数据,需通过A/D 模块转换成PLC的数字信号,选择西门子EM231模块。通过反馈数据分析水肥配比比例、EC/pH值。
执行元件包括灌溉泵、施肥泵、变频器、施肥电磁阀、田间电磁阀、搅拌电机等。控制器通过发送信号给变频器实现对灌溉泵的控制,使工作压力达到设定值;施肥时启动施肥泵和施肥电磁阀,并启动相应通道的搅拌电机;田间电磁阀由控制器控制。

图2 控制系统组成图Fig. 2 Composition diagram of control system
2.1.2 PWM方式下吸肥流量检测方法
由系统的水力性能可知,吸肥量的影响因素较多,吸肥量变化很大,无法采用标定的方法确定每个通道的吸肥量,因此采用流量计对每个通道的实时流量进行检测,确保控制的精确性。不同的开阀时间、关阀时间、PWM不同周期均影响吸肥流量,流量在一个PWM周期内是不均匀的。流量计根据流量大小产生相应的脉冲,按照常规的采集方法是检测一个PWM周期内的脉冲数,由试验结果可知,存在很多无效脉冲,计算的结果偏差较大。采用计算开阀时间内脉冲数的方法,以开阀时间为采集脉冲数起始时间,以关阀作为停止采集的终止时间,计算总的脉冲数,通过标定可得到理想结果。
2.2 控制方法和策略
本水肥一体机灌溉水量通过设定系统压力,由压力传感器采集实时压力值,通过变频器控制灌溉泵转速,得到稳定的主管压力和供水量。水肥按比例、EC、pH三种参数进行控制,具体控制方法如下。
2.2.1 基于比例的变量施肥控制方法
基于比例的施肥方式要求每个通道都能独自按比例、且在运行过程中可自动变量吸肥。设计了5个通道,每个通道由文丘里管、施肥电磁阀和霍尔流量计组成。运行时文丘里管产生负压,电磁阀打开,肥液通过管道被吸入。霍尔流量计采集的脉冲信号传至PLC,通过分析计算得出实时流量q,同时主管流量由流量计采集并得出实时流量Q,按照式(1)可得实时比例k,其中q=采集到的脉冲数×每个脉冲代表的流量。
k=q/Q
(1)
变量控制采用PWM方式调节电磁阀开阀和关阀的时间,即占空比Dc,从而调节流量。其计算公式如式(2)所示。
Dc=t1/T
(2)
式中:t1——电磁阀打开时间,s;
T——控制周期,s。
施肥系统由于受多种因素影响,是大滞后、慢时变、非线性的复杂系统,控制采用PID方式,PID控制原理见图3。PID控制器的各系数决定了响应时间和稳态时的精度,通过试验对各系数进行整定,得出最优值。把最优值输入PLC的PID控制器中,控制系统运行,得到电磁阀的占空比,并自动调节,使得响应时间短,超调量小,实时值稳定在设定值附近,波动偏差小。每个通道由一个PID控制器独立控制。

图3 PID控制原理图Fig. 3 PID control schematic diagram
2.2.2 基于EC/pH的变量施肥控制方法
EC为水溶液的电导率,pH为酸碱度,每种作物在不同的生育期都有一个较佳的EC/pH使用范围。共有5个施肥通道,其中可选择1个作为pH通道,如果不选,5个通道都可以作为施肥通道。pH通道由一路PID控制器单独控制,根据设定值通过PWM方式控制电磁阀的占空比,调节吸酸量。pH实时值由传感器测得。EC值是由所选的施肥通道共同决定,所选通道之间可以设定比例,这样每个通道可灵活控制不同肥料的吸入量,从而满足作物对不同肥料的差异化需求。
各通道间的比例为:k1、k2、k3、k4、k5,其中k1最大。通道1的实时流量为Q1,则通道2流量为Q2=(k2/k1)Q1,通道3流量为Q3=(k3/k1)Q1,通道4流量为Q4=(k4/k1)Q1,通道5流量为Q5=(k5/k1)Q1。EC实时值由传感器测得,各通道流量由流量计测得。
在运行时,PID控制器根据EC设定值和实时值,计算通道1的占空比,此时通道1的实时流量为Q1,根据设定的各通道比例计算出各通道的目标值Q2、Q3、Q4、Q5,再根据各通道的实时流量,每个通道各自的PID控制器调节各电磁阀的占空比,通过多次调整,最终EC值和每个通道比例都达到设定值。
2.2.3 控制方法优化
传统的PID具有较好的稳定性,但很难兼具稳定和快速性,由于灌溉施肥运行过程中对肥料比例的要求较高,必须对传统PID进行优化,才能满足水肥一体化系统的控制要求。
针对EC、pH模式在开启时电磁阀占空比较小,达到设定值稳态时间较长的状况,控制策略采用分段式控制方法:先固定一个电磁阀占空比,当反馈值达到设定值的一定比例时,PID控制器开始控制运行,占空比和比例可调。在分段式控制方法下,系统的响应速度大大提高,同时减小了超调量,提高了系统精度。
2.3 软件设计
本系统有EC、pH、压力、流量传感器等模拟量输入,以此检测主管道管路中水肥混合液的电导率、酸碱度、压力和流量;数字量输入有泵和电磁阀的开启状态,数字量输出通过中间继电器控制泵开启关闭、电动阀通断。为了实现自动定量定比例施肥,运用西门子PLC S7-200的STEP7-Micro/WIN软件进行编程,对施肥灌溉时间段采用脉冲的方式进行分配,运用组态软件对通信参数进行相匹配的设置。水肥一体机在工作过程中,对施肥执行机构电动阀进行控制,流量计实时采集每个通道流量,通过电动阀PWM控制确定各通道的吸肥量,进而实现各通道自动定量施肥。
系统灌溉控制方式有手动、时间和流量三种,手动方式下可直接对灌溉泵、施肥泵、田间电磁阀和施肥电磁阀进行操作,但不能设定水肥的比例或EC/pH;时间方式可设置灌溉启动时间和时长,同时施肥可选择比例或EC/pH方式,并能对每个通道单独设置比例、施肥时间;流量方式可设置灌溉启动时间和灌溉量,同时施肥可选择比例或EC/pH方式,并能对每个通道单独设置比例、施肥量。以时间方式和比例施肥为例控制流程见图4。
软件界面见图5~图7。界面为时间控制模式下的运行界面、参数设置界面和施肥配方界面,可对每个田间电磁阀设定灌水时间(分钟)、施肥时间(分钟)和不同的工作压力,多个电磁阀轮灌运行。施肥可分成三段,即可设置施肥前灌水时间,水肥同施时间和施肥后冲洗时间。施肥时有按比例或EC/pH值2种方式,按比例方式时水肥按设定的比例值进行配比,按EC/pH值时水肥按混合后的EC/pH值进行配比。每个通道间可设置不同的比例,达到精细化管理。同时设置值可作为配方存储。

图4 控制系统流程图Fig. 4 Flow chart of control system

图5 时间模式软件界面Fig. 5 Software interface of time mode

图6 时间模式参数设置界面Fig. 6 Parameters setting interface of time mode

图7 施肥配方界面Fig. 7 Interface of fertilization formula
3 系统测试试验
测试试验主要检测比例、EC、pH三种水肥一体化模式不同工况下控制系统的响应情况。灌溉泵由变频器控制,可通过压力传器或流量传感器调节压力和流量,为试验时提供不同的条件。吸肥电磁阀通过PWM方式调节开关时间,从而实现变量吸肥。吸肥流量由流量计检测。吸肥比例由主管流量计和吸肥流量计实时反馈。EC和pH传感器测得系统EC和pH值。系统可自动记录运行时各参数值。试验现场照片见图8。
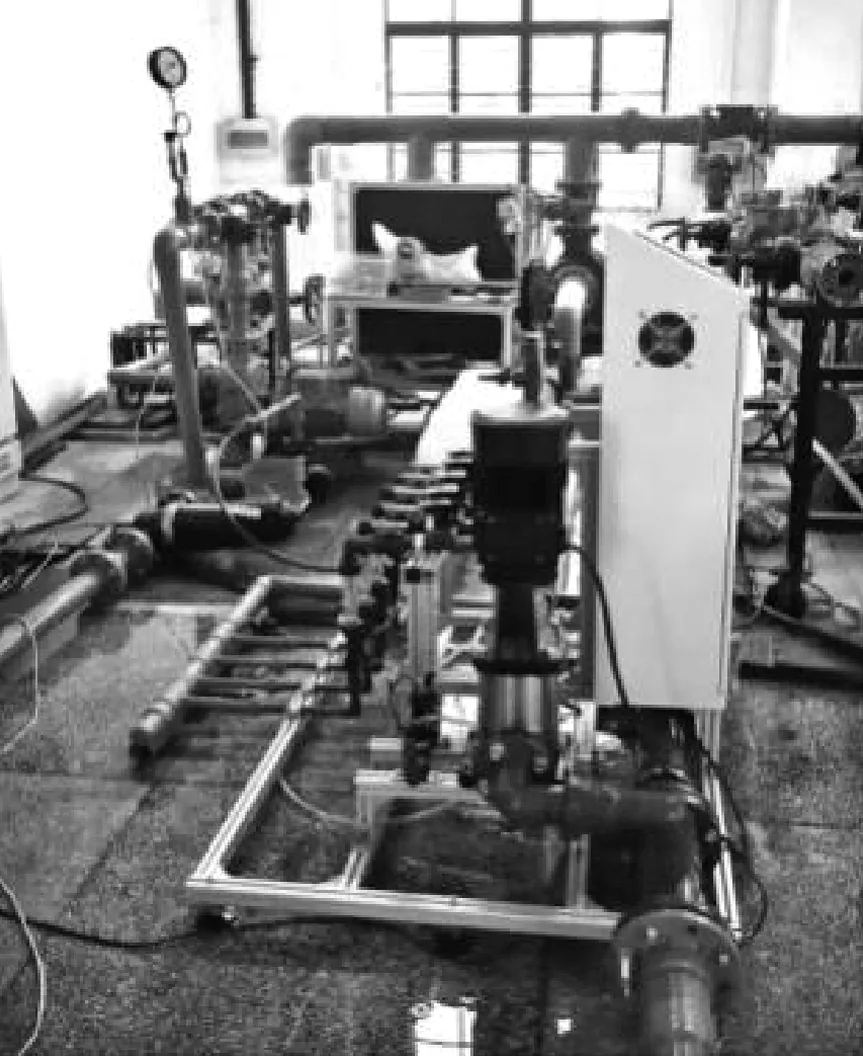
图8 试验现场照片Fig. 8 Photo of test site
3.1 比例模式
在比例模式下,5个吸肥通道均可选择同时工作,相互独立,各由一路PID控制器控制。在试验装置上PID参数先由PLC自整定得到,Kp=1.045,Ti=0.055,Td=0,根据运行结果对各参数进行了优化,优化后Kp=1.1,Ti=0.15,Td=0.1,两种PID参数的运行结果见图9。在优化参数下比例模式的性能参数:比例调节范围为4‰~20‰,响应时间为80 s,最大超调量小于5%,稳态精度为3%。
对样机在PID参数Kp=1.1,Ti=0.15,Td=0.1情况下进行了测试,施肥比例分别设置为5‰、10‰、15‰、20‰和25‰,比例—时间响应曲线如图10所示。达到稳态的响应时间小于60 s,最大超调量小于5%,稳态精度为1%。

图9 PID参数优化前后比例偏差—时间响应曲线Fig. 9 Proportional deviation time response curve before and after PID parameter optimization

图10 不同水肥比例设定值时比例—时间响应曲线Fig. 10 Proportion time response curve under different water and fertilizer ratio settings
在5‰同一施肥比例下,测试了不同流量时的比例—时间响应曲线,如图11所示。结果表明:流量越小超调量越大,达到稳态的响应时间小于60 s,最大超调量13%,稳态精度为1%,同一PID参数能较好地适应流量变化。

图11 不同主管流量时比例—时间响应曲线Fig. 11 Proportional deviation time response curve at different main pipe flow
3.2 EC模式
在EC模式下,5个吸肥通道均可选择同时工作,各通道设置相对比例,一路PID控制器通过EC值调节吸肥电磁阀占空比,其余PID控制器根据此通道的流量和设置的比例按流量来调节吸肥电磁阀占空比,调节控制相对较复杂,难度较大。
测试了EC模式下,PID的比例、积分和微分参数与主管流量、母液比例、EC目标值间的关系,发现同一PID参数对各个指标的响应不同,同一参数可较好地适应不同的母液比例(图12)、EC目标值(图13),而主管不同流量需要不同的参数。在运行过程中,EC设定值分别为2 000→3 000→1 000→2 000 μs/cm,系统能自动快速响应,调节至设定值,保持稳态和较高的精度。

图12 不同母液浓度时EC—时间响应曲线Fig. 12 EC time response curve at different mother liquor concentrations
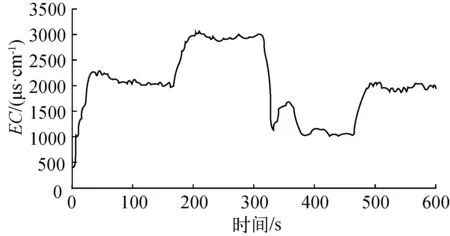
图13 不同EC设定值时系统响应曲线Fig. 13 System response curve at different EC settings
通过试验,建立了PID各参数与流量间的数学模型,并通过检测主管流量值实时改变PID参数,从而达到了响应快、稳定性好、精度高。EC调节范围为1 000~4 000,响应时间为80~120 s,稳态精度为4%。

表2 流量与PID参数对应表
比例系数与流量间的数学模型为:Kp=1.237 3lnQ-1.233 7,相关系数R2=0.990 0,说明相关性很好,如图14所示。
积分系数与流量间的数学模型为:Ti=2E-06Q3+0.000 5Q2-0.054 7Q+1.430 5,相关系数R2=0.997 4,说明相关性很好,如图15所示。微分系数为常量,通过测试确定为Td=0.04。
对EC值随流量的响应情况进行了验证,EC设定2 500 μs/cm,流量从10.9→21.5→30.5→37.7→23.6 m3/h变化,系统自动调节PID参数,结果表明EC值能快速响应并保持稳态和较高的精度,如图16所示。

图14 比例系数Kp随流量变化曲线Fig. 14 Variation curve of proportional coefficient Kp with flow

图15 积分系数Ti随流量变化曲线Fig. 15 Variation curve of integral coefficient Ti with flow

图16 主管流量变化时系统自动调节EC—时间响应曲线Fig. 16 EC time response curve under flow change and system automatic regulation
3.3 pH模式
在pH模式下,一般只需要选择1个吸肥通道即可调节灌溉水的酸碱度,可与EC通道同时工作。pH通道由单独一路PID控制器通过pH值调节电磁阀占空比,由于只有1路输入,调节相对容易,不过pH传感器特性是响应滞后明显,所以超调量较大,到达稳定的时间较长,约120 s,进入稳态后精度能很好控制,偏差较小,可达到±0.1,稳态精度较高。图17为PID参数Kp=2.2,Ti=0.39,Td=0.05时的pH—时间响应曲线。

图17 不同主管流量时pH—时间响应曲线Fig. 17 pH time response curve under different main pipe flow
4 结论
1) 本文设计了由PLC、扩展输入输出模块、传感器、执行元件及触摸屏等组成的水肥一体机控制系统,并提出了在开关阀时间内采集脉冲数作为PWM方式下吸肥流量检测方法,实现了对水肥的精准变量控制。
2) 水肥可按比例、EC、pH三种参数进行控制,采用PID控制方式,通过传感器的反馈值实时调整施肥电磁阀占空比,能快速达到设定值并有较高的稳态精度。结合试验对PID参数进行了优化,采用优化后的参数,比例调节范围为4‰~20‰,响应时间为80 s,最大超调量小于5%,稳态精度为3%;EC调节范围为1 000~4 000 μs/cm,响应时间为80~120 s,稳态精度为4%;pH响应时间120 s,稳态精度为±0.1。
3) 由于水肥系统存在非线性、滞后性以及不确定干扰等特点,经典PID控制难以保证复杂环境下进行快速响应和较高的稳态精度,因此后续工作将结合模糊规则、神经网络模型,形成综合的控制方法,进一步提高系统的性能。
