基于多传感器融合的煤矿危险气体巡检系统
2021-12-27孟广瑞
孟广瑞,杨 闯
(1.国家能源集团煤炭与运输产业管理部煤矿智能化办公室,北京 100010;2.中煤科工集团沈阳研究院有限公司,辽宁抚顺 113122;3.煤矿安全技术国家重点实验室,辽宁抚顺 113122)
目前,煤矿危险气体事故仍是煤矿生产过程中最大的安全隐患之一,也是我国煤矿安全生产的重点和难点之一。其中,危险气体爆炸事故的危害性最为严重[1]。对矿井危险气体的实时监测是实现煤矿生产安全的重要措施之一,通过对矿井危险气体浓度的检测和分析,为危险气体预测提供实时、精确、可靠的数据,实现提前预警,做到早处理、早防范。
煤矿针对井下危险气体的检测方法主要是在固定位置安装单一传感器进行定点监测。由于井下气体分布情况比较复杂,在不同类型巷道、不同涌出情况和不同风速等条件下,其危险气体的分布都不同,单一传感器采集到的气体数据不能完全代表当前被测位置的真实情况,进而影响工作人员对井下环境的正确判断[2]。相关领域的研究人员提出了一种煤矿危险气体探测机器人,大多是对其结构、防爆设计、运动避险方面进行研究[3-4],缺少针对多种传感器融合技术的研究。
为了提高井下危险气体的检测精度,有效提升数据的实时性和全面性,设计了基于多传感器融合技术的煤矿危险气体巡检系统。可移动机器人本体作为执行层,其上搭载的多种传感器,可进行多种不同危险气体和温湿度等环境信息采集,通过自适应加权融合算法和BP 神经网络算法对其采集到的数据进行融合,在监控平台上即可读取各参数信息,实现预警报警、报表生成等功能。
1 煤矿危险气体巡检系统
1.1 系统整体结构
系统整体结构图如图1。

图1 系统整体结构图Fig.1 Overall structure of the system
煤矿危险气体巡检系统架构分为决策层、网络层、执行层3 层。
1)决策层。决策层由监控平台、系统管理软件、图像存储服务器、边缘计算服务器、数据存储服务器和核心交换机组成,主要负责工作任务下发,人工监控,应急处理、任务日志记录查询、报警等功能。
2)网络层。网络层包括通信基站和网络服务器,根据井下具体情况可采用光纤网络或WIFI 网络进行连接,对整个作业范围实现网络全覆盖,网络层能够完成到达包的存储、交换和转发,实现信息的拥塞控制,可提高网络传输效率且能够降低丢包率,为机器人间的数据传递以及现场执行层和决策层数据传递提供可靠稳定的网络[5],对于像危险气体巡检系统中,多传感器所传递的大量信息同时接收情况,有着重要的实际意义。
3)执行层。执行层是现场的实际作业设备,即危险气体巡检机器人,机器人可分为行走机构模块、机械本体、供电模块、智能感知模块、控制模块和通讯模块。主要负责在煤矿井下巷道内实时监测指定位置的气体参数,可实现定时巡检、定点巡检、指定特殊任务巡检、遥控巡检和远程巡检等多种巡检方式。其中智能感知模块中包含多种类型传感器,是实现机器人巡检功能的主要模块。
1.2 危险气体巡检作业流程
煤矿危险气体巡检由巡检机器人具体执行操作,机器人能够完全代替巡检工人进行自主巡检,危险气体巡检作业流程示意图如图2。
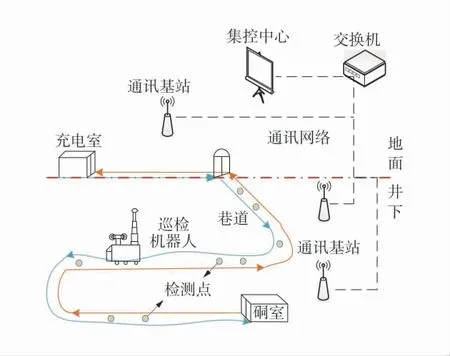
图2 危险气体巡检作业流程示意图Fig.2 Schematic diagram of hazardous gas inspection process
由图2 可知,充电室、集控中心、交换机设置于地面上,机器人在地面充电室完成充电后,即进入井下巷道进行巡检作业,途中蓝色曲线表示机器人从地面到井下巷道的行进路线。巷道内环境复杂,可预设多个检测点,巡检机器人自主行走至检测点后可实现重点监测作业。井下设置硐室,可供巡检机器人在没有作业任务时进入室内安置,能够避免井下工作人员误撞以及其他生产过程中造成的不必要伤害。当整条巷道巡检作业完成后,机器人可沿图2 中橙色路线返回至地面充电室。地面和井下均设置通讯基站,保证了数据信息的实时传输。
2 危险气体巡检机器人
煤矿危险气体巡检机器人可实现井下巷道内自主行走、智能巡检,能够减轻工作人员的劳动强度、降低劳动风险,及时发现问题,避免事故扩大化。机器人通过多传感器融合技术实时采集、存储、传输现场危险气体体积分数数据,然后通过对危险气体体积分数数据融合计算分析,判断是否存在危险气体体积分数过高,实现预警报警处理。
2.1 危险气体巡检机器人功能设计框架
巡检机器人包括智能感知模块,机器人功能的实现是基于该模块对各类信息的采集和处理,即传感器信息数据采集和处理,危险气体巡检机器人功能设计框架图如图3。

图3 危险气体巡检机器人功能设计框架图Fig.3 Function design framework of dangerous gas inspection robot
由图3 可知,机器人功能可分为7 大类,其中任务统计功能为作业前接收任务指令;路径生成功能为机器人实现自主行走巡检的必要条件;对作业状态查看、维护保养记录、电量信息提示和预警提示信息的统计分析,能够保障巡检作业可靠运行;环境参数监测功能可实现煤矿井下行走路况、危险气体体积分数等的实时监测,当存在体积分数超出预设值时即可实现报警预警处理。实现以上功能的传感器数据信息将最终显示在上位机终端上,具有分类显示、数据查询、报警弹窗和处理日志记录功能。
2.2 巡检机器人工作原理
巡检机器人利用一个自主运行平台,使同种类或不同类传感器融合在一起,利用多种不同类型的传感器技术优势将各自采集到的数据提供给整个系统[6]。通过数据校准及相关性分析,以提升系统数据规划、分析以及智能化处理能力,实现对井下待巡检区域内的路况信息、烟雾、一氧化碳、甲烷等体积分数的检测。
在所设计的控制系统中,需要实现机器人运动控制和环境智能感知控制,巡检机器人的控制结构图如图4。主控制器为工控机或防爆PC[7],在机器人运动控制模块,通过单片机实现各电机的控制,搭载红外避障传感器和超声波测距传感器,实现自主或遥控避障。环境智能感知模块包括数量较多的不同种类传感器,可使机器人通过混合导航方式进行路径识别、路径规划[8],以及到待检测区域进行多种危险气体体积分数检测,然后将检测结果通过网络传输至监测后台。

图4 危险气体巡检机器人控制结构Fig.4 Control structure of dangerous gas inspection robot
危险气体巡检机器人控制系统工作流程如下:
1)工作人员通过上位机为巡检机器人发布1 个巡检任务,巡检机器人将执行该任务的时间、具体位置、数据安全检测范围等相关资料存储到数据库中。
2)巡检机器人的运动控制子系统会收到巡检机器人目前正在执行的任务和巡检设备的位置信息,这些信息通过任务控制模块对数据库中的数据进行反复读取获得。
3)巡检机器人通过判断巡检位置信息,智能制定出对该位置要进行的巡检项目。需要巡检瓦斯体积分数时,机器人采用甲烷传感器,以判断该位置是否在安全; 巡检需要人员经过的道路时,机器人则开启多传感器对该道路进行多次循环巡检,以判断该道路是否安全。
4)数据库会记录设备巡检结果,其中包含超出安全范围的警告。
5)Web 服务模块读取对设备巡检后的结果及超出安全范围的警告并显示在页面上。
3 多传感器融合技术在系统中的应用
3.1 多传感器融合算法
多传感器系统通过多个传感器获得更多种类和数量的传感数据, 因此经过处理得到的多种信息能够对环境进行更加全面的描述,与单传感器相比,这种结构上的差异导致了多传感器系统的处理过程更加复杂[9],在实际应用中多传感器系统可以被理解为1 个多入多出的系统,多传感器系统结构框图如图5。

图5 多传感器系统Fig.5 Multi-sensor system
由图5 可知,基于井下环境,危险气体巡检系统中设计12 种传感器,每2 种传感器信息进行融合后再与第3 种传感器信息进行融合,逐层递进即可实现所有传感器信息的融合。
多传感器融合是将来自各传感器的测量数据进行综合处理,以获得更加精准、稳定和可靠的融合数据,而在多传感器融合过程中包含了大量的不确定信息,因此多传感器融合是一个复杂的不确定信息处理过程,应尽可能地减少融合处理过程所产生的算法误差。BP 神经网络属于有导师式的学习方式,即有监督的神经网络算法,可实现各层误差的估计,根据各层的误差不断动态调整各神经元权值,从而减小输出误差[10]。因此系统采用BP 神经网络算法实现多传感器融合。
3.2 基于多传感器融合技术的井下危险气体巡检
BP 神经网络具有关联存储器和预测输出的能力,需要在预测之前进行训练[11]。根据其特点,可得出基于多传感器融合的井下危险气体检测流程如下:①采用多个传感器对井下环境数据进行采集,并去除每一个传感器数据中的无用信息;②将多个传感器采集的路况、各气体数据进行融合,同时对环境数据中的重复信息进行去除,减少数据的存储空间,获得高质量检测的样本数据;③将待检测数据划分为学习数据和验证数据;④根据井下环境检测学习数据,对BP 神经网络结构进行初始化;⑤采用BP神经网络对各种类危险气体检测学习数据进行训练,建立危险气体检测模型。
4 结 语
设计了基于多传感器融合的煤矿井下危险气体巡检系统,采用可移动巡检机器人为执行机构,引入多传感器融合技术,应用BP 神经网络算法提高了原始数据的准确性和可靠性,输出危险气体体积分数检测结果,有效评估待检区域安全状态。基于多传感器融合的煤矿井下危险气体巡检系统解决煤矿井下作业区域多种危险气体进行同时监测的问题,为危险气体预测提供实时、精确、可靠的数据。