关于岸桥电气驱动和控制系统的基本方式及特点研究
2021-12-24胡颖华
胡颖华
摘要:当前,现代岸边集装箱起重机的主要研究方向是电气驱动和控制系统。通常情况下,依据岸桥发展的基本特点进行统计与研究。分析比较岸桥交流驱动和直流驱动都有各自呈现出来的优点与缺点,到底应该选择哪种驱动系统需要重点研究基本驱动原理,从而找到其中存在的规律性。
关键词:岸桥电气驱动;控制系统;基本方式及特点
岸桥设计前期,需要将电气驱动的具体方案确定下来。第一,方案在实施的时候,必须要将驱动对象负载确定下来,进而也让负载的特点得到确定。第二,岸桥运动的时候,起重机的起升机构是有负载量的,需要在起重量不变的基础上让负载转矩保持不变。第三,日常工作的过程当中,集装箱起重机多半时间是空载运行。依据实际特征起重机带载运行的情况下,也要依据循环功率来实施运行。所以,平时工作的情况下,为让工作效率得到全面性提高,可以在空载时,让起重机工作速度不断加快。
1、直流驱动与交流驱动的分析
1.1直流驱动与交流驱动比较
对于岸桥式起重机,应该同驱动做详细的比较,系统化的,全面分析直流驱动与交流驱动。岸桥驱动早期是采用直流驱动的方式运行,其优点可以呈现在如下几个方面。第一,相对较而言,直流驱动,在速率调节方面更好,容易让电压主调节作用得以实现。第二,启动的过程中,转矩大,但在动态下有很好的响应。第三,起重机在下降的过程中,可以把转变完成的电能反馈到电网中,从而让系统效率不断得到提高,也让资源得到有效性的节约。另外,在缺点方面,直流电机要比交流电机的结构相对复杂化,而且价格也比较高,维护难度大,所以不适合长期去使用。还有就是直流电机会使力矩变大,造成功率出现不自然的问题。
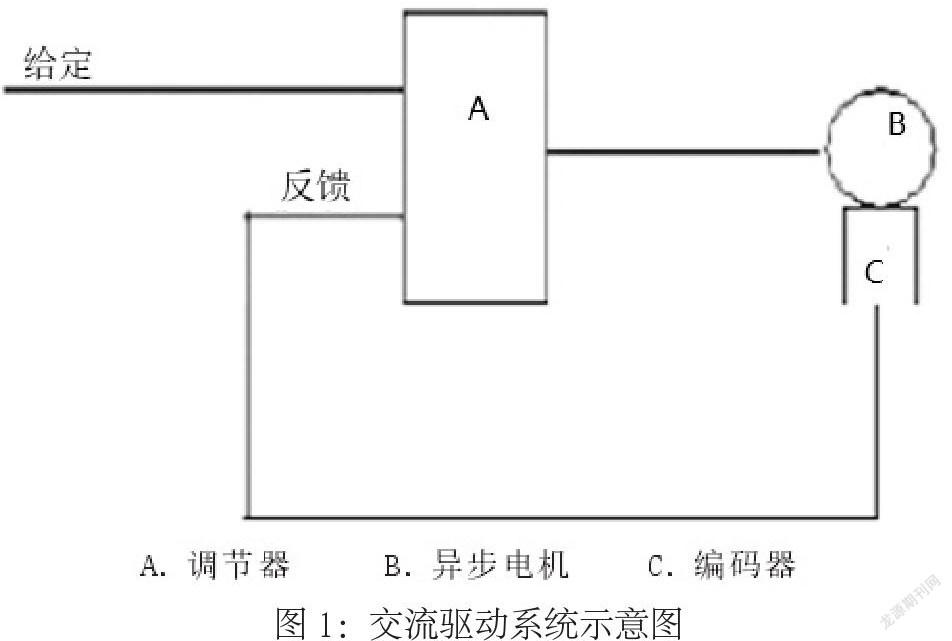
1.2交流驱动系统
驱动系统如图1所示。
交流驱动装置应用过程,需要重视启动过程,交流电机对岸桥运行起到了重要的作用,实际工作开展过程,应根据交流异步电机应用内容,全面确定基本特征。此外,在输出转矩运行过程,应重视转速问题,要明确相关的关系。这样设备运行时,能加强驱动控制,利于掌握空载与带载运行信息,从而提高分析水平。
2、岸桥对交流驱动系统要求
岸边集装条起重机,有很多结构形式存在,但是最为主要的形式有单箱梁,双箱梁等。而小车驱动主要包括钢丝绳牵引式与自动驱动式两种形式。
针对于重要的起升节点环节,起重机恒功率的控制才是关键因素,需要不断加强重视。起重机在工作的整个过程当中,额定负载的时候,电机转速就为额定转速。除此之外,设备负载减少,电机速度就要做出相应的优化与调整。
整个起重机在工作的过程中,变频器的作用就是利用闭环控制自动检测负载转矩,并且也要依据转矩变化促使恒功率保持在良好的输出状态。而起重机空载的时候,可以切实全面提高设备的速度,从而也进一步提高了工作质量与工作效率。
对于运行设备而言,不管是起升还是府仰的机构,都要反馈处理热能与动能的转速。通常情况下,可以利用制动电阻消耗能量,但是会对资源有所消耗。另外,合理再利用的方式非常适用,能够让能量直接反馈到电网当中,最终实现能量之间的有效性互通。
3、岸桥电气驱动和控制的基本特征
从岸桥电气运行实际看,其控制具有一定的特征,基本特征的分析也关系到实际工作的开展,因此要提高认识。岸边集装箱起重机,重点研究的技术就是电气驱动和电气控制,可以在分析的过程中充分了解到很多方面的特性,因此需要在实际工作当中,格外关注岸桥的方向发展,起升防下坠的功能,以及如何实现半自动与全自动的操作。
3.1岸桥向更重、更高、更长、更快的方向发展
要想岸桥能够全面发展,更加需要关注几方面内容。第一,岸桥的重量变大,必然也会影响起重机重量,但根据具体码头工作实际,要避免锚头承受力过大,需要减少起重机重量,实现轻量化发展,此阶段需要技术人员提高认识。也就是要意味着要不断改善速度的驱动效果,从而也进一步提高工作效率。第二,轨上起升高度,随着集装箱船舶的优化与改进,轨下升高度也跟着码头条件开始优化,如此,岸桥在运行的时候,才会突显出能量反馈的重要性意义。第三,因为增加了集装条运输船舶规模,起升机构的起升高度增加的同时,也会让小车总行程逐渐加大,从而促使电气驱动的高效化和稳定化。第四,对于岸桥起升速度而言,参与是较为稳定的,其空载运行的时候通常在固定化的范围,比如,额载运行是90米/分钟。另外,根据加速度分析,起动机起升过程应考虑加速功率,通过全面分析,能为变压器与起升驱动器的选择提供参考,利于技术人员根据数据信息科学进行分析。第五,比较稳定的参数还有岸桥小车速度,空载与额载,在实际运行的时候都有着比较快的速度。如果想要让性能指标达到实际要求,需要电气驱动系统的性能可以保持在良好状态,从而迅速将功率加以改善。
3.2应该具有起升防下坠功能
以往传统意义上的起重机需要在实际运行的过程中,具备起升的基本功能,预防出现下落的基本情况。起重机拉起重物的一瞬间,会有短暂的下降现象开始出现,从而在结束下降的过程中再逐渐升起。依据实际存在的现象可以切实体会到存在的不足之处。所以在起重机提升重物的时候,应该科学化,合理化的增加电动机输出的功率,不断强化功率下降的瞬间,进一步也让上升的动力得以增加。
3.3半自动、全自动操作的实现
半自动与全自动技术的应用,为起动机操作提供了技术保证,为了全面实现其技术的应用,应重视从几方面入手。第一,半自动通过运用到开锁与闭锁过程,需要技术人员手动完成,而其他动作也可以利用防摇系统等辅助系统让自动化得以实现。第二,全自动操作,该方式更加需要借助控制系统,通过全自动模式必然能提高工作效率,也是新时期集装码头发展的重要方向,全自动化是精准的,同时也避免了人为因素的干扰,利于实现岸桥自动循环。一方面可以让司机工作强度不断降低,让分配的劳动资源更为合理化,另一个方面可以全面提高工作的精确度,以及提高整体生产的效率。而半自化,全自动化操作是目前起重机研究的重点所在。
4、结语
总之,通过实践分析,结合具体工作实际,探索了岸桥电气驱动和控制系统运行的相关内容,作为技术人员,应结合当前形势,全面的进行驱动系统分析与应用研究,这样不仅保证了岸桥电气驱动和控制水平的提高,也能提高工作效率,利于更加全面的開展管理工作。总之,技术人员要根据岸桥电气驱动和控制的特征,科学的开展分析,加强技术交流,总结有效的技术应用方法。
参考文献:
[1]王超,孙琳,陈慧,刘中祥.基于MATLAB的起重机械起升电机调速方式的仿真研究[J].能源技术与管理,2016(01).
[2]蔡峰.ZPMCCHA110-Z系列变频器在岸边集装箱起重机中的应用[J].起重运输机械,2011(06).
[3]潘超,左健民,汪木兰.基于前馈及反馈补偿的高性能直线伺服系统[J].系统仿真学报,2010(12).
[4]余凤豪,吕飞,张松涛,吉哲.永磁同步直线电机的数学模型分析[J].舰船电子工程,2010(09).
[5]王国彪,赖一楠,范大鹏,杨华勇,王时龙.新型精密传动机构设计与制造综述[J].中国机械工程,2010(16).
[6]张明超,尹文生,朱煜.永磁同步直线电机推力波动建模与抑制[J].清华大学学报(自然科学版),2010(08).
[7]赵瑞芹,田小涛.减小永磁同步伺服直线电机磁阻力的研究[J].煤矿机电,2010(04).
[8]宋玉,陈国鼎,马术文.交流伺服进给系统数学模型研究及其仿真[J].机械,2010(07)
